PWM - PFM模式无缝转换的PFC变换器统一控制
摘要:断续导通模式通常应用在升压功率因数校正转换器中。这篇文章提出了一种基于虚拟阻抗原理的实现脉冲宽度调制控制和脉冲频率调制控制的统一控制方法。控制模式可以简单的通过只调整一个控制参数来改变。因此,在综合考虑电流纹波、开关频率和效率的情况下,变流器可以在变负荷情况下灵活运行。本文首先介绍了所提出统一控制方法的工作原理。然后,讨论了各种控制方式的运行条件。此外,分析了电流纹波、开关频率和功率损耗。最后,给出了稳态试验和负载切换试验的实验结果。在半负荷至满负荷范围内,变流器的效率均在95%以上。这些实验结果充分验证了所提出控制方法的有效性。
索引词:断续导通模式,功率因数校正,脉冲频率调制,脉冲宽度调制,统一控制方法。
Ⅰ.引言
随着越来越多的电力电子装备与电网相连,电能质量问题在全球范围内受到了更多的关注。为了减少电子装备造成的谐波污染,功率因数校正(PFC)广泛用于有效抑制电网谐波电流。由于其简单的拓扑和升压能力,升压功率因数校正转换器现已得到广泛应用。根据电感的导通状态,存在三种工作模式:对于升压功率因数校正转换器连续导通模式(CCM)、临界导通模式(CRM)和断续导通模式(DCM)。受益于连续的电感电流,连续导通模式适用于高功率因数和中等功率因数应用。然而,硬切换操作会影响系统效率。对于临界导通模式和断续导通模式,由于电感电流不连续,他们通常用于低功率因数应用。他们都实现了零电流开关,且避免二极管的反向恢复损耗。此外,为了获得更好的转换器性能,提出了混合或双模式控制方法。
在本研究中,讨论了断续导通模式升压功率因数校正转换器,提出了多种断续导通模式控制技术。这些控制技术大致可以分成脉冲频率调制(PFM)控制和脉冲宽度调制(PWM)控制。
PFM的主要思想是保持开关的导通时间或关断时间为常数,即通过调节开关频率来改变输出电压。PFM控制主要包含恒定导通时间,恒定关断时间或固定关断时间,以及迟滞控制。
相比于PFM控制,PWM控制由于其输入滤波器设计相对简单而得到了更多的关注。通过实时调整占空比,实现了正弦化电网电流和单位功率因数。在上世纪90年代,PWM策略应用于升压PFC转换器来改善电网电流质量。基于假设在一个开关周期内的平均电感电流与电网电压成正比,得到了占空比的表达式。然而,占空比的计算包含一个平方根,占用了数字处理器的大量资源。受早期数字处理器性能的限制,开发了一个模拟电路。为了简化电路的实现,进一步简化了占空比。此外,相比于恒占空比控制,实现了更低的输出电压纹波和更高的效率。姚等通过在输入电流中注入一个三次谐波(与基波电流相位相同)进一步简化了控制电路。与此同时,电流峰值和有效值降低。因此,直流滤波电容的尺寸可以减小。上述所有方法均使用模拟电路来实现控制。在文献21中,为了简化控制逻辑,提出了脉冲波控制策略。这不依赖于数字处理器的的运行速度,因此不需要昂贵的高速数字处理器。
本文提出了一种用于DCM升压PFC转换器的统一控制方法,其基于虚拟阻抗原理。其工作模式灵活,且能够通过改变一个开关控制参数来实现PWM模式和PFM模式之间的切换。因此,其呈现出较高的灵活度和广泛的应用性。此外,模式转换是无缝的,只在一个开关周期内完成。
本文后续的安排如下所示。在第Ⅱ节中,展现了所提出的对于DCM升压PFC转换器的统一控制方法。在第Ⅲ节中,展示了主电路的设计要素。在第Ⅳ节中,分析了电流纹波、开关频率和功率损耗。在第Ⅴ节中,分析了升压PFC转换器的实验结果。最后,第Ⅵ节对本文进行了总结。
Ⅱ.所提出的基于虚拟阻抗原则的统一控制方法
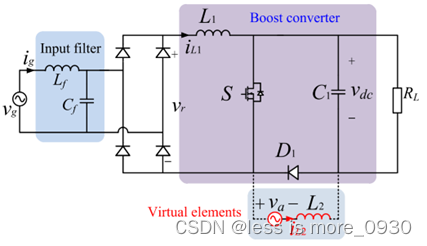
图1.增加虚拟元件后的升压PFC转换器
如图1所示,所提出的控制通过在原始的升压PFC转换器中增加一个虚拟元件来实现。虚拟电压源va 串联一个虚拟电感L 2,与此同时整体与输出二极管D1并联。
A.稳态分析
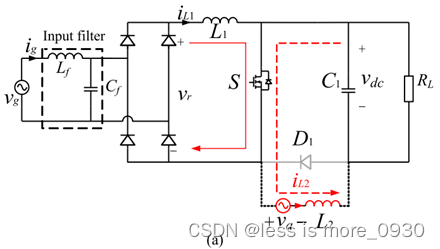
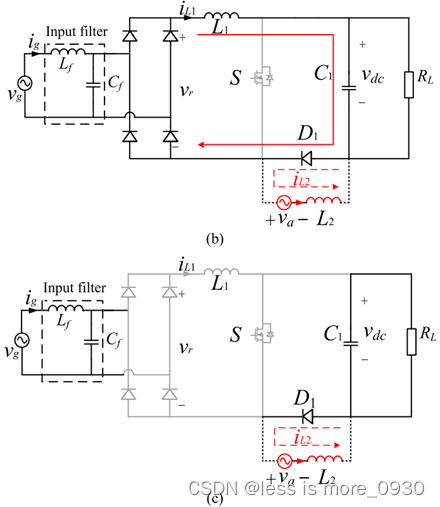
图2.工作阶段(a)阶段1:开关S 导通;(b)阶段2:开关S 关断且电感L1导通;
(c)阶段3:开关S 关断且电感L1闲置
如图2所示,根据电感电流iL 1的不同状态,存在三个工作阶段。电感电流iL 1的波形,虚拟电感电流iL2的波形以及开关驱动如图3所示。
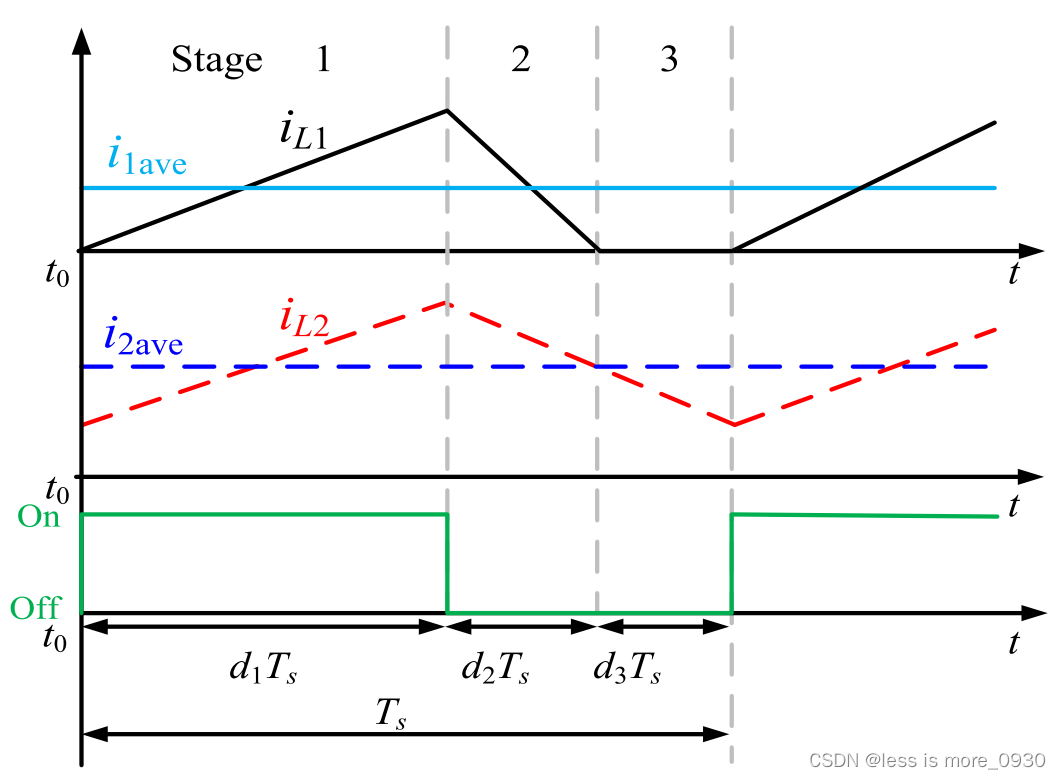
图3.电感电流iL 1,虚拟电感电流iL2以及开关驱动的波形
在阶段1,开关S 导通,电感电流iL 1增加,虚拟电感电流iL 2也增加。在阶段2,开关S 关断,iL 1和iL 2同时增加。在阶段3,开关S 仍保持关断,iL 1下降到零,iL 2也下降。状态i (i =1,2,3)的占空比定义为di。
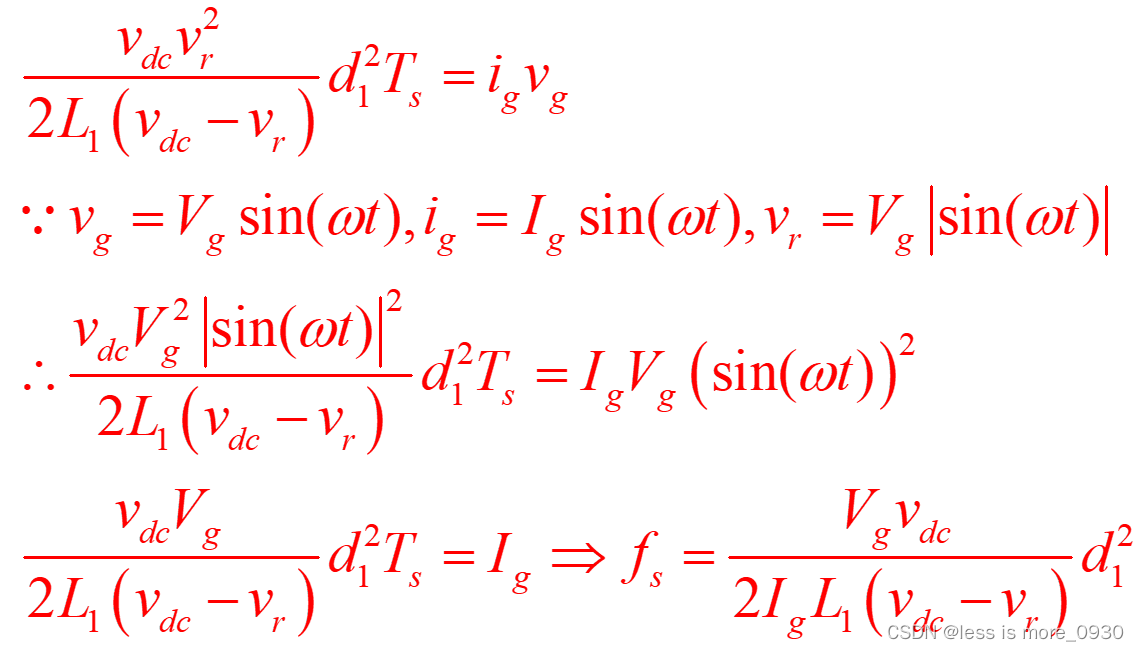
电网电压和电流定义如下:

