一、基础介绍
什么是 mul 与 reduce_sum?
mul 通常指元素级乘法(Element-wise Multiplication),它将两个形状相同的张量中对应位置的元素相乘,返回一个与原张量形状相同的新张量。
reduce_sum 是一种规约操作(Reduction Operation),它沿指定维度对张量的元素求和,从而 "压缩" 或 "减少" 张量的维度。如果不指定维度,则对所有元素求和,返回一个标量。
二、baseline 结构
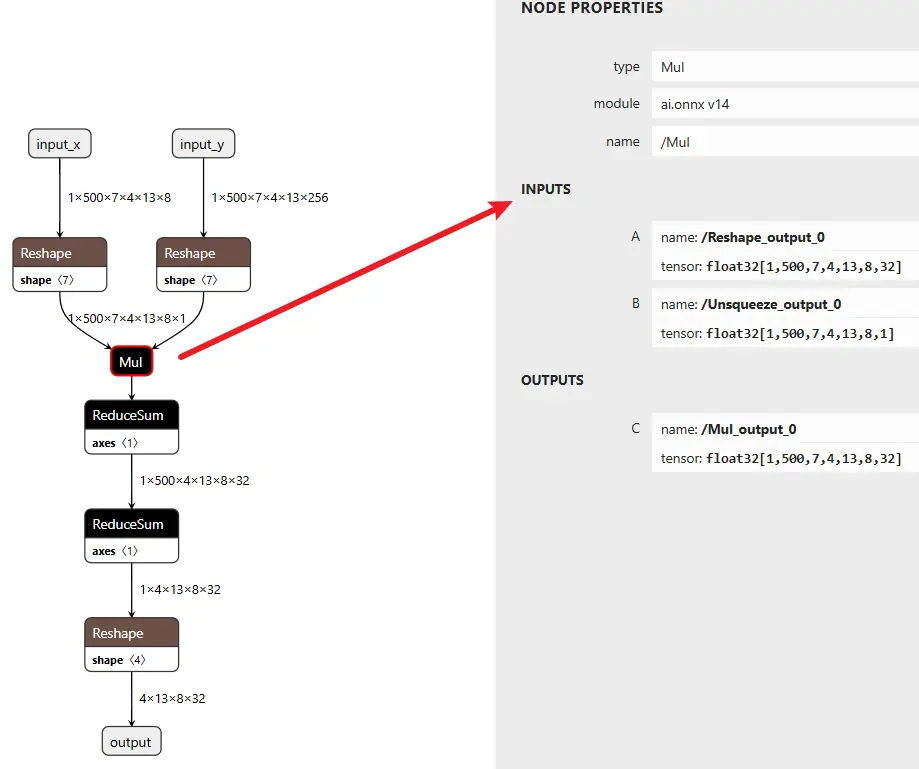
onnx 可视化图如下:
对应代码如下:
Plain
class CustomNet(nn.Module):
def __init__(self):
super(CustomNet, self).__init__()
def forward(self, a, b):
# a: shape (1, 500, 7, 4, 13, 8)
# b: shape (1, 500, 7, 4, 13, 256)
# Step 1: Unsqueeze a -> (1, 500, 7, 4, 13, 8, 1)
a = a.unsqueeze(-1)
# Step 2: Reshape b -> (1, 500, 7, 4, 13, 8, 32)
b = b.view(1, 500, 7, 4, 13, 8, 32)
# Step 3: Mul (broadcast over last dim)
out = a * b # shape: (1, 500, 7, 4, 13, 8, 32)
# # Step 4: ReduceSum over dim=2 (index 2 = 7 dim)
out = out.sum(dim=2) # shape: (1, 500, 4, 13, 8, 32)
# # Step 5: ReduceSum over dim=1 (500 dim)
out = out.sum(dim=1) # shape: (1, 4, 13, 8, 32)
# Step 6: Reshape to final output
out = out.view(-1, 13, 8, 32) # 可根据需要调整最终输出 shape
return out
a = torch.randn(1, 500, 7, 4, 13, 8)
b = torch.randn(1, 500, 7, 4, 13, 256)
model = CustomNet()
output = model(a, b)在征程 6M 上进行简单的模型编译与性能预估:
Plain
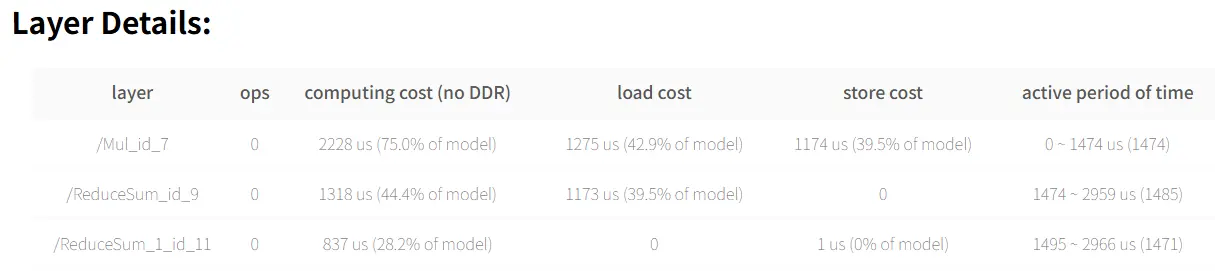
hb_compile -m mymodel.onnx --march nash-m --fast-perf根据产出物得到预估 latency:2.97 ms
这个结构如何进行优化呢?
三、合并 reduce_sum
Plain
# Step 4: ReduceSum over dim=2 (index 2 = 7 dim)
out = out.sum(dim=2) # shape: (1, 500, 4, 13, 8, 32)
# Step 5: ReduceSum over dim=1 (500 dim)
out = out.sum(dim=1) # shape: (1, 4, 13, 8, 32)这两个 reducesum 能合并成一个,使用 dim=(1, 2)(即同时对 dim=1 和 dim=2 做 sum),前提是这两个维度的求和没有先后顺序依赖(即两个维度是独立的)
Plain
out = out.sum(dim=(1, 2)) # 一次性对 dim=1 和 dim=2 求和PyTorch 中 。sum(dim=(1, 2)) 会按照给出的维度一次性执行 sum 操作,等价于逐个做 dim=2 然后 dim=1,因为 sum 是可交换的操作,最终结果形状完全相同。
优化后结构如下,可以看到确实少了一个 reducesum:
