经过以上的学习,相信可以对基本的机器人的规划和控制有了一个初级的认识了,接下来我们需要认识一下更多关于机器人模型的事情。
机器人模型和机器人状态
在本节中,我们将引导您了解在 MoveIt 中使用运动学的 C++ API。
RobotModel 和 RobotState 类
RobotModel 和 RobotState 类是核心类,可让您访问机器人的运动学。
RobotModel 类包含所有链接和关节之间的关系,包括从 URDF 加载的关节极限属性。RobotModel 还将机器人的链节和关节划分为 SRDF 中定义的规划组。有关 URDF 和 SRDF 的单独教程可在此处找到:URDF 和 SRDF 教程
RobotState 包含有关机器人在某个时间点的信息,存储关节位置的矢量以及可选的速度和加速度。此信息可用于获取有关机器人的运动学信息,该信息取决于其当前状态,例如末端执行器的雅可比。
RobotState 还包含辅助函数,用于根据末端执行器位置(笛卡尔姿势)设置手臂位置并计算笛卡尔轨迹。
在此示例中,我们将演练将这些类与 Panda 一起使用的过程。
运行测试
Ros 启动启动文件以直接从 moveit_tutorials 运行代码:
python
roslaunch moveit_tutorials robot_model_and_robot_state_tutorial.launch预期输出将采用以下形式。由于我们使用的是随机关节值,因此数字将不匹配:
输出情况为
python
ros.moveit_tutorials: Model frame: /panda_link0
ros.moveit_tutorials: Joint panda_joint1: 0.000000
ros.moveit_tutorials: Joint panda_joint2: 0.000000
ros.moveit_tutorials: Joint panda_joint3: 0.000000
ros.moveit_tutorials: Joint panda_joint4: 0.000000
ros.moveit_tutorials: Joint panda_joint5: 0.000000
ros.moveit_tutorials: Joint panda_joint6: 0.000000
ros.moveit_tutorials: Joint panda_joint7: 0.000000
ros.moveit_tutorials: Current state is not valid
ros.moveit_tutorials: Current state is valid
ros.moveit_tutorials: Translation:
-0.541498
-0.592805
0.400443
ros.moveit_tutorials: Rotation:
-0.395039 0.600666 -0.695086
0.299981 -0.630807 -0.715607
-0.868306 -0.491205 0.0690048
ros.moveit_tutorials: Joint panda_joint1: -2.407308
ros.moveit_tutorials: Joint panda_joint2: 1.555370
ros.moveit_tutorials: Joint panda_joint3: -2.102171
ros.moveit_tutorials: Joint panda_joint4: -0.011156
ros.moveit_tutorials: Joint panda_joint5: 1.100545
ros.moveit_tutorials: Joint panda_joint6: 3.230793
ros.moveit_tutorials: Joint panda_joint7: -2.651568
ros.moveit_tutorials: Jacobian:
0.592805 -0.0500638 -0.036041 0.366761 -0.0334361 0.128712 -4.33681e-18
-0.541498 -0.0451907 0.0417049 -0.231187 0.0403683 0.00288573 3.46945e-18
0 -0.799172 0.0772022 -0.247151 0.0818336 0.0511662 0
0 0.670056 -0.742222 0.349402 -0.748556 -0.344057 -0.695086
0 -0.74231 -0.669976 -0.367232 -0.662737 0.415389 -0.715607
1 4.89669e-12 0.0154256 0.862009 0.021077 0.842067 0.0690048这里的教程我没有怎么看懂,所以我们直接从源码出发来分析这个过程具体发生了什么吧。
cpp
#include <ros/ros.h>
// MoveIt
#include <moveit/robot_model_loader/robot_model_loader.h>
#include <moveit/robot_model/robot_model.h>
#include <moveit/robot_state/robot_state.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "robot_model_and_robot_state_tutorial");
ros::AsyncSpinner spinner(1);
spinner.start();
robot_model_loader::RobotModelLoader robot_model_loader("robot_description");
const moveit::core::RobotModelPtr& kinematic_model = robot_model_loader.getModel();
ROS_INFO("Model frame: %s", kinematic_model->getModelFrame().c_str());
// Using the :moveit_core:`RobotModel`, we can construct a
// :moveit_core:`RobotState` that maintains the configuration
// of the robot. We will set all joints in the state to their
// default values. We can then get a
// :moveit_core:`JointModelGroup`, which represents the robot
// model for a particular group, e.g. the "panda_arm" of the Panda
// robot.
moveit::core::RobotStatePtr kinematic_state(new moveit::core::RobotState(kinematic_model));
kinematic_state->setToDefaultValues();
const moveit::core::JointModelGroup* joint_model_group = kinematic_model->getJointModelGroup("panda_arm");
const std::vector<std::string>& joint_names = joint_model_group->getVariableNames();
// Get Joint Values
// ^^^^^^^^^^^^^^^^
// We can retrieve the current set of joint values stored in the state for the Panda arm.
std::vector<double> joint_values;
kinematic_state->copyJointGroupPositions(joint_model_group, joint_values);
for (std::size_t i = 0; i < joint_names.size(); ++i)
{
ROS_INFO("Joint %s: %f", joint_names[i].c_str(), joint_values[i]);
}
// Joint Limits
// ^^^^^^^^^^^^
// setJointGroupPositions() does not enforce joint limits by itself, but a call to enforceBounds() will do it.
/* Set one joint in the Panda arm outside its joint limit */
joint_values[0] = 5.57;
kinematic_state->setJointGroupPositions(joint_model_group, joint_values);
/* Check whether any joint is outside its joint limits */
ROS_INFO_STREAM("Current state is " << (kinematic_state->satisfiesBounds() ? "valid" : "not valid"));
/* Enforce the joint limits for this state and check again*/
kinematic_state->enforceBounds();
ROS_INFO_STREAM("Current state is " << (kinematic_state->satisfiesBounds() ? "valid" : "not valid"));
// Forward Kinematics
// ^^^^^^^^^^^^^^^^^^
// Now, we can compute forward kinematics for a set of random joint
// values. Note that we would like to find the pose of the
// "panda_link8" which is the most distal link in the
// "panda_arm" group of the robot.
kinematic_state->setToRandomPositions(joint_model_group);
const Eigen::Isometry3d& end_effector_state = kinematic_state->getGlobalLinkTransform("panda_link8");
/* Print end-effector pose. Remember that this is in the model frame */
ROS_INFO_STREAM("Translation: \n" << end_effector_state.translation() << "\n");
ROS_INFO_STREAM("Rotation: \n" << end_effector_state.rotation() << "\n");
// Inverse Kinematics
// ^^^^^^^^^^^^^^^^^^
// We can now solve inverse kinematics (IK) for the Panda robot.
// To solve IK, we will need the following:
//
// * The desired pose of the end-effector (by default, this is the last link in the "panda_arm" chain):
// end_effector_state that we computed in the step above.
// * The timeout: 0.1 s
double timeout = 0.1;
bool found_ik = kinematic_state->setFromIK(joint_model_group, end_effector_state, timeout);
// Now, we can print out the IK solution (if found):
if (found_ik)
{
kinematic_state->copyJointGroupPositions(joint_model_group, joint_values);
for (std::size_t i = 0; i < joint_names.size(); ++i)
{
ROS_INFO("Joint %s: %f", joint_names[i].c_str(), joint_values[i]);
}
}
else
{
ROS_INFO("Did not find IK solution");
}
// Get the Jacobian
// ^^^^^^^^^^^^^^^^
// We can also get the Jacobian from the :moveit_core:`RobotState`.