其中Vg 和Ig 为电网电压和电流的峰值,且ω为电网电压的角频率。
根据电感L 1的伏秒平衡,占空比d 1和d 2的关系可以表示为(电感L 1只在子区间1和子区间2内存在电流,因此根据伏秒平衡可得vrd 1Ts -(vdc -vr )d 2Ts=0):

其中vdc 为直流输出电压,且vr =|vg |=Vg |sin(ωt)|为整流后的电网电压。
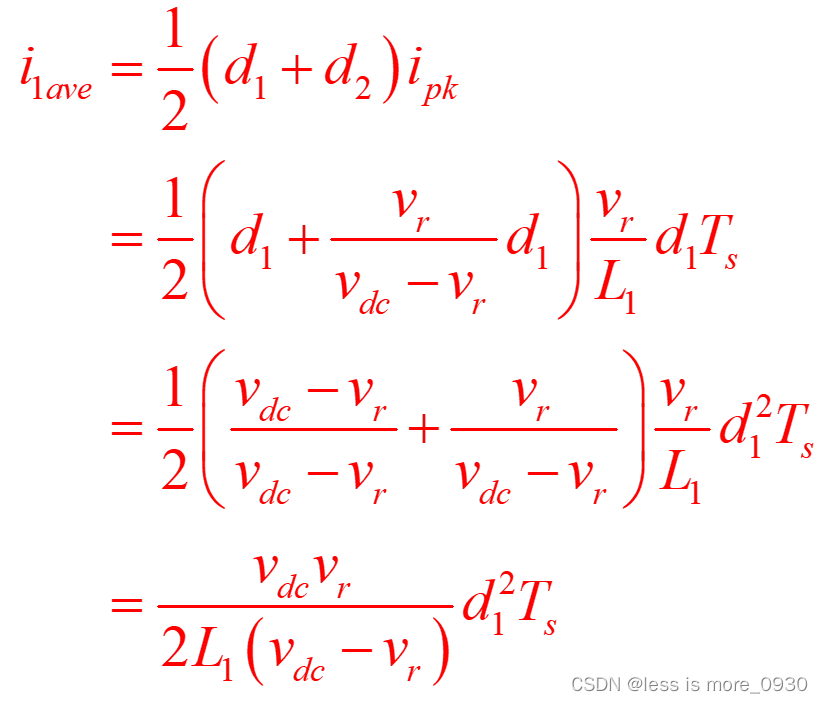
因此,电感L 1在一个开关周期内的平均值i 1ave 满足(电感L 1的电流在一个开关周期内的伏秒积除以开关周期,即为一个开关周期内的电感电流平均值):

电感L 1的峰值电流计算式为(在子区间1内电感电流上升的斜率为vr /L1,子区间1的时间间隔为d 1Ts ,电感L 1电流初值为0,因此峰值电流峰值为vrd 1Ts /L1):

将式(2)和式(4)代入式(3),可得:

输入功率pg可以表示为:

此外,pac 还满足(电网电压与电网的电流乘积,表示输入功率):

因此,求解式(6)和式(7)可得:

根据电感L 2的伏秒平衡,可获得如下所示公式(根据伏秒平衡可得d 1Ts (vdc -va ) - (d 2+d 3)Tsva =0→d 1Ts (vdc -va ) - (1 - d 1)Tsva =0→d 1(vdc -va ) - (1 - d 1)va =0→d 1(vdc -va ) = (1 - d 1)va→d 1 = va /vdc):

将式(9)带入式(8)可得:
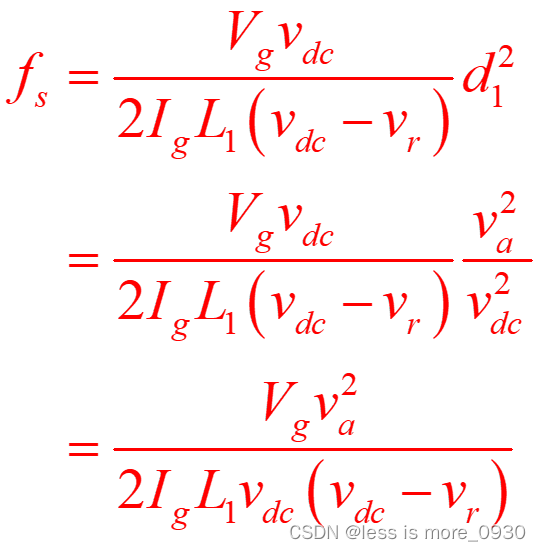

根据式(9)和式(10),va 是d 1和fs 的共享自由度。当转换器工作在PFM模式下,d 1需要是一个常数,这意味着va 也需要被设计成一个常数(Va )。然而,当转换器工作在PWM模式下时,fs 是一个常数,这表明va 2/(vdc -vr)这一项也是常数。最后,va被设计成:
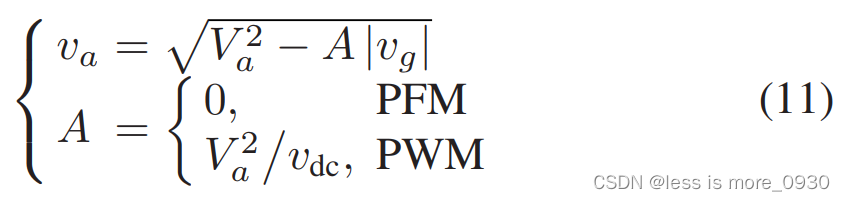
其中,Va为常数,将在下文中进行讨论。
因此,占空比d 1和开关频率fs满足:
A的值被设计为控制自由度,其值决定了转换器的工作模式。
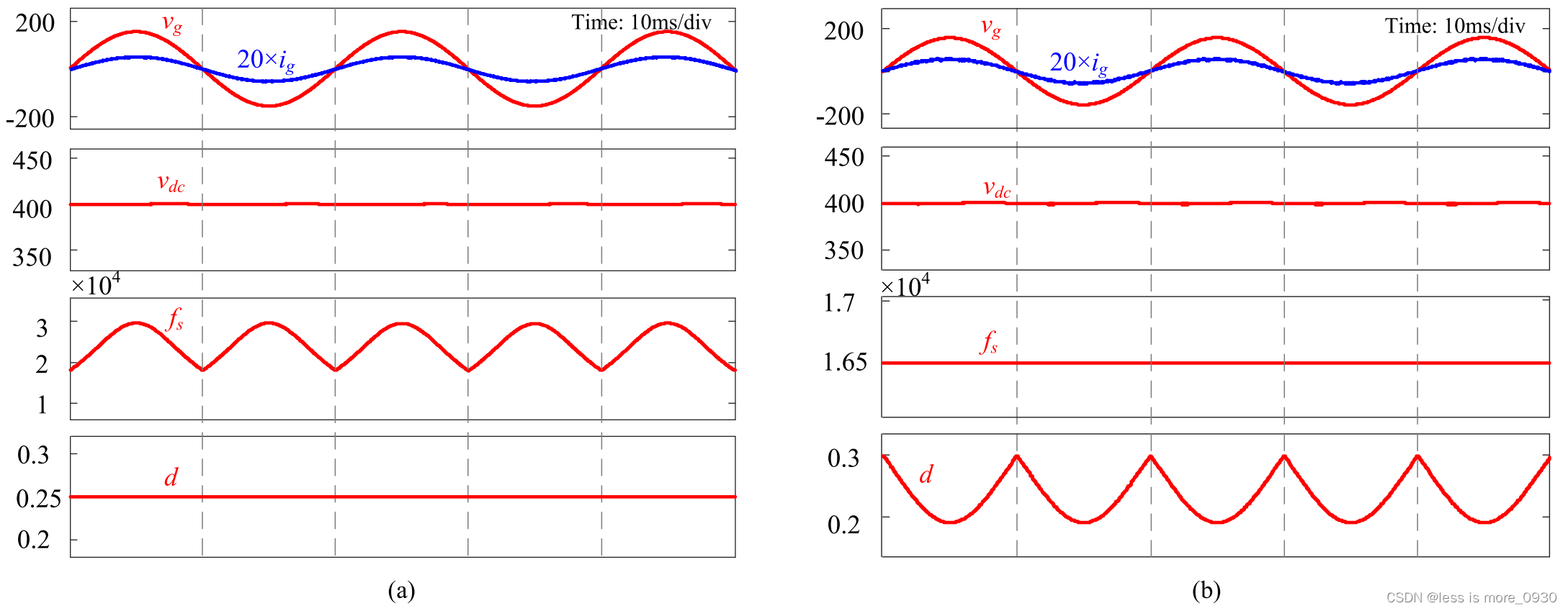
图4. 输入端口、输出端口、开关频率fs 和占空比d 1的模拟工作波形(a) A = 0;(b)A = Va 2 /vdc
图4给出了A = 0和A = Va 2 /vdc 时的输入端口、输出端口、开关频率fs 和占空比d 1的模拟工作波形。可以看出,当A = 0时,占空比d 1固定,开关频率fs 变化。当A = Va 2 /vdc 时,占空比d 1变化,开关频率fs 固定。还可以发现,运行模式之间的转换是无缝的,因为在控制程序开始时只需要修改参数A。
B.PI控制器的设计
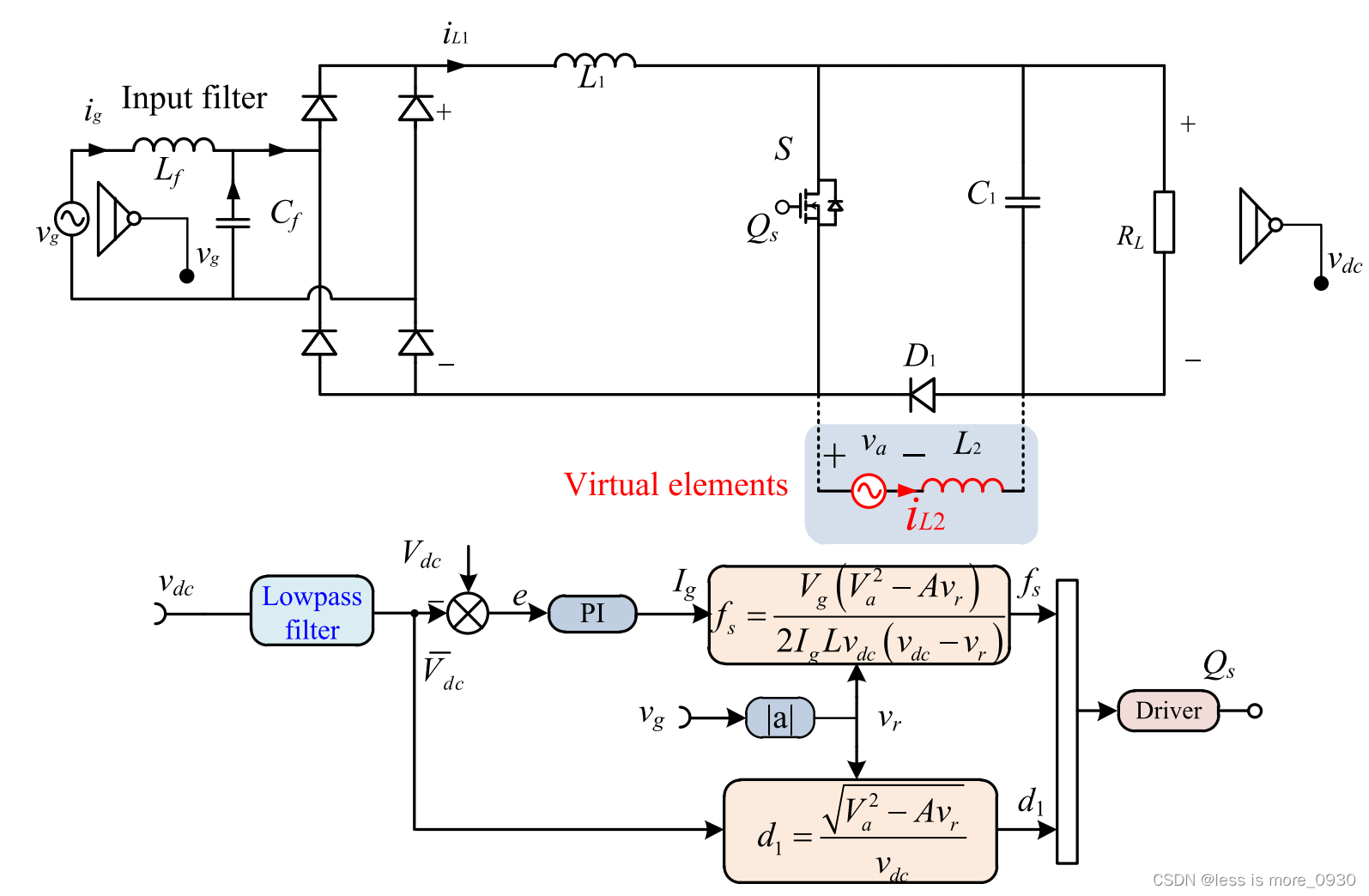
图5.控制方案框图
在提出的控制方法下,只需要一个简单的电压回路就可以达到控制目的。图5为单电压回路原理图。
该方法不同于以往以占空比为控制对象的控制方法。实质上是通过控制开关频率来实现PFC和输出电压稳定的功能。总体控制逻辑在下文中解释。
输出电压vdc 是通过调节输入有功电源pac 来调节的。当输入电压vg 确定后,输入功率只与输入电流ig 的峰值Ig 有关。因此,可以通过调节Ig 来控制输出电压。最后,有用功率的控制根据式(10)通过调整开关频率来实现。当平均值 达到其参考值时,Ig固定,且对应的开关频率达到稳态。
Ⅲ.设计要素
A.虚拟参数的设计
考虑升压PFC转换器工作在DCM模式下,d 1和d2之间的关系满足:

