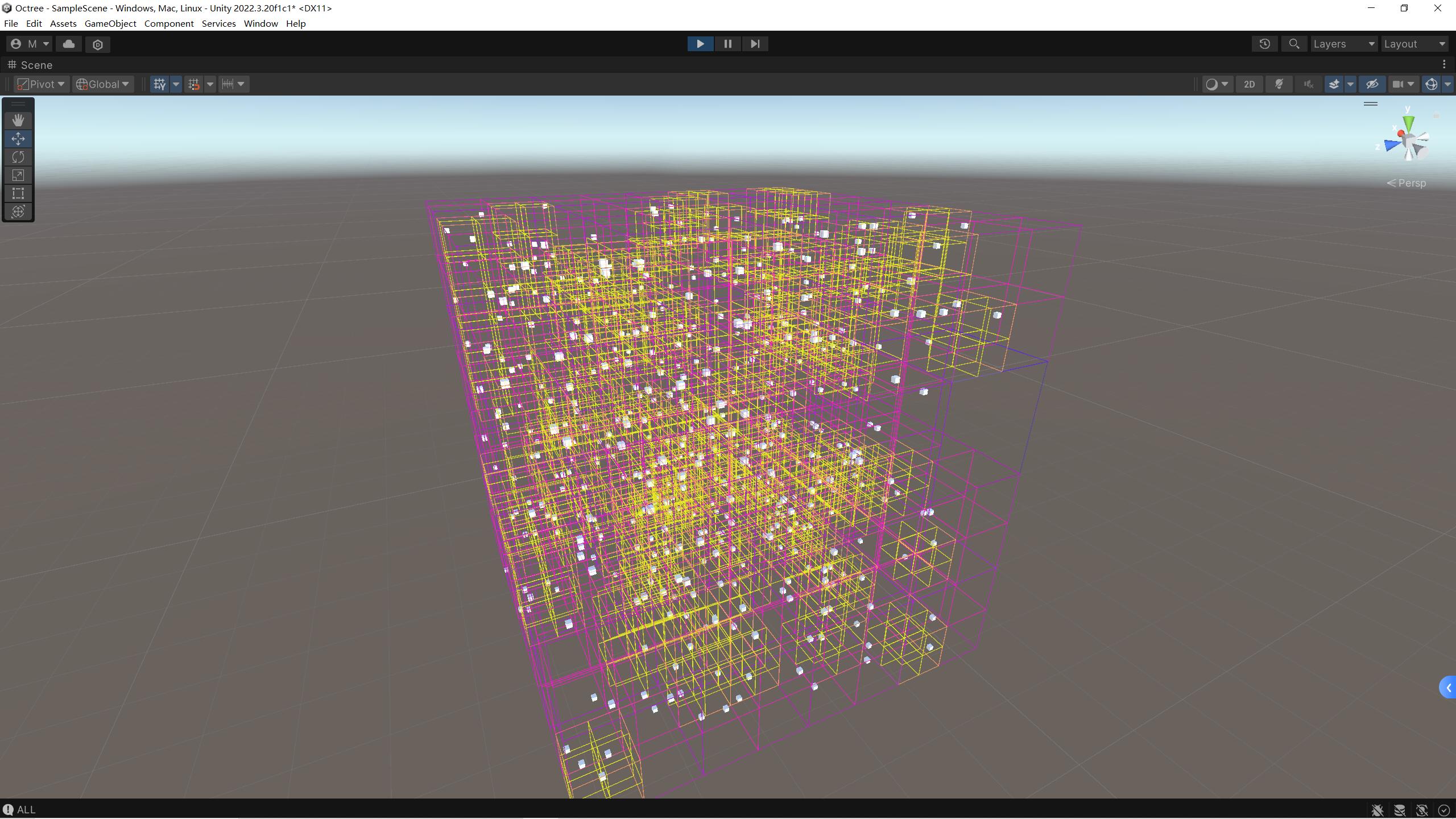
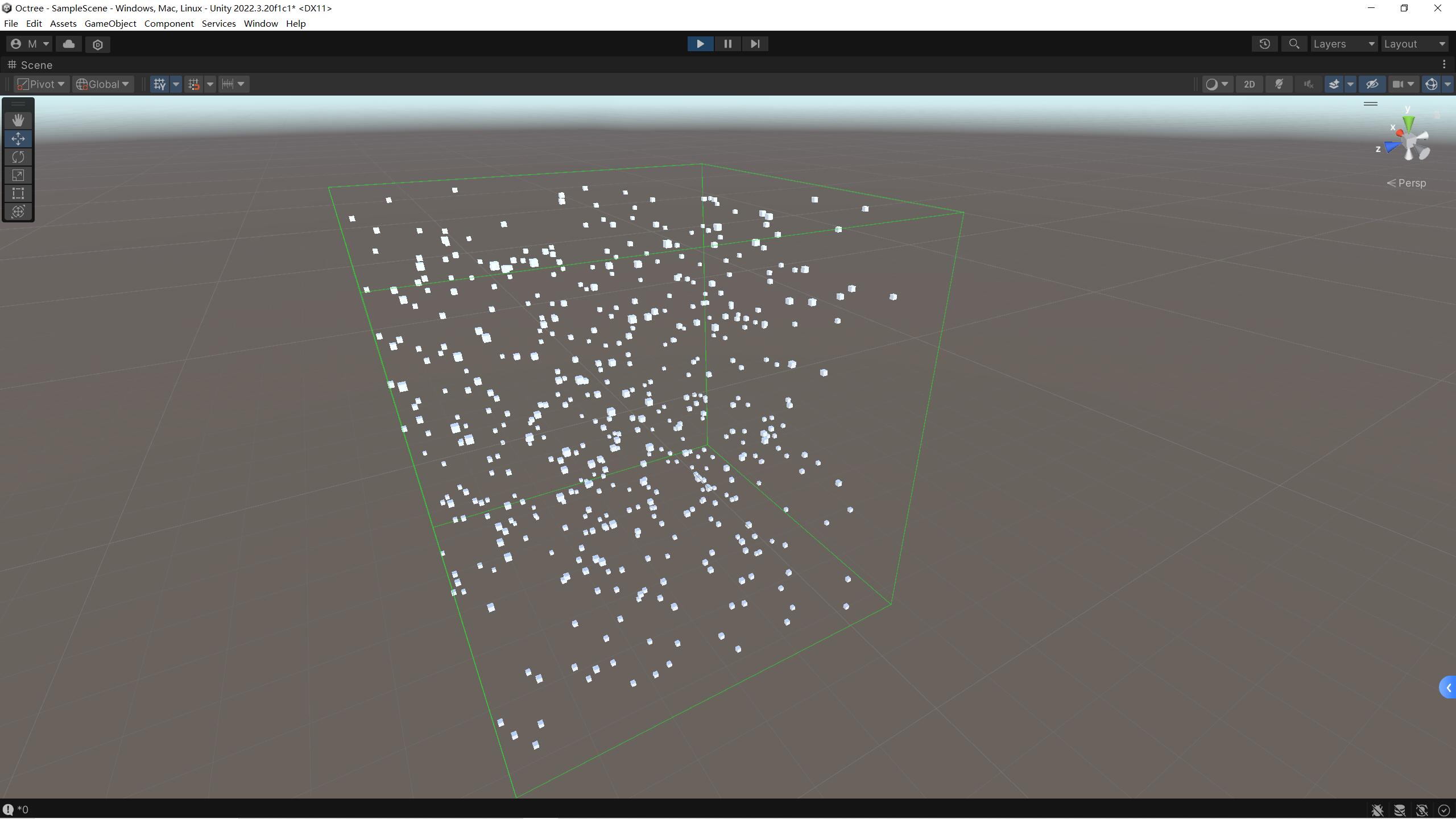
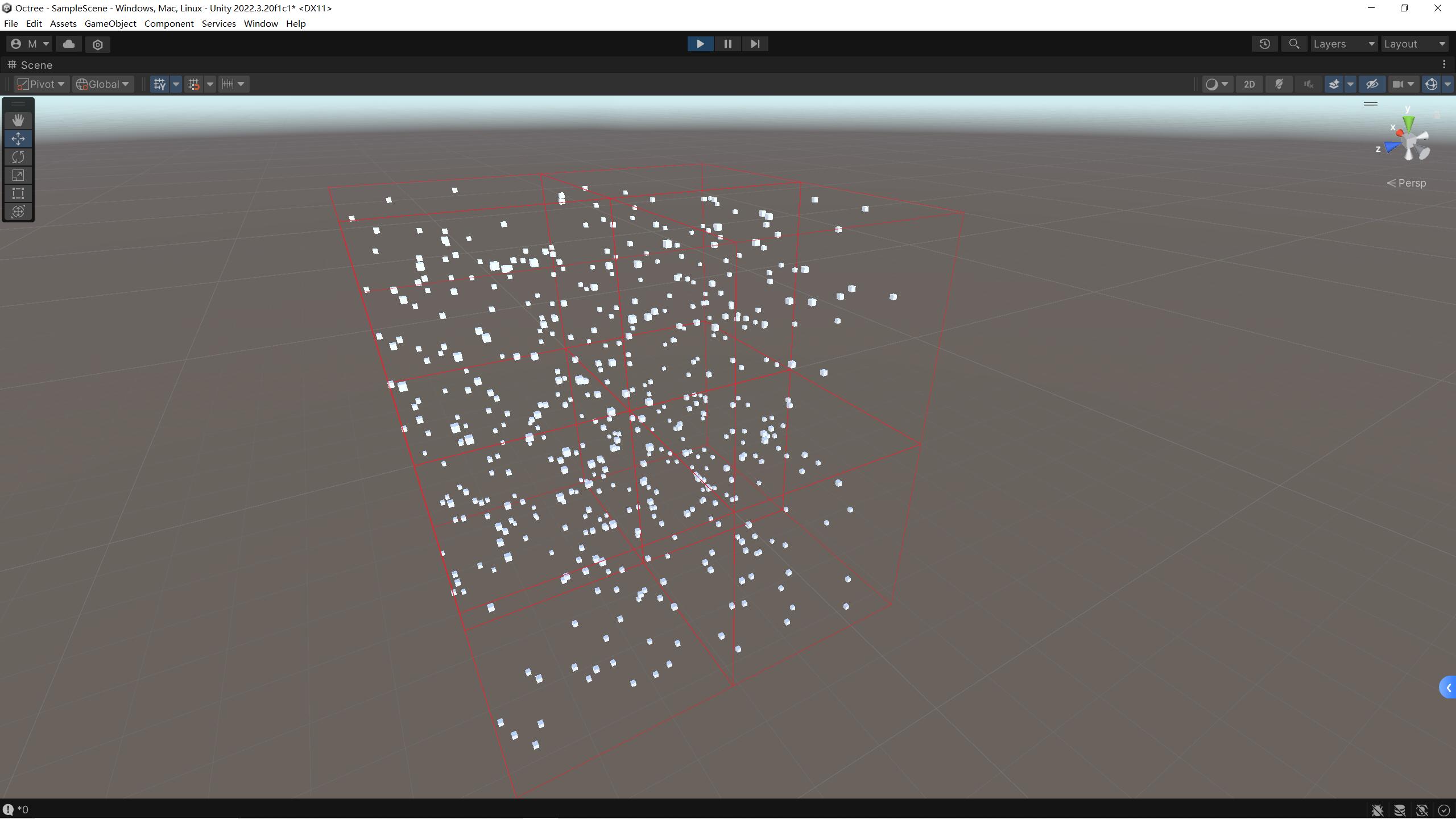
成果展示
代码
OctreeNode
cs
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class OctreeNode
{
//空间内包含的物体
public List<GameObject> areaObjects;
//空间中心
public Vector3 center;
//空间大小
public float size;
//子节点个数
private int kidCount = 8;
//子节点
public OctreeNode[] kids;
//构造函数
public OctreeNode (Vector3 center, float size)
{
this.center = center;
this.size = size;
kids = new OctreeNode[kidCount];
areaObjects = new List<GameObject>();
}
#region 八个子节点中心对应的偏移方向
public static Vector3[] centerOffset = new Vector3[8] {
new Vector3 (-1, 1, -1),
new Vector3 (1, 1, -1),
new Vector3 (-1, 1, 1),
new Vector3 (1, 1, 1),
new Vector3 (-1, -1, -1),
new Vector3 (1, -1, -1),
new Vector3 (-1, -1, 1),
new Vector3 (1, -1, 1)
};
#endregion
#region 空间和内部物体管理
//空间内物体树
public int objectCount => areaObjects.Count;
//把该空间画出来
public void DrawGizmos ()
{
Gizmos.DrawWireCube(center, Vector3.one * size);
}
//判断是否包含某个点
public bool Contains (Vector3 position)
{
float halfSize = size / 2.0f;
return Mathf.Abs(position.x - center.x) <= halfSize &&