Eigen::Vector3d reference_point_position(0.0, 0.0, 0.0);
Eigen::MatrixXd jacobian;
kinematic_state->getJacobian(joint_model_group,
kinematic_state->getLinkModel(joint_model_group->getLinkModelNames().back()),
reference_point_position, jacobian);
ROS_INFO_STREAM("Jacobian: \n" << jacobian << "\n");
// END_TUTORIAL
ros::shutdown();
return 0;
}这里我已经有点感觉了,如何通过关节和连杆信息来进行运动学的计算,首先link连杆是刚性不见,joint关节式用来连接两个link的,允许相对运动,包括旋转运动和移动关节两种基础形式,模型坐标系一般是不动的那个底座。
2. Model Frame(模型坐标系)
机器人模型的 "根坐标系",固定在机器人的基座(通常是link0)上,所有其他连杆的位置和姿态都以这个坐标系为基准计算。
例子:panda_link0 的坐标系就是模型坐标系,机械臂所有运动都相对于这个坐标系计算。
3. Robot Model(机器人模型)
机器人的 "蓝图",包含所有静态信息:
每个关节的类型(旋转 / 移动)、限位(比如旋转关节的角度范围:-2.9 到 2.9 弧度)、名称(panda_joint1到panda_joint7)。
每个连杆的长度、质量、形状,以及连杆之间通过哪个关节连接(比如link1通过joint1连接link0)。
这些信息通常通过 URDF/Xacro 文件定义,ROS 通过robot_description参数加载。
4. Robot State(机器人状态)
机器人的 "当前姿势",记录所有关节的当前位置(比如每个旋转关节的角度)。
例如:7 关节机械臂的状态就是一个包含 7 个数值的列表 θ1, θ2, θ3, θ4, θ5, θ6, θ7,分别对应 7 个关节的当前角度。
有了状态,就能计算出每个连杆(包括末端执行器)的位置和姿态。
过程
初始化
首先加载了模型并初始化状态信息
python
// 加载机器人模型(从robot_description参数)
robot_model_loader::RobotModelLoader robot_model_loader("robot_description");
const moveit::core::RobotModelPtr& kinematic_model = robot_model_loader.getModel();
// 模型坐标系(比如panda_link0)
ROS_INFO("Model frame: %s", kinematic_model->getModelFrame().c_str());
// 创建机器人状态(基于模型,初始关节值为默认值,比如全0)
moveit::core::RobotStatePtr kinematic_state(new moveit::core::RobotState(kinematic_model));
kinematic_state->setToDefaultValues(); // 关节值设为默认(比如全0)
// 获取关节组(比如"panda_arm",包含7个关节)
const moveit::core::JointModelGroup* joint_model_group = kinematic_model->getJointModelGroup("panda_arm");关节限位信息
第二步给定了关键限位检查
python
// 获取当前关节值(7个关节的角度)
std::vector<double> joint_values; // 存储7个数值
kinematic_state->copyJointGroupPositions(joint_model_group, joint_values);
// 打印每个关节的名称和当前角度(默认值)
for (std::size_t i = 0; i < joint_names.size(); ++i) {
ROS_INFO("Joint %s: %f", joint_names[i].c_str(), joint_values[i]);
}
// 故意设置一个关节超出限位(比如joint1的限位是-2.9到2.9,设为5.57)
joint_values[0] = 5.57; // 第一个关节(joint1)角度
kinematic_state->setJointGroupPositions(joint_model_group, joint_values);
// 检查是否超出限位(此时返回not valid)
ROS_INFO_STREAM("Current state is " << (kinematic_state->satisfiesBounds() ? "valid" : "not valid"));
// 自动修正到限位内(比如5.57→2.9)
kinematic_state->enforceBounds();
// 再次检查(返回valid)
ROS_INFO_STREAM("Current state is " << (kinematic_state->satisfiesBounds() ? "valid" : "not valid"));每个关节的参数:这里主要关注 "限位"(关节能转动的最大 / 最小角度),模型中已定义,状态会根据限位校验和修正关节值。
FK
第三步,正向运动学,正向的意思就是从关节角度计算末端执行器的位置,也就是输入了当前7个关节的角度(θ1~θ7),计算末端执行器(比如panda_link8)在模型坐标系(link0)中的位置和姿态。
python
// 给7个关节随机设置一个合法角度(在限位内)
kinematic_state->setToRandomPositions(joint_model_group);
// 计算末端执行器(panda_link8)的位姿
const Eigen::Isometry3d& end_effector_state = kinematic_state->getGlobalLinkTransform("panda_link8");
// 打印结果:平移(x,y,z)和旋转(3x3矩阵)
ROS_INFO_STREAM("Translation: \n" << end_effector_state.translation() << "\n"); // 位置
ROS_INFO_STREAM("Rotation: \n" << end_effector_state.rotation() << "\n"); // 姿态正运动学应该怎么计算呢?