将式(2)和式(9)代入式(13)可得:

因此,虚拟电压va必须满足式(14)所示的条件。若电网电压有效值为110V,且输出电压稳定在400V左右,则虚拟电压满足:

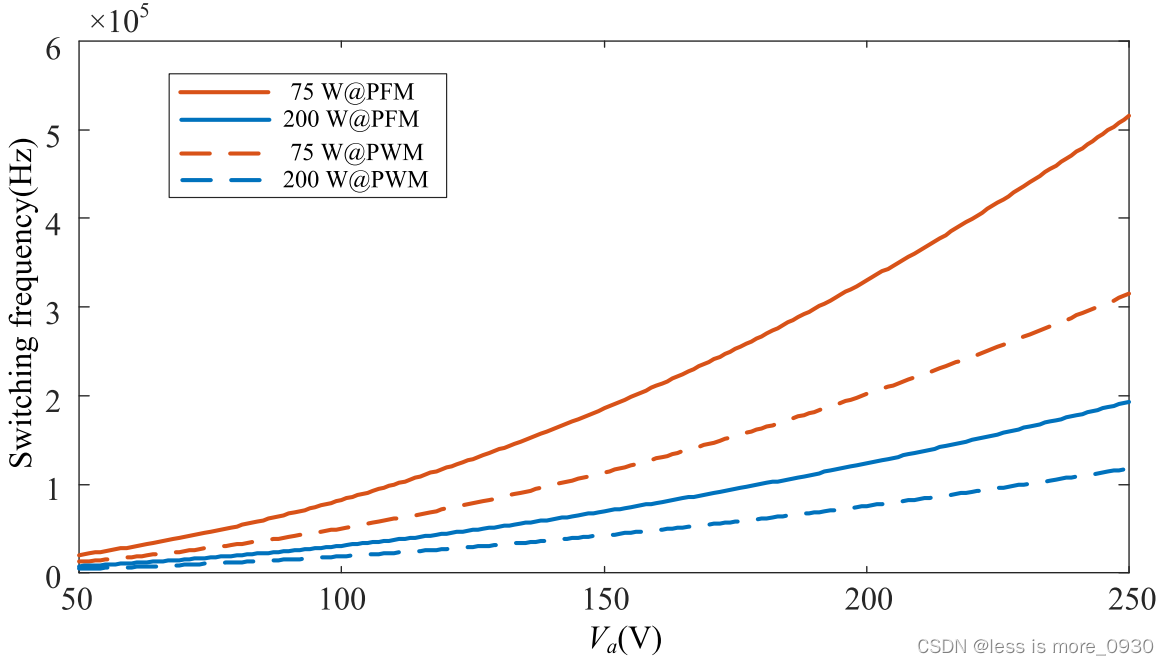
图6.最大开关频率与Va的关系
根据式(12),最大开关频率与Va 的关系如图6所示。能够发现在两个控制模式下,开关频率随着电压Va 增加而增加。此外,当Va 足够大时,上升率也变大。考虑本文所使用的参数和数字信号处理器(DSP)的性能,开关频率需要小于104kHz。因此,电压Va 需要小于200V。为了保证控制的精度,需要避免小占空比d (d = Va / vdc )。因此,电压Va需要为中等大小。在本文中,选择为100V。
为了确保电感电流iL 2连续,其平均值iL 2_ave需要满足:

其中,∆iL 2是电感电流iL 2在一个开关周期内的变化量。∆iL2可以表示为:

因此,电感L2需要满足:

B.电路参数的设计
1)设计输入LC 滤波器:因为转换器工作在DCM模式下,输入电流包含大量开关纹波。为了减少转换器对电网的影响,在输入侧需要添加LC 滤波器。然而,LC滤波器会导致输入电压和输入电流相位不同,这将会降低转换器实现的功率因数。因此,有必要全面的考虑输入滤波器的设计。
LC滤波器导致的输入电压和输入电流相位不同可以从文献22中得到:

其中,ω 为电网电压的角频率,ff 为LC滤波器的截止频率,其满足:

因此,当转换器的输入达到单位功率因数时,实际的功率因数(PF)为:

根据式(19),功率因数与输入滤波器的截止频率ff ,滤波电容值Cf 有关。当功率因数被设计成0.999且截止频率为2kHz时,可以计算出滤波电容值Cf 为2.2μF。然后,滤波电感值可以选择为2mH。
2)确定电容C 1:根据式(1),输入功率Pg可以表示为:

其中,Po =VgIg/2。
如果输出电压是个常数,则输出功率Pdc满足:

如果不考虑转换器的功率损耗,输出功率等于平均输入功率,即(Pg 为电网的瞬时功率,Tg为电网周期):

其中,Tg 为电网周期,因此,纹波功率全部被输出侧电容C1吸收。因此:

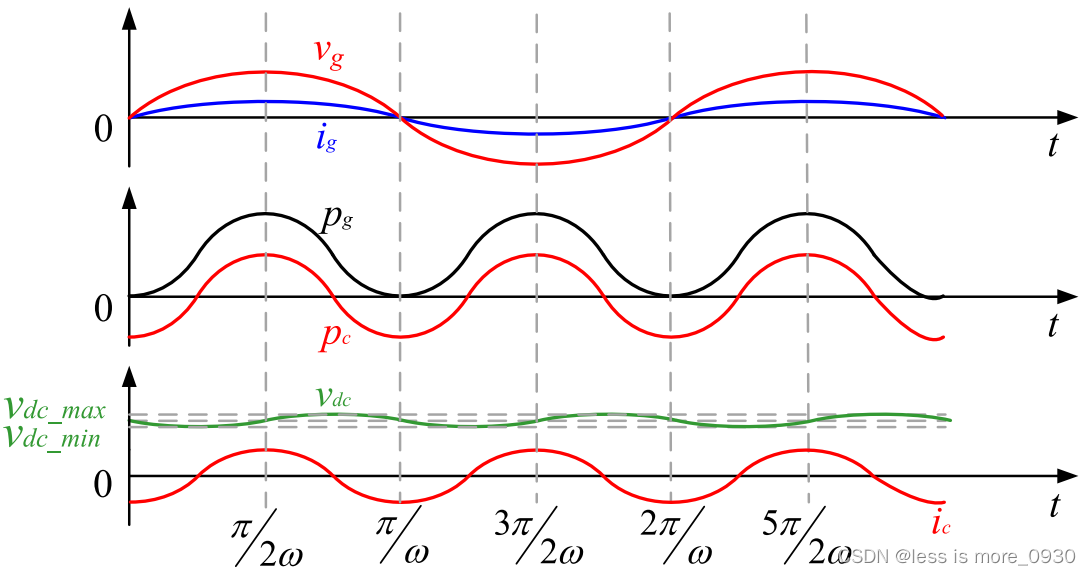
图7.二次脉动功率的主要波形
主要波形如图7所示。在一个充电周期中,电容器吸收的能量ΔE可表示为:

能量ΔE还需要满足:

结合式(26)和式(27)可得:
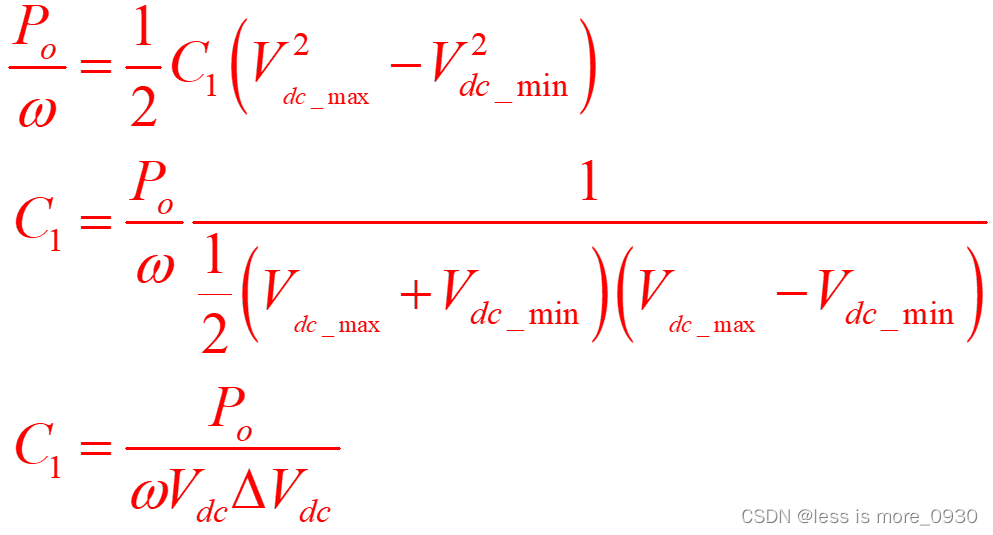

其中ΔVdc =V dc_max-V dc_min。根据式(28),电容值直接与输出功率Po 成正比,且反比于输出电压纹波。当最大输出功率设置为200W,电压纹波ΔVdc 为1%Vdc ,平均输出电压Vdc 为400V时,则电容C 1选取为500μF。
Ⅳ.电流纹波、开关频率和功率损耗的分析
A.电感电流纹波
电感电流的峰值包络线表示为式(4)。将式(8)、式(9)、式(11)代入式(4)得到:
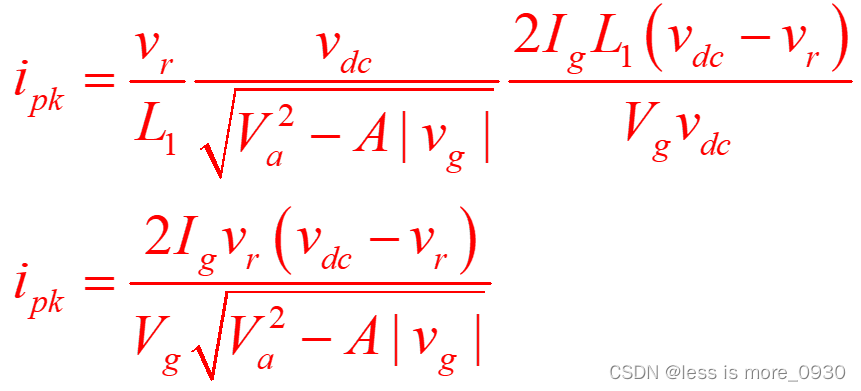