Mathf.Abs(position.y - center.y) <= halfSize &&
Mathf.Abs(position.z - center.z) <= halfSize;
}
//清理空间内物体
public void Clear ()
{
areaObjects.Clear();
}
//添加物体
public void AddGameObject (GameObject obj)
{
areaObjects.Add(obj);
}
#endregion
}Orctree
cs
using System.Collections;
using System.Collections.Generic;
using System.ComponentModel.Design.Serialization;
using Unity.VisualScripting;
using UnityEngine;
//可视化模式
public enum OctreeDebugMode
{
AllDepth,
TargetDepth
}
public class Octree : MonoBehaviour
{
#region 物体生成和构建八叉树
//生成物体数
[Range(0, 500)]
public int genCount = 500;
//物体生成范围
[Range(1, 300)]
public float range = 100;
//生成的物体
public List<GameObject> sceneObjects;
//Octree最大层数
[Range(1, 8)]
public int maxDepth = 3;
//Octree的根节点
public OctreeNode root;
// Start is called before the first frame update
void Start()
{
GenObjects();
OctreePartition();
}
//随机生成一些cube
private void GenObjects()
{
float genRange = range * 0.5f;
sceneObjects = new List<GameObject>();
for (int i = 0; i < genCount; ++i)
{
GameObject obj = GameObject.CreatePrimitive(PrimitiveType.Cube);
obj.transform.position = new Vector3(Random.Range(-genRange, genRange),
Random.Range(-genRange, genRange),