通过坐标变换链计算:
link0 到 link1:通过 joint1 的角度 θ1 计算 link1 相对于 link0 的位姿。
link1 到 link2:通过 joint2 的角度 θ2 计算 link2 相对于 link1 的位姿,再叠加到 link0 坐标系。
以此类推,直到计算出 link8 相对于 link0 的位姿(末端位姿)。
每一步的变换都用齐次变换矩阵(4x4)表示,最终通过矩阵乘法叠加得到末端位姿。
IK
第四步,逆向运动学------从末端执行器位姿来计算关节角
已知末端执行器(link8)的目标位姿(比如想让末端到达 (x=0.5, y=0, z=0.3) 且旋转姿态为某个值),求 7 个关节的角度(θ1~θ7)。
python
// 目标位姿:用FK得到的末端位姿作为目标(也可以手动设置)
double timeout = 0.1; // 求解超时时间(100毫秒)
// 尝试求解IK
bool found_ik = kinematic_state->setFromIK(joint_model_group, end_effector_state, timeout);
// 打印结果
if (found_ik) {
// 提取求解得到的7个关节角
kinematic_state->copyJointGroupPositions(joint_model_group, joint_values);
for (std::size_t i = 0; i < joint_names.size(); ++i) {
ROS_INFO("Joint %s: %f", joint_names[i].c_str(), joint_values[i]);