因为峰值电流ipk 以两倍的电网频率变化,所以在半个工频周期内ipk 有一个极值点。对式(29)求导可以得到极值点为t =Tg/4。因此,在一个电网周期内最大电流应力可以表示为:

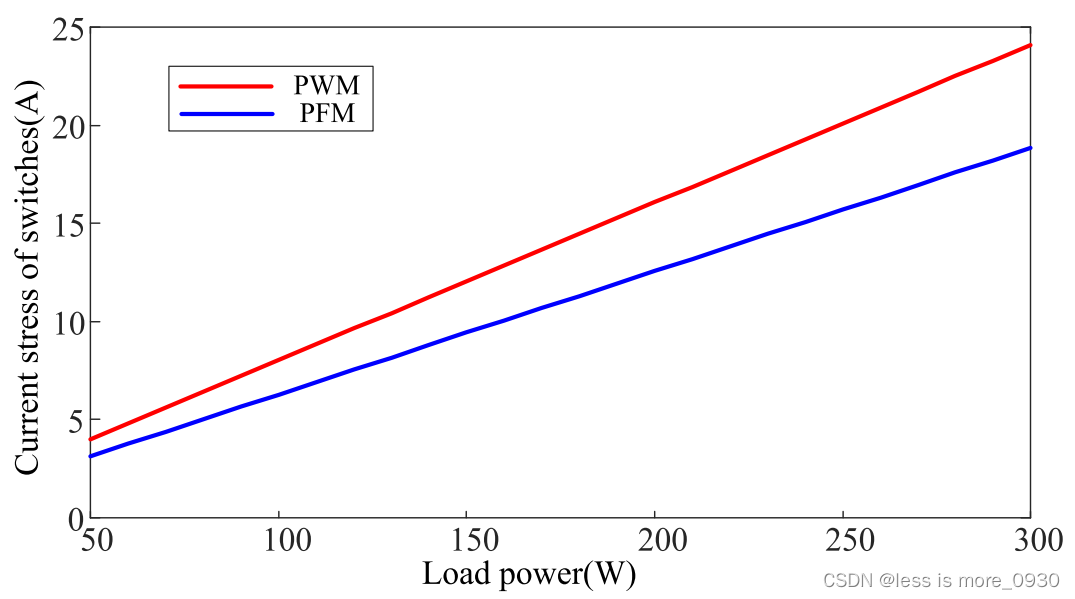
图8.电压应力与负载功率的关系曲线
根据本文使用的参数,电流应力与负载功率的关系曲线如图8所示。可以发现对于两种控制方式,电流应力都与负载功率成正相关。并且PWM控制中的电流应力总是大于PFM控制中的电流应力。
B.开关频率
根据式(24),开关频率fs也可以表示为:


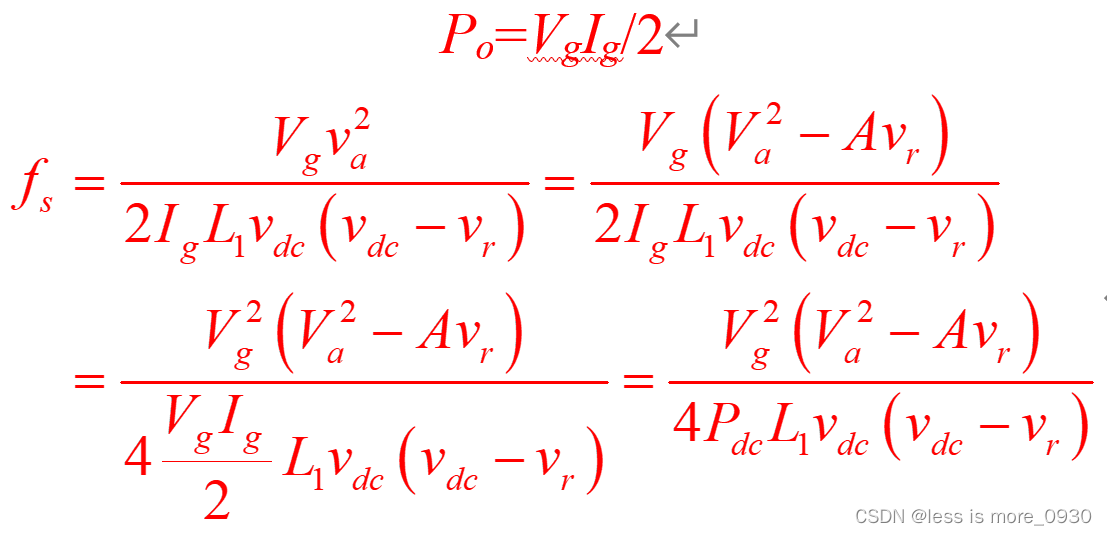

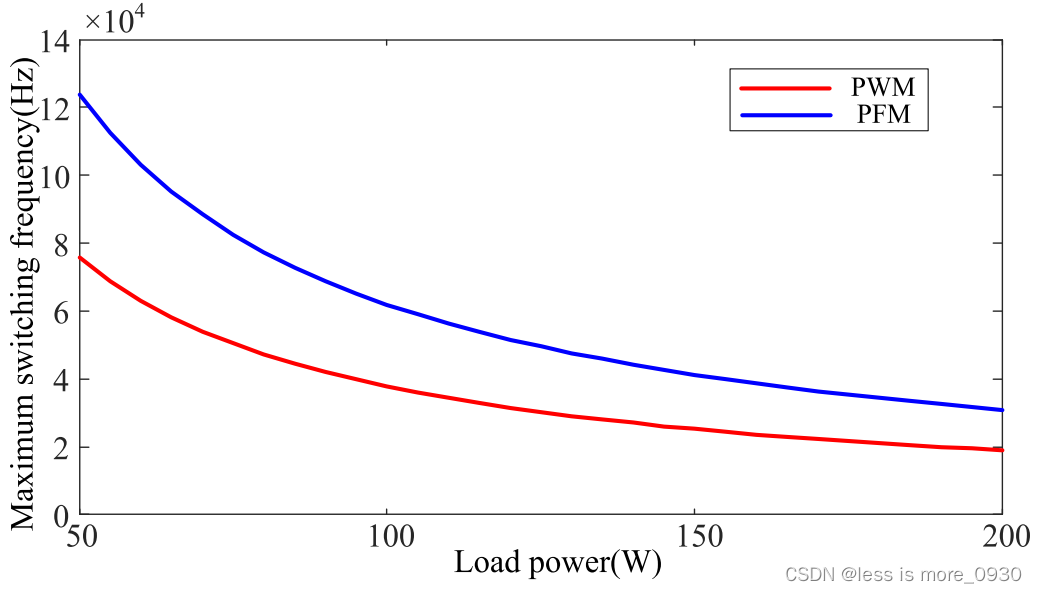
图9.最大开关频率与负载功率Pdc的关系曲线
则不同负载下的最大开关频率如图9所示。可以发现,对于两种控制模式,开关频率与负载功率呈负相关。PFM控制的开关频率约为PWM控制的3/2倍。
C.损耗分析
整个转换器的主要损耗源主要包括电感、主开关、续流二极管和整流二极管。
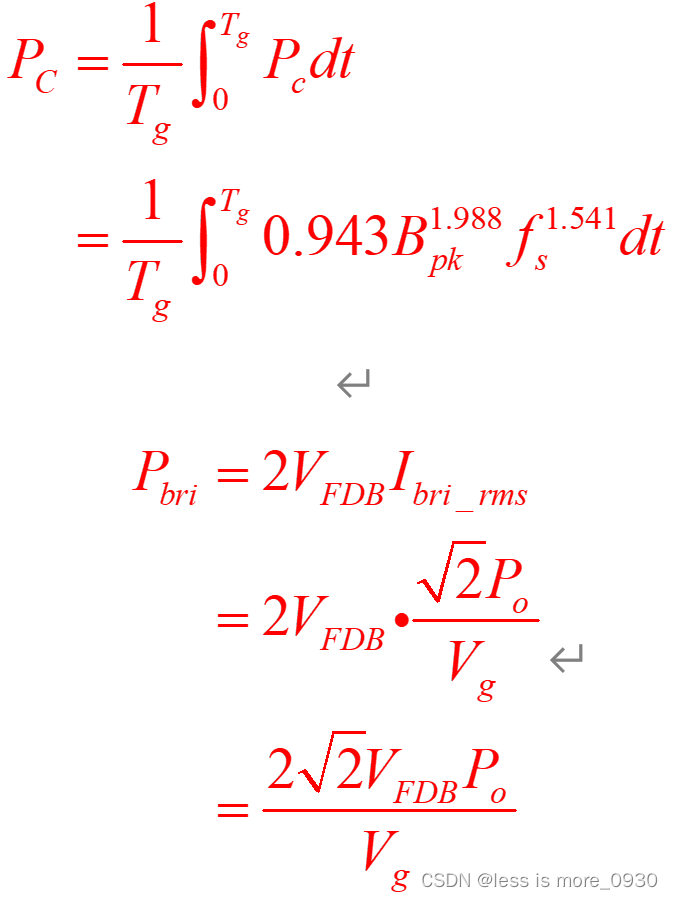
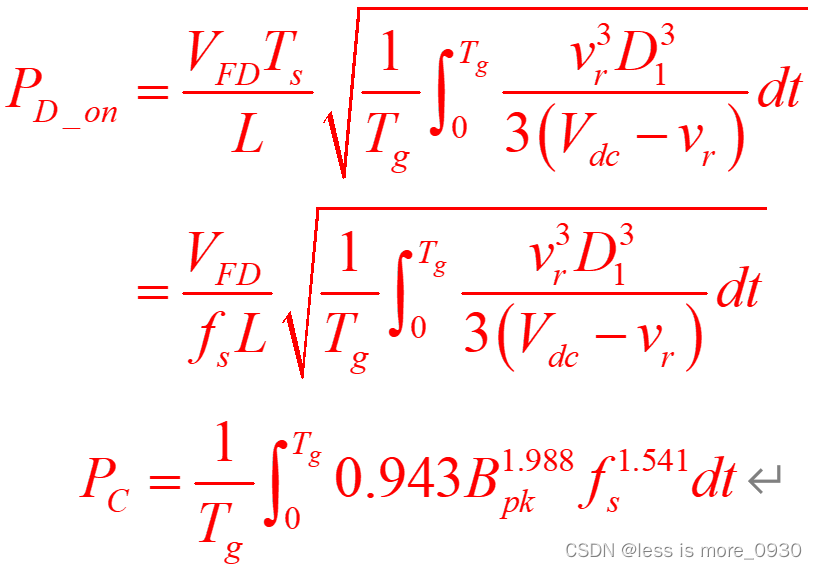
对于电感的损耗,有铁耗和铜耗。对于实时磁芯损耗,可以表示为:

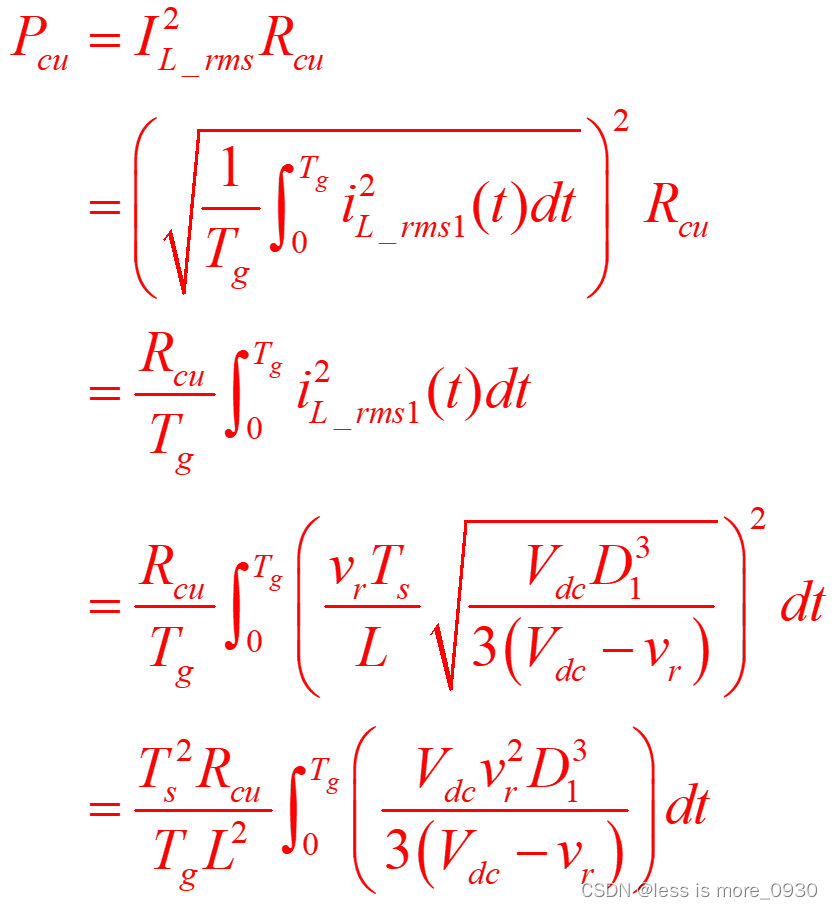
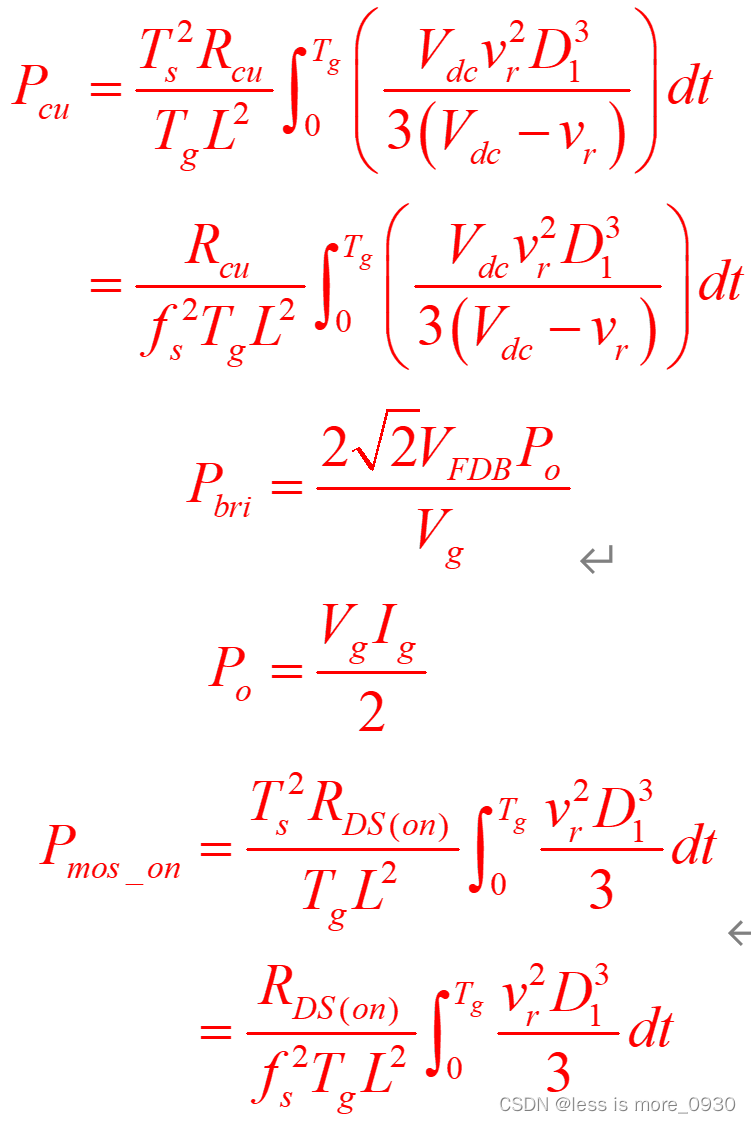
对于铜耗,其满足:

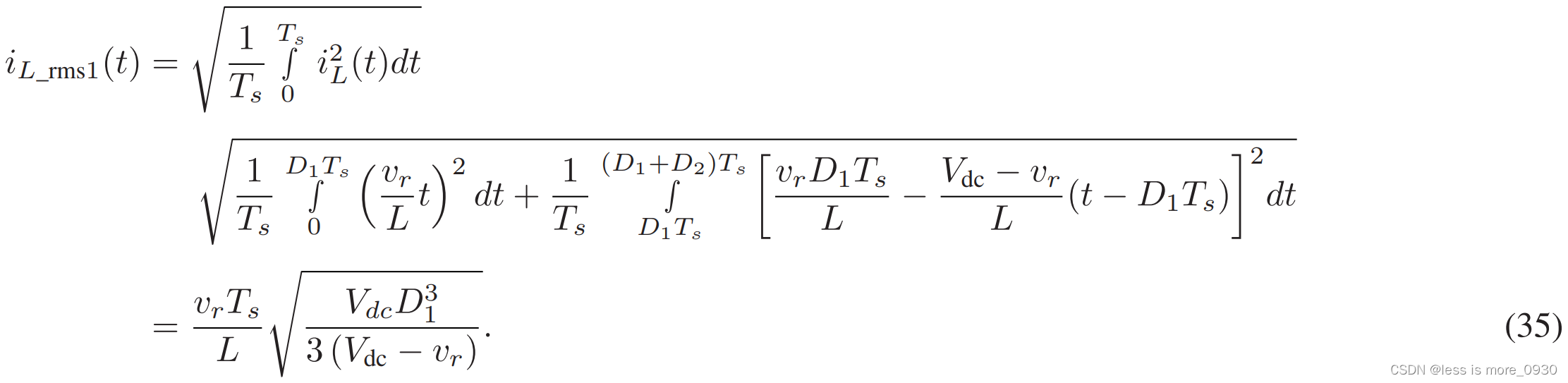
其中,Rcu 为电感线圈的导通阻值;IL _rms为电感电流在一个电网周期内的有效值,且表达式为:

其中,iL _rms1为电感电流在一个开关周期内的有效值,且满足在本页下方的式(35):
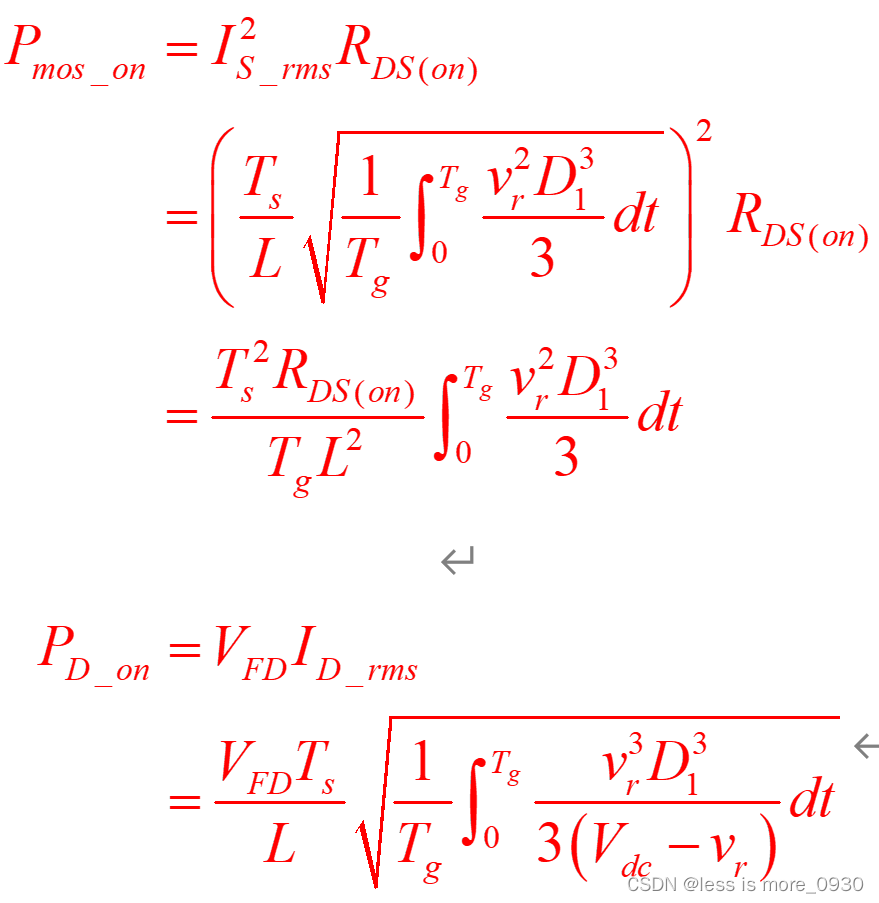
对于主开关的损耗,主要包含开关损耗Psw 和导通损耗Pmos_on 。在DCM工作模式下,忽略开关开通损耗。假定开关关断损耗较小,此处只考虑导通损耗Pmos_on,其表示为:

其中,RDS (on )为主开关S 的导通电阻,IS_rms为主开关电流在一个电网周期内的有效值,其表达式为:

其中iS_rms1表示主开关电流在一个开关周期内的有效值。
对于续流二极管的损耗,在DCM模式下,此处没有反向恢复损耗,只考虑通态损耗PD_on:

其中,VFD 为续流二极管D 1的正向压降,ID_rms为续流二极管在一个电网周期内的有效值,其表达式为:

式中ID_rms1为一个开关周期内续流电流的均方根值。
考虑整流二极管Pbri的损耗,可以表示为:
因为在同一瞬间,有两个二极管同时导通,所有需要乘以2。

其中,Ibri_rms 为整流二极管的电流有效值,其等于输入电流的有效值。VFDB 为整流二极管的正向压降。因此:

