知不足而奋进 望远山而前行
目录
前言
前言:
在这个快节奏的开发环境中,面对紧迫的项目截止日期和有限的资源,我们作为软件工程师需要具备快速解决问题的能力。本项目要求我们设计一个基于STM32的BSP驱动,以实现一个智能充电状态显示系统,该系统通过四个LED灯来展示充电状态和电量百分比。尽管在产品最终的电路板还未完成的情况下,我们只有开发板可以使用,但我们仍然面临着快速完成这个任务的压力。
在这个过程中,我们将采用模块化的方法来编写代码,以确保其可读性和可维护性。我们将定义一系列接口,以便其他开发者在将来可以轻松地与我们的驱动代码集成。我们还将在设计中考虑时间管理和延时问题,以确保LED灯的闪烁效果能够准确地反映充电状态。
目标
- 能够理解bsp开发
- 能够基于需求进行bsp驱动封装
内容
需求介绍

开发版中有4个灯,现在需要用4个灯显示充电情况:
- 开始充电时,需要呈现出流水灯闪烁
- 4盏灯表示当前的电量
- 充电流水灯起始位置是当前电量,全部点亮后,再次从当前电量位置进入流水灯效果
- 结束充电时,关闭充电显示,当前电量进行闪烁3次,然后熄灭。

现实问题
- 产品最终电路板还没画好,目前只有产品所使用的芯片对应的开发板。
- ADC功能是别人开发,还没完成。
- 老板要求,如果开发板好了,要尽快完成工作。
需求分析
要啥没啥,还得尽快完成。盘点手头有的东西,开发板。构建测试案例逻辑,方便后续移植。
测试案例设计:
- 准备工作,4个灯,3个按钮
- 按钮1按下时,模拟开始充电
- 按钮2按下时,模拟停止充电
- 按钮3按下时,模拟电量增加。
如果测试方案通过,基本上功能完成,那么后续其他人工作完成后,只需要对接以下逻辑:
- 灯对应的引脚和最终设计的电路板引脚进行校准
- 开始充电
- 电量变化时,更新电量
- 结束充电
编码实现分析:
- 需要把4个灯作为一个业务逻辑整体,完成一套关于电池电量显示的驱动
- 需要抽象出业务逻辑,转换为函数实现
测试案例构建
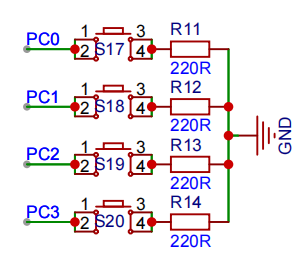
- PC0作为:开始按钮
- PC1作为:停止按钮
- PC2作为:电量更新按钮
按钮逻辑构建
static void GPIO_config(){
// PD0 开始充电
// PD1 结束充电
// PD5 电量变化
// rcu时钟
rcu_periph_clock_enable(RCU_GPIOD);
// 配置GPIO模式
gpio_mode_set(GPIOD,GPIO_MODE_INPUT, GPIO_PUPD_PULLUP, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_5);
}
int main(void) {
// 系统滴答定时器初始化
systick_config();
// GPIO初始化
GPIO_config();
// LED初始化
Battery_led_init();
FlagStatus pre_state0 = SET;// 默认高电平抬起
FlagStatus pre_state1 = SET;// 默认高电平抬起
FlagStatus pre_state2 = SET;// 默认高电平抬起
uint32_t cnt = 0;
uint8_t power = 1;
while(1) {
// PC0
FlagStatus state0 = gpio_input_bit_get(GPIOC, GPIO_PIN_0);
if (state0 != pre_state0){
if(state0 == RESET){ // 当前低电平, 上一次为高电平,按下
Battery_led_start(power);
}
pre_state0 = state0;
}
// PC1
FlagStatus state1 = gpio_input_bit_get(GPIOC, GPIO_PIN_1);
if (state1 != pre_state1){
if(state1 == RESET){ // 当前低电平, 上一次为高电平,按下
Battery_led_stop();
}
pre_state1 = state1;
}
// PC2
FlagStatus state2 = gpio_input_bit_get(GPIOC, GPIO_PIN_2);
if (state2 != pre_state2){
if(state2 == RESET){ // 当前低电平, 上一次为高电平,按下
// Battery_led_turn_off(LED1);
Battery_led_update(++power);
}
pre_state2 = state2;
}
// 间隔50个10ms = 500ms执行一次led的状态更新
if(++cnt % 50 == 0){
Battery_led_loop();
}
delay_1ms(10);
}
}BSP驱动构建
接口定义
-
驱动初始化,属于标配
-
业务相关的操作行为抽象化
-
时序问题
void Battery_led_int();
具体的业务抽象行为
void Battery_led_start(uint8_t power);
void Battery_led_stop();
void Battery_led_update(uint8_t power);在涉及到需要控制时间的问题时,我们通常有以下做法:
- 自己主动调用 delay来进行延时
- 使用统一的延时,到达自己的时间点就去执行
自己调用delay 不利于后续的移植。
采用统一时钟,方便移植,也方便时间片统一调度管理
业务实现
-
采用bsp独立驱动进行开发
-
状态管理,通过status记录当前状态。
-
电量记录,记录当前电量。
-
充电闪烁计数,记录当前的闪烁的值。
#ifndef BSP_BATTERY_LED_H
#define BSP_BATTERY_LED_H#include "gd32f4xx.h"
#define LED1 1
#define LED2 2
#define LED3 3
#define LED4 4void Battery_led_init();
void Battery_led_turn_on(uint8_t led_index);
void Battery_led_turn_off(uint8_t led_index);
void Battery_led_turn(uint8_t led_index, uint8_t value);
void Battery_led_start(uint8_t power);
void Battery_led_loop();
void Battery_led_update(uint8_t power);
void Battery_led_stop();
#endif
#include "bsp_battery_led.h"
#include "systick.h"// 声明gpio初始化所需参数的结构体
typedef struct {
rcu_periph_enum rcu;
uint32_t port;
uint32_t pin;
} Led_GPIO_t;// 声明所有gpio对应参数的数组
Led_GPIO_t g_gpio_list[] = {
{RCU_GPIOC, GPIOC, GPIO_PIN_6}, // LED_SW