}
} else {
ROS_INFO("Did not find IK solution"); // 目标位姿太离谱,解不出来
}IK要比FK复杂,因为7个关节对应6个末端自由度,(x,y,z 平移 + 3 个旋转),是超静定问题(多解或者无解)。代码中一般用数值迭代法(牛顿法)
从一个初始关节角(比如当前角度)出发,计算其对应的末端位姿(用 FK)。
计算与目标位姿的误差(比如位置差、角度差)。
逐步调整关节角,减小误差,直到误差小于阈值或超时。
注意:
所有 7 个关节都会被调整,因为它们共同决定末端位姿。
若目标位姿超出机械臂工作空间(比如太近或太远),则无解。
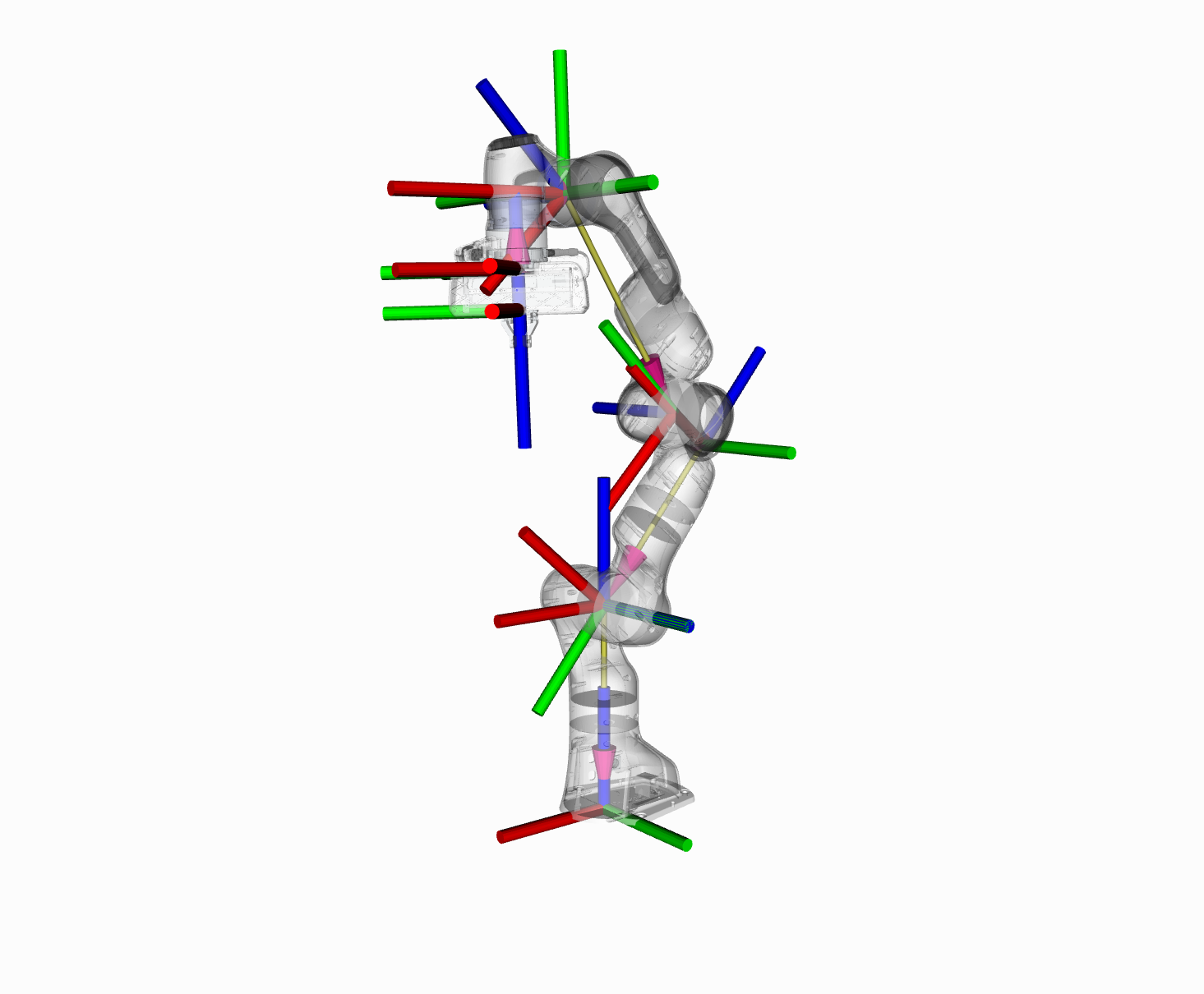
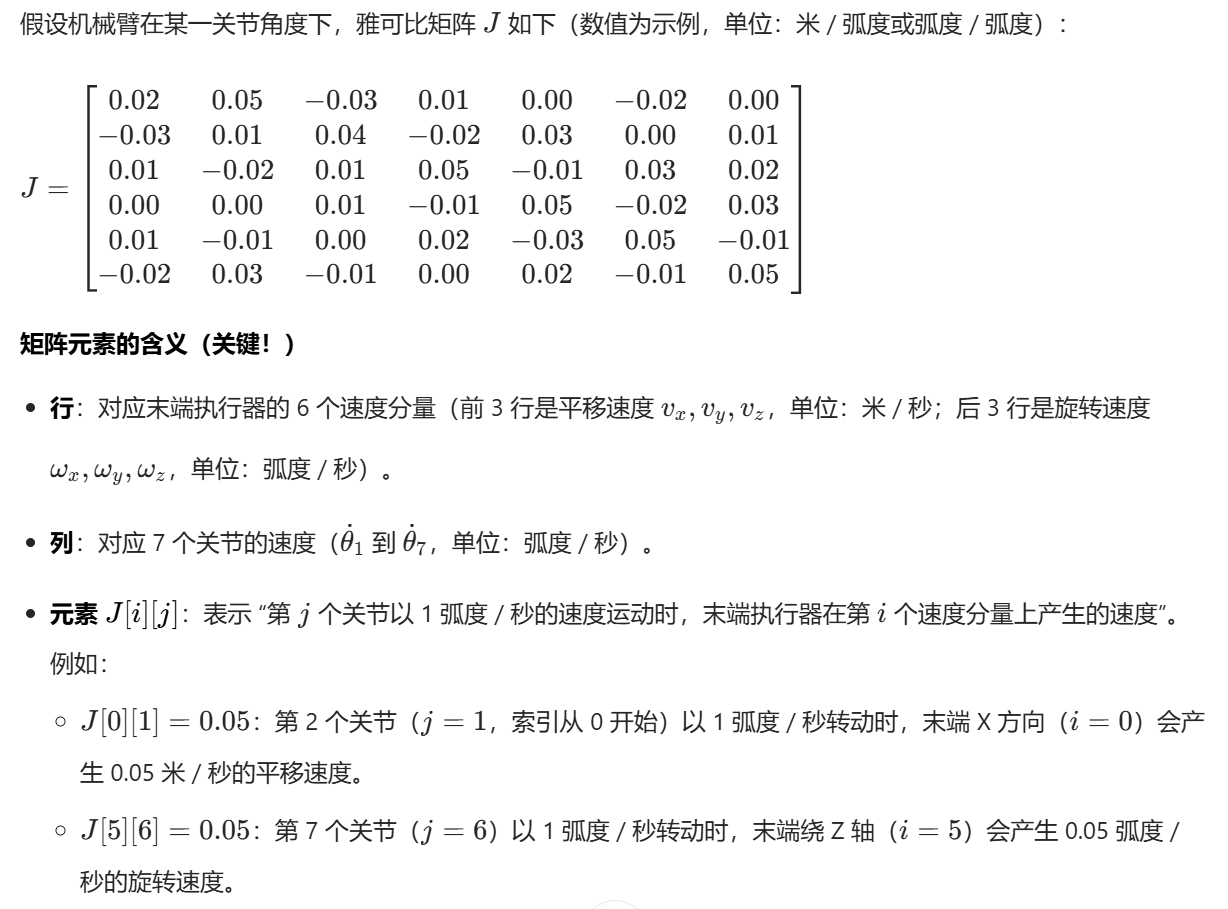
雅可比矩阵------关节速度与末端速度的关系
什么是雅可比矩阵?一个 6x7 的矩阵(6 行:末端 3 个平移速度 + 3 个旋转速度;7 列:7 个关节的角速度),描述 "关节速度如何影响末端速度":
末端速度 = 雅可比矩阵 × 关节速度
python
// 参考点:末端执行器坐标系原点(0,0,0)
Eigen::Vector3d reference_point_position(0.0, 0.0, 0.0);
Eigen::MatrixXd jacobian; // 存储雅可比矩阵(6x7)
// 计算雅可比矩阵
kinematic_state->getJacobian(joint_model_group,