总而言之,各损耗的理论值总结如表I所示。
表I.各损耗的理论计算值
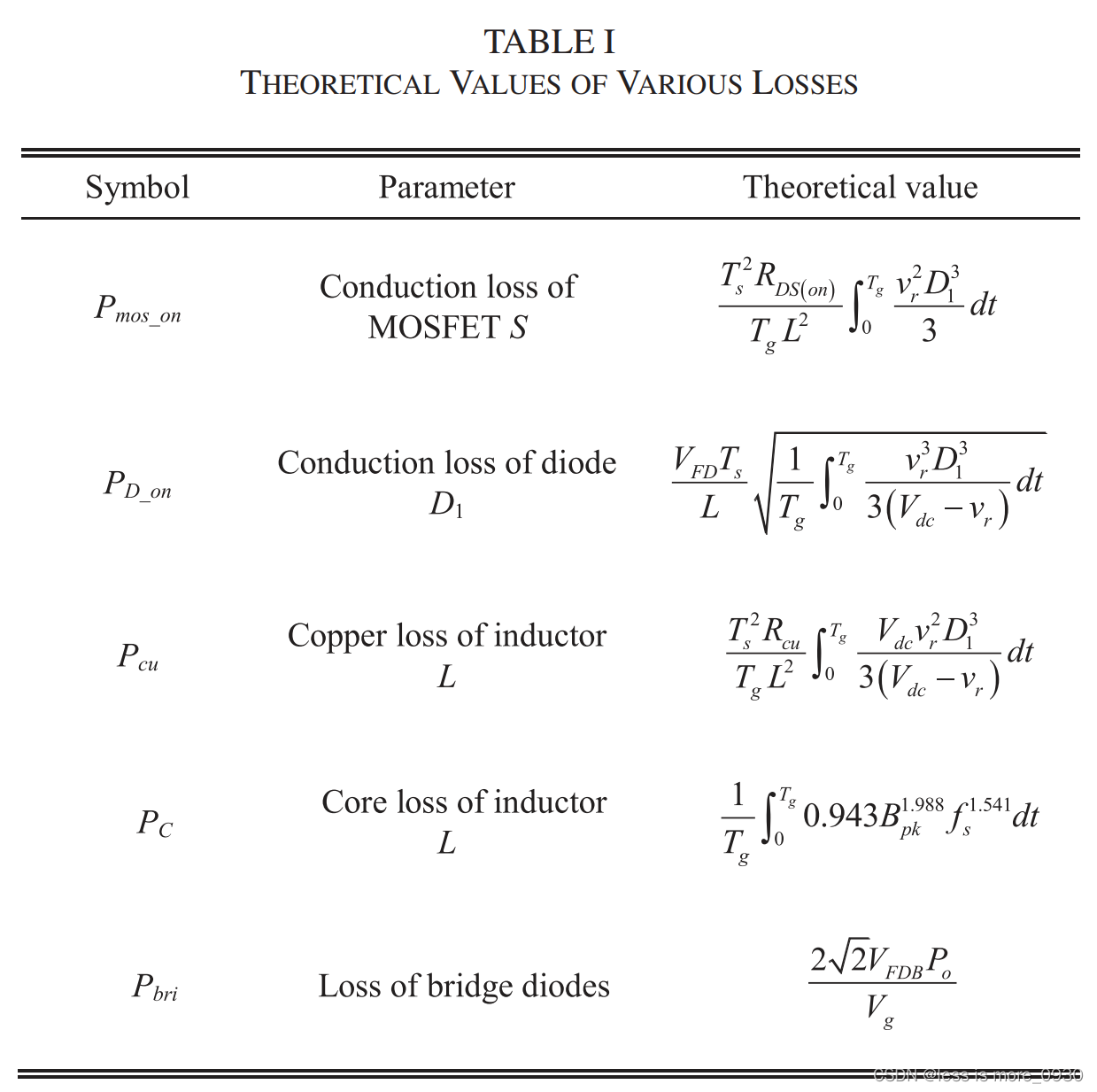
根据如表I所示的理论值结果,可以得到开关频率越高,损耗(Pcu 、Pbri 、Pmos_on 和PD_on )越低的结论。相反的是,如果Bpk 为一个常数,随着开关频率升高,铁芯损耗PC也会升高。
表Ⅱ.实验参数
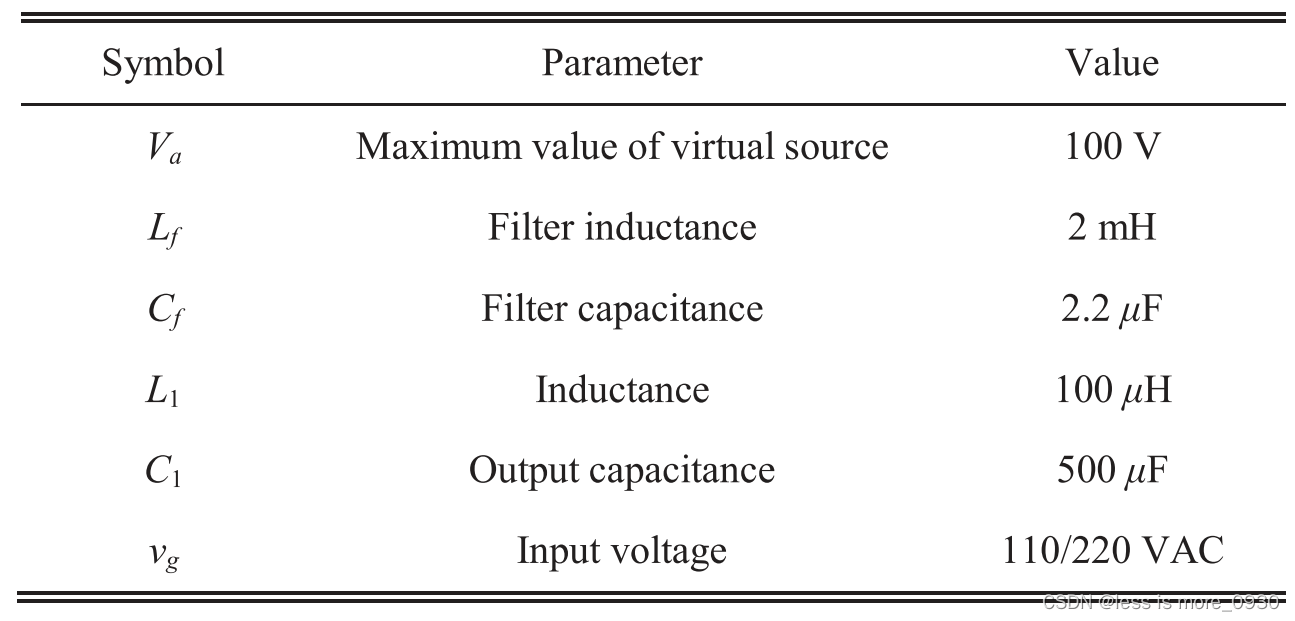
图10.PFM和PWM模式下的功率损耗击穿
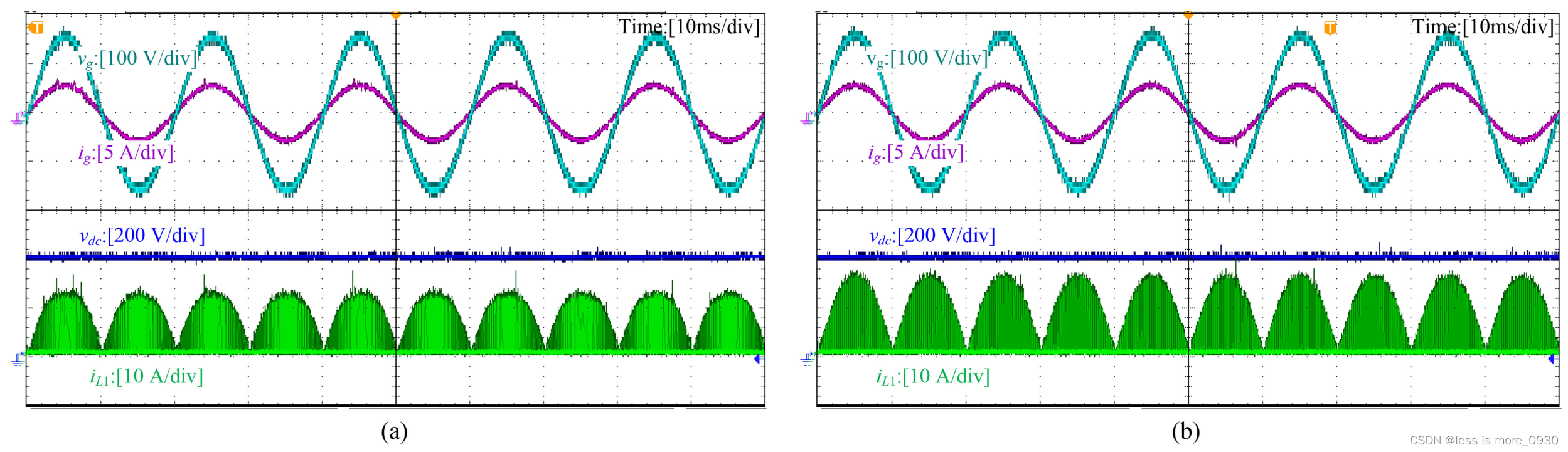
图11.200W时稳态波形(a)PFM控制;(b)PWM控制;
图11为满载时电感电流iL 、输出电压vdc 、输入电压vg 、输入电流ig 的实验波形。如图所示,在PFM控制下的电感电流iL 比PWM控制下的电感电流iL 要小。这与第四节所述的基本一致。并且无论采用哪种控制方式,输出电压vdc 都能很好地控制在400V,波动很小(Δvdc ≈1%Vdc)。
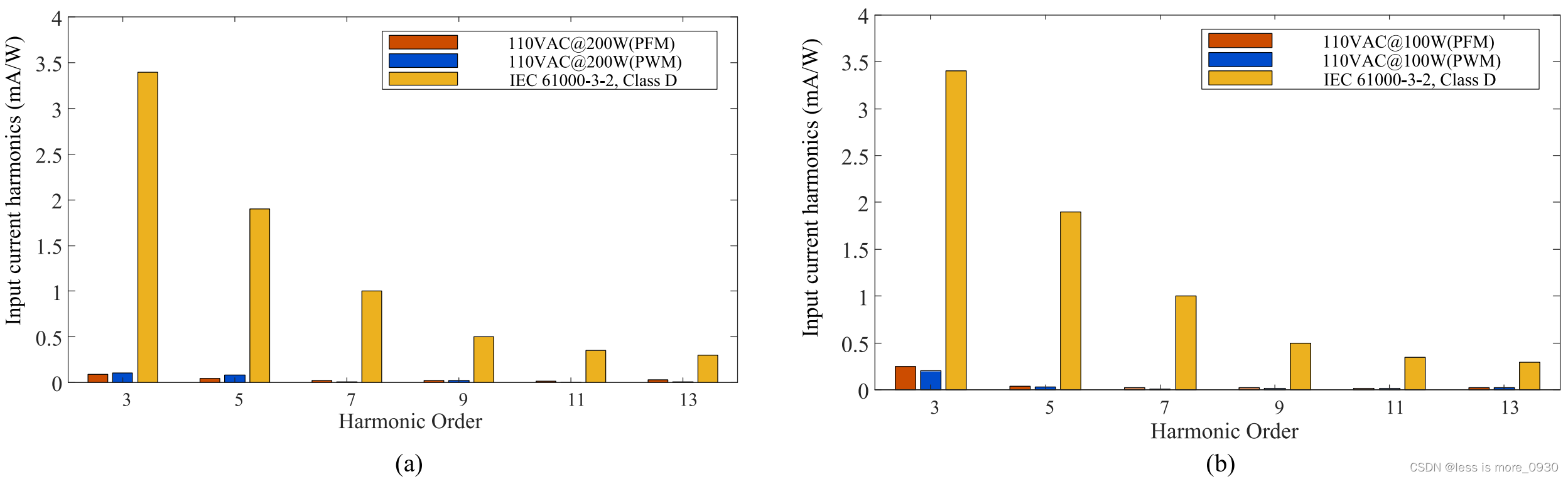
图12.输入电流ig与IEC 61000-3-2 D类的谐波分量对比(a)200W时;(b)100W时;
图12显示了输入电流ig在100W和200W时与IEC 61000-3-2 D类的谐波分量对比。可见,所有谐波分量均满足IEC61000-3-2 D类标准。当输出功率为200W时,PFM和PWM的总谐波畸变(THDs)分别为2.66%和2.83%。
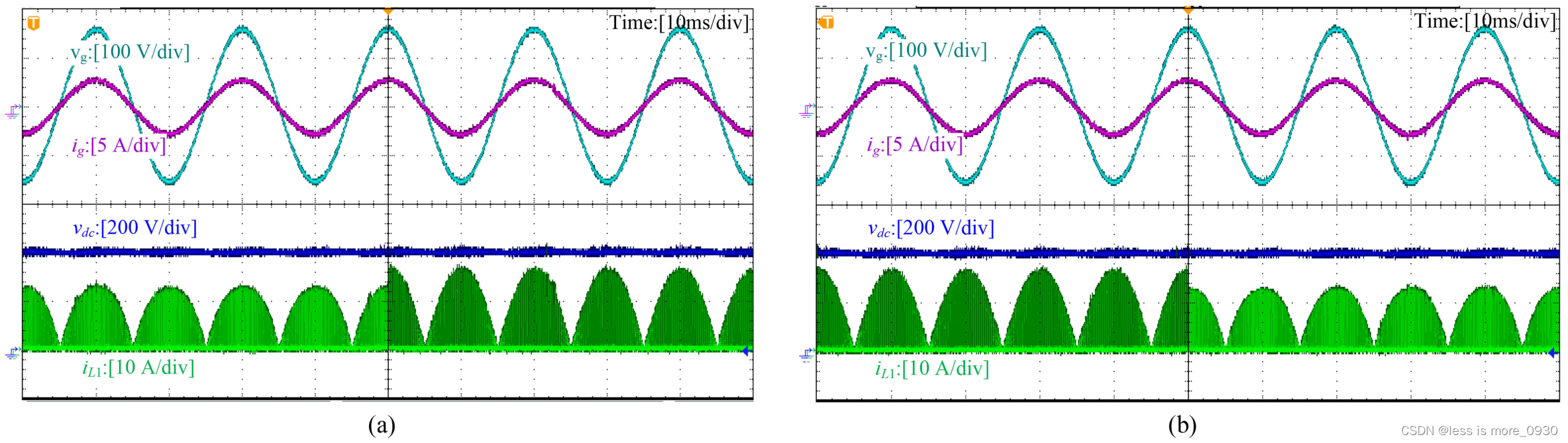
图13.控制模式在π/2处切换波形(a)PFM控制切换到PWM控制;(b)PWM控制切换到PFM控制
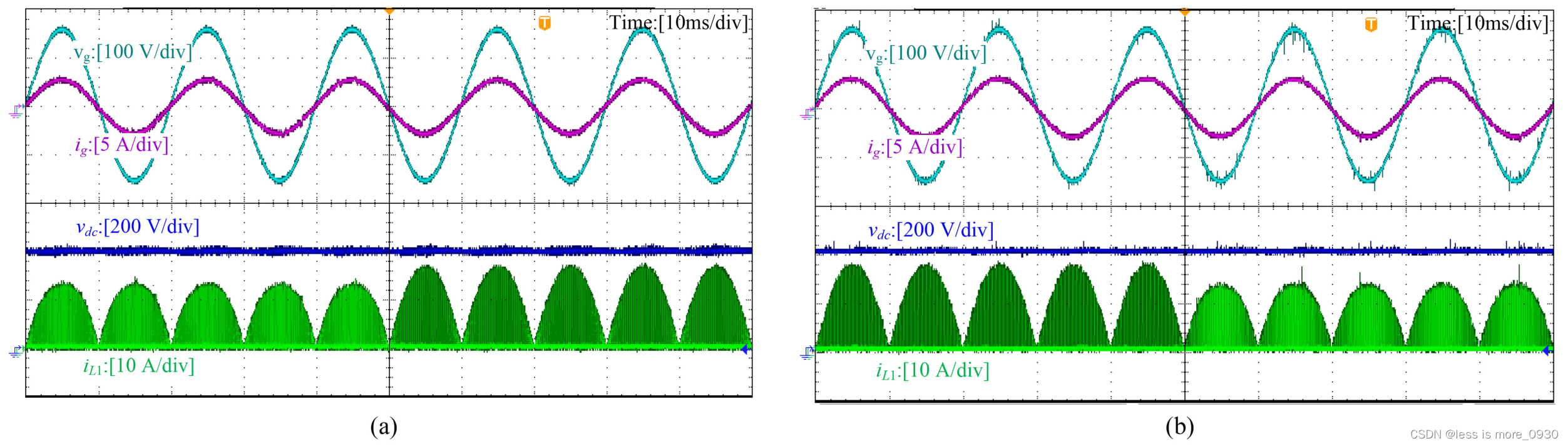