Random.Range(-genRange, genRange));
obj.hideFlags = HideFlags.HideInHierarchy;
sceneObjects.Add(obj);
}
}
//进行八叉树划分
private void OctreePartition ()
{
//设定根节点
Vector3 origin = Vector3.one;
root = new OctreeNode(Vector3.zero, range);
root.areaObjects = sceneObjects;
//往下生成八叉树 根节点层数为1
GenerateOcetree(root, range, 2);
}
//递归往下生成八叉树
private void GenerateOcetree (OctreeNode root, float range, int depth)
{
//depth是当前生成的层数
if (depth > maxDepth) return;
//下一层的大小
float halfRange = range / 2.0f;
//根节点偏移量
float rootOffset = halfRange / 2.0f;
for (int i = 0; i < 8; ++i)
{
Vector3 origin = root.center + OctreeNode.centerOffset[i] * rootOffset;
root.kids[i] = new OctreeNode(origin, halfRange);
}
PartitionSceneObjects(root);
for (int i = 0; i < 8; ++i)
{
if (root.kids[i].objectCount >= 2) GenerateOcetree(root.kids[i], halfRange, depth + 1);
}
}
//把空间内物体划分给子节点
private void PartitionSceneObjects(OctreeNode root)
{
foreach (GameObject obj in root.areaObjects)
{
foreach (OctreeNode kid in root.kids)
{
if (kid.Contains(obj.transform.position))
{
kid.AddGameObject(obj);
}
}
}
}
#endregion
#region 可视化
//是否显示八叉树
public bool showOctree = true;
//可视化类型
public OctreeDebugMode octreeDebugMode;