{RCU_GPIOD, GPIOD, GPIO_PIN_8}, // LED1
{RCU_GPIOD, GPIOD, GPIO_PIN_9}, // LED2
{RCU_GPIOD, GPIOD, GPIO_PIN_10}, // LED3
{RCU_GPIOD, GPIOD, GPIO_PIN_11}, // LED4
};// 用于计算数组长度的宏
#define MAX_LED_COUNT (sizeof(g_gpio_list) / sizeof(Led_GPIO_t))/**********************************************************
- @brief LED GPIO初始化
**********************************************************/
static void GPIO_config(rcu_periph_enum rcu, uint32_t port, uint32_t pin) {
// 初始化为推挽输出模式
rcu_periph_clock_enable(rcu);
gpio_mode_set(port, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, pin);
gpio_output_options_set(port, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, pin);
}
void Battery_led_init() {
uint8_t count = MAX_LED_COUNT;
for(uint8_t i = 0; i < count; i++) {
Led_GPIO_t gpio = g_gpio_list[i];
// 初始化
GPIO_config(gpio.rcu,gpio.port, gpio.pin);
// 默认全部拉高(关闭)
gpio_bit_write(gpio.port, gpio.pin, SET);
}// 总开关拉低(打开)
gpio_bit_write(g_gpio_list[0].port, g_gpio_list[0].pin, RESET);
}// 开灯
void Battery_led_turn_on(uint8_t led_index) {
Led_GPIO_t gpio = g_gpio_list[led_index];
gpio_bit_write(gpio.port, gpio.pin, RESET);
}// 关灯
void Battery_led_turn_off(uint8_t led_index) {
Led_GPIO_t gpio = g_gpio_list[led_index];
gpio_bit_write(gpio.port, gpio.pin, SET);
}/**********************************************************
- @brief 设置灯亮灭
- @param led_index LED索引
- @param value 0亮,其他灭
- @return
**********************************************************/
void Battery_led_turn(uint8_t led_index, uint8_t value) {
Led_GPIO_t gpio = g_gpio_list[led_index];
gpio_bit_write(gpio.port, gpio.pin, value ? RESET : SET);
}
int state = 0; // 0:停止, 1:充电中
uint8_t current_power = 0;
uint8_t show_power = 0;
/**********************************************************- @brief 开始充电流水灯
- @param 当前电量[0,1,2,3,4]
**********************************************************/
void Battery_led_start(uint8_t power) {
current_power = power;
show_power = current_power;state = 1;
}void Battery_led_loop() {
if(state == 0) {
Battery_led_turn_off(LED1);
Battery_led_turn_off(LED2);
Battery_led_turn_off(LED3);
Battery_led_turn_off(LED4);
} else if(state == 1) {
Battery_led_turn(LED1, show_power >= 1);
Battery_led_turn(LED2, show_power >= 2);
Battery_led_turn(LED3, show_power >= 3);
Battery_led_turn(LED4, show_power >= 4);
if(++show_power > 4) show_power = current_power;
}
}void Battery_led_update(uint8_t power) {
current_power = power;
}void Battery_led_stop() {
// 当前电量闪三次
for( uint8_t i = 0; i < 3; i++) {
// 关闭所有灯
Battery_led_turn_off(LED1);
Battery_led_turn_off(LED2);
Battery_led_turn_off(LED3);
Battery_led_turn_off(LED4);
delay_1ms(200);
// 根据当前电量闪灯
Battery_led_turn(LED1, current_power >= 1);
Battery_led_turn(LED2, current_power >= 2);
Battery_led_turn(LED3, current_power >= 3);
Battery_led_turn(LED4, current_power >= 4);
delay_1ms(200);
}state = 0;
} - @brief LED GPIO初始化
总结
在本文中,我们详细介绍了如何在资源有限的情况下设计一个BSP驱动来控制四个LED灯,以展示充电状态和电量百分比。我们首先定义了接口和驱动初始化函数,然后实现了业务逻辑,包括开始充电、更新电量、停止充电和LED灯闪烁。我们还设计了测试案例来验证我们的驱动功能是否按照预期工作。
通过采用模块化设计,我们能够确保代码的可复用性和可移植性。尽管在产品最终电路板还未完成的情况下,我们只有开发板可以使用,但我们通过创新的方法和细致的规划,成功地解决了这一挑战。我们相信,通过遵循这些最佳实践,我们能够在未来的项目中更加高效地工作,并为我们的团队和公司创造更大的价值。