图14.控制模式在π处切换波形(a)PFM控制切换到PWM控制;(b)PWM控制切换到PFM控制
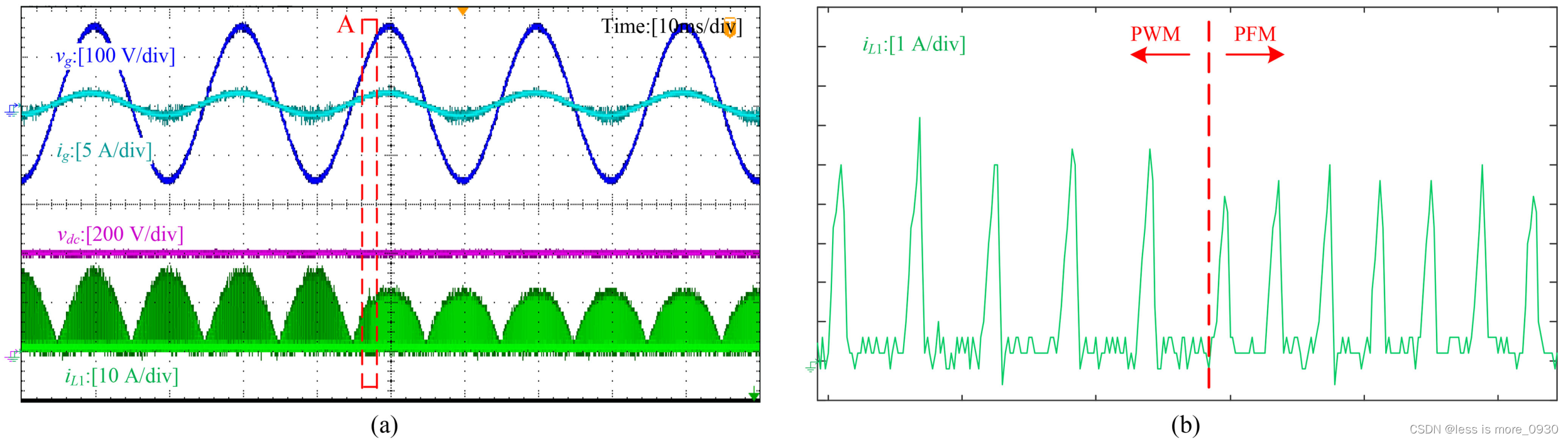
图15.控制模式任意时间切换波形(a)PFM控制切换到PWM控制(b)PWM控制切换到PFM控制
为了验证所提方法的灵活性,在π/2、π和随机时间切换两种控制模式。图13-15为开关过程波形图。如图所示,输入电流ig 和输出电压vdc上没有波动。从图15(b)的放大视图也可以发现,模式转换在一个开关周期内完成。
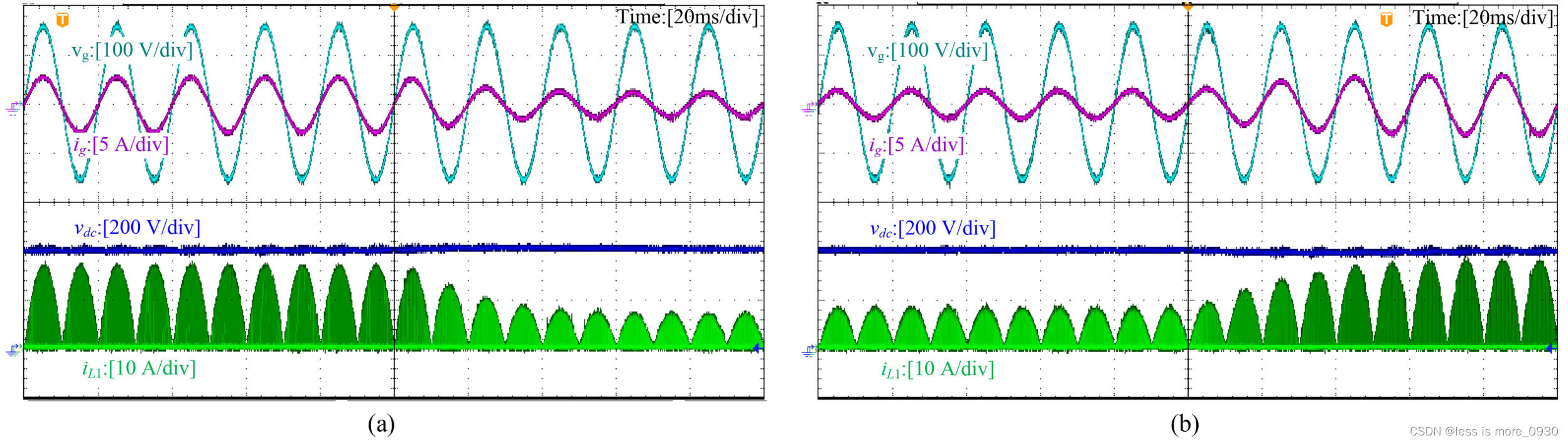
图16.PWM控制模式下输出功率变化时的波形(a)200W切换到100W;(b)100W切换到200W;
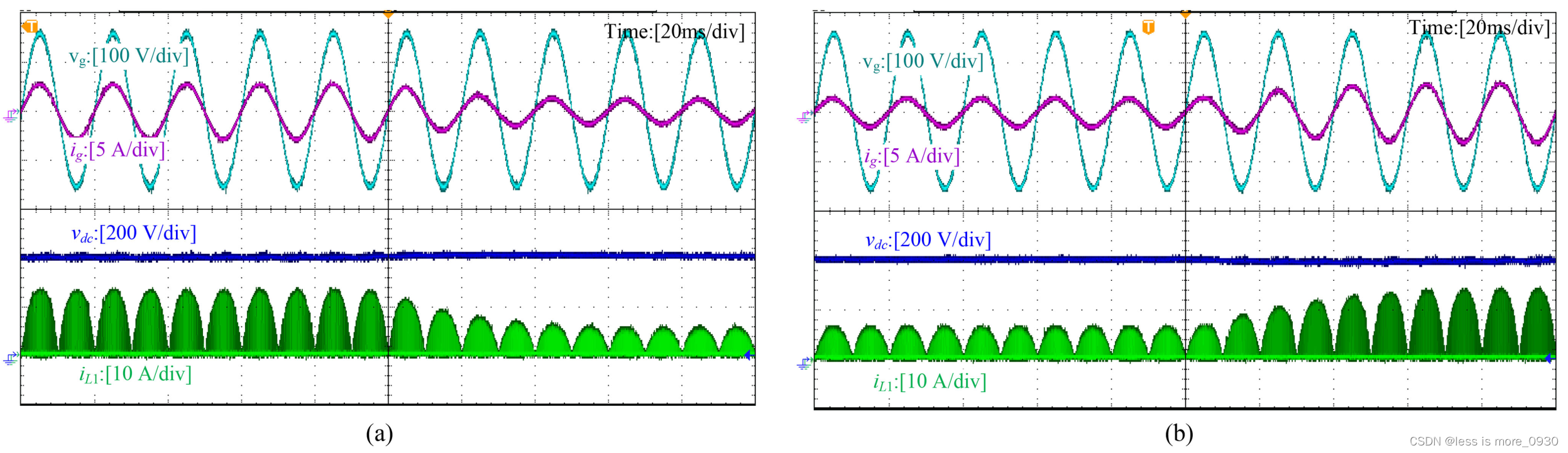
图17.PFM控制模式下输出功率变化时的波形(a)200W切换到100W;(b)100W切换到200W;
图16和图17为负载突变时的瞬态过程。由图可知,整个暂态过程可以在两个电网周期内完成,且输出电压保持稳定。因此,转换器在输出功率变化下具有快速的瞬态响应。
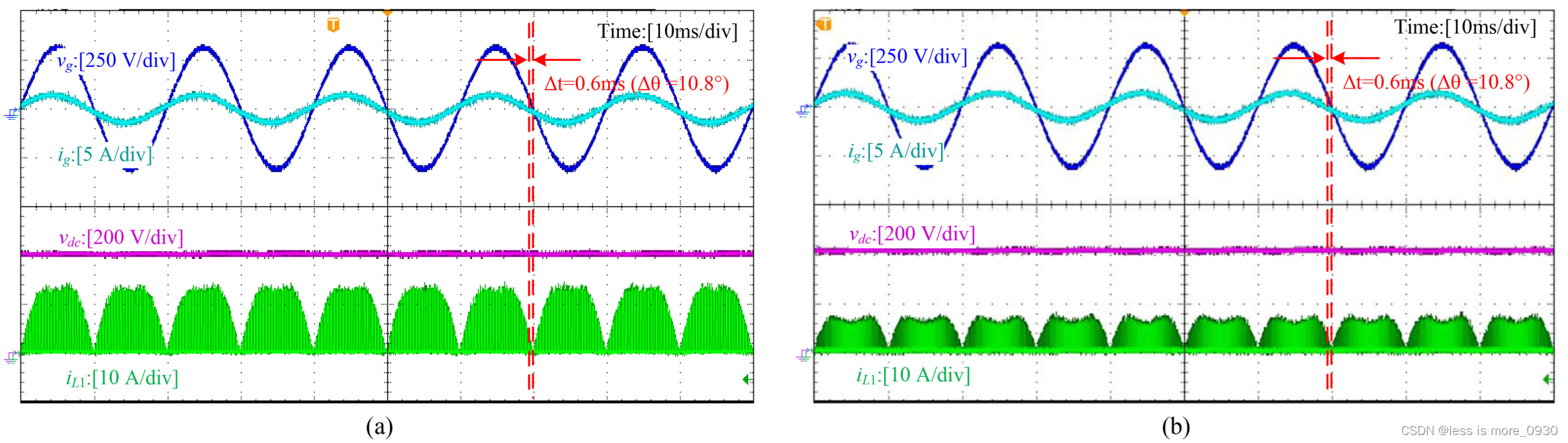
图18.在220VAC输入200W功率下的稳态波形(a)PWM控制;(b)PFM控制;
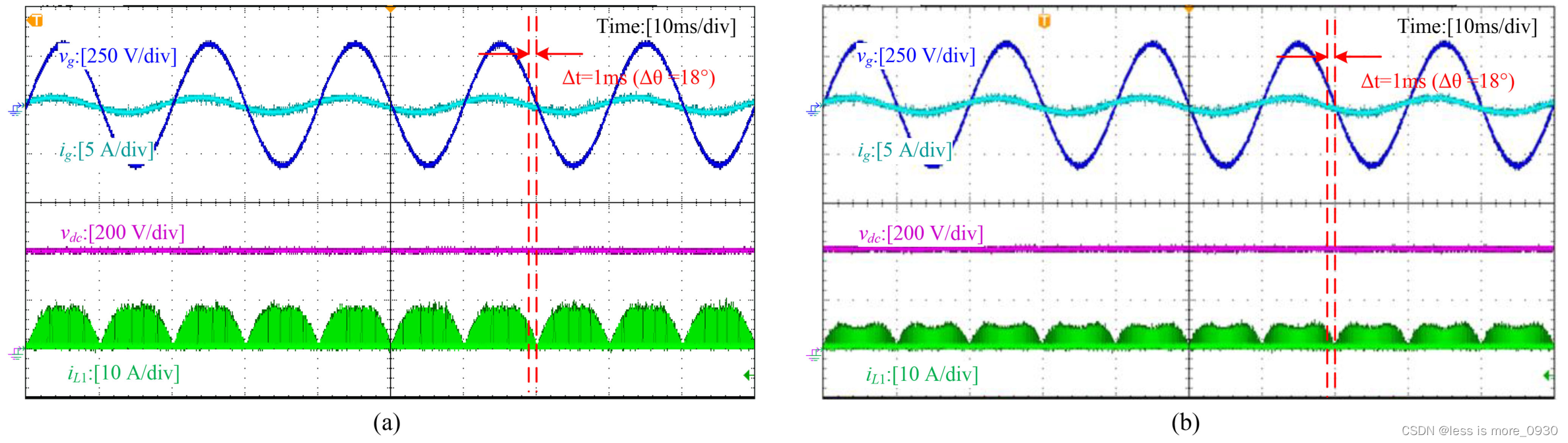
图19.在220VAC输入100W功率下的稳态波形(a)PWM控制;(b)PFM控制;
图18和图19为220VAC输入电压下的实验结果。在两种控制模式下,PF均为0.951@100W/0.982@200W。与110 VAC下的相比,PF降低。然而,输出电压仍然稳定在400V,波动很小(Δvdc ≈1%Vdc)。
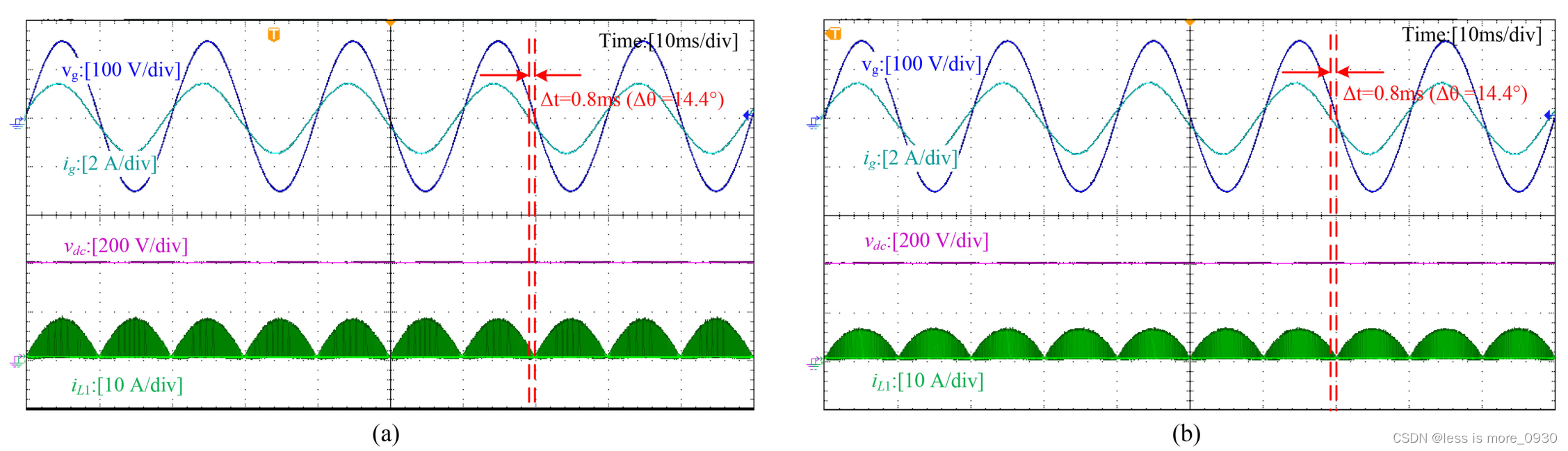