//可视化层数
[Range(0, 8)]
public int displayDepth = 3;
//不同深度的可视化颜色
public Color[] displayColor;
private void OnDrawGizmos()
{
if (root == null) return;
if (showOctree && displayDepth <= maxDepth)
{
//显示所有深度的空间范围
if (octreeDebugMode == OctreeDebugMode.AllDepth)
{
DrawNode(root, 1);
}
//显示指定深度的空间范围(第displayDepth层)
else if (octreeDebugMode == OctreeDebugMode.TargetDepth)
{
if (displayDepth > 0 && displayColor.Length >= displayDepth)
{
Color color = displayColor[displayDepth - 1];
color.a = 0.5f;
Gizmos.color = color;
DrawTargetDepth(root, displayDepth);
}
}
}
}
//绘制所有节点 当前深度为depth
private void DrawNode(OctreeNode root, int depth)
{
if (root == null || depth > maxDepth) return;
Color color = displayColor[depth - 1];
color.a = 0.5f;
Gizmos.color = color;
root.DrawGizmos();
foreach (OctreeNode kid in root.kids)
{
DrawNode(kid, depth + 1);
}
}
//绘制指定层
private void DrawTargetDepth (OctreeNode root, int targetDepth)
{
--targetDepth;
if (root == null || targetDepth < 0) return;
Debug.Log(targetDepth);
if (targetDepth == 0)
{
root.DrawGizmos();
return;
}
foreach (OctreeNode kid in root.kids)
{
DrawTargetDepth(kid, targetDepth);
}
}
#endregion
}