kinematic_state->getLinkModel(joint_model_group->getLinkModelNames().back()),
reference_point_position, jacobian);
ROS_INFO_STREAM("Jacobian: \n" << jacobian << "\n");基于当前关节角(状态)和机器人结构(模型)计算:
每一列对应一个关节:若关节 i 转动 1 弧度 / 秒,末端会产生多大的平移和旋转速度,这列数值就是这个速度的分量。
用途:运动控制(比如让末端按特定速度移动,反推关节需要转多快)、 singularities(奇异点)检测(矩阵行列式为 0 时,末端某些方向动不了)。
这里我们举个例子来说明雅可比矩阵是怎么和模型相互作用的。
实际在moveit中,通过调用API来计算这个J矩阵即可。
总结关键问题
7 个关节都会被考虑吗?会!FK/IK/ 雅可比计算都基于关节组(7 个关节),所有关节的角度共同决定末端位姿。
末端执行器panda_link8是什么?机械臂最末端的连杆(法兰盘),用来安装夹爪等工具,是我们关注的 "操作端点",FK/IK 都是以它为目标。
模型、状态、关节、连杆的关系?
模型(蓝图)定义了关节和连杆的 "结构"(谁连谁,能转多大)。
状态(姿势)记录了关节的 "当前角度"。
有了结构和角度,就能算连杆(包括末端)的位姿(FK),或反过来算角度(IK)。
到此为止,moveit的基本教程就算是结束了,后续我们会自己做一些项目的开发时还会回顾这些基本知识。同时也附上另外一位博主的相关教程,https://blog.csdn.net/huangjunsheng123/category_10446765.html