图20.在110VAC输入100W功率下的稳态波形(Lf =2mH,Cf =6.6μF)(a)PWM控制;(b)PFM控制
为了证明滤波器的影响,改变滤波器参数(Lf =2mH,Cf =6.6μF)且对应的实验结果如图20所示。由图可知,相位差为14.4°,即PF=0.968,其与理论结果一致(14.4°,即PF=0.97)。
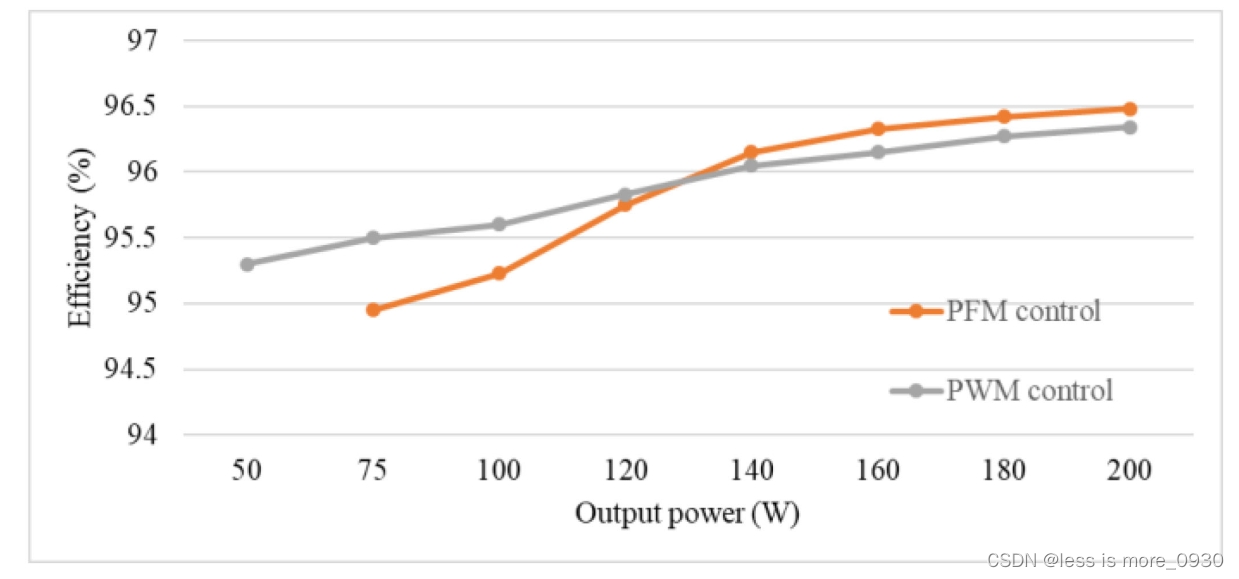
图21.系统效率曲线
图21显示了两种不同控制模式下的效率曲线。考虑到电路的电阻,实验结果与
图10基本一致。对于PFM控制方式,在低负载功率下(如为59 W),开关频率会很高(104.8 kHz),DSP很难实现控制。因此,PFM的效率曲线覆盖75-200W。
Ⅵ结论
本文提出了一种具有在PWM/PFM模式之间无缝转换的升压PFC变换器的统一控制方法。该方法将PFM控制和PWM控制相结合,可以根据不同的负载情况灵活切换到不同的控制模式。此外,还可以保证变流器更好的控制性能和暂态性能。为了验证该方法的有效性,搭建了额定功率为200W的实验平台。实验结果证明了控制方法的合理性,得到了稳定的输出电压,电网电流满足IEC 61000-3-2 D类标准。
参考文献:1Yonglu Liu, Haojie Zhang, Hui Wang, Guo Xu, Fulin Liu, "A Unified Control for PFC Converter with Seamless Transition Between PWM/PFM Modes," IEEE Transactions on Power Electronics, vol.PP,no,99,pp.1-1.
本文章仅用于本人学习作用,文中黑色部分为原文翻译,红色部分为本人学习过程中的一些笔记,才疏学浅,如有错误欢迎批评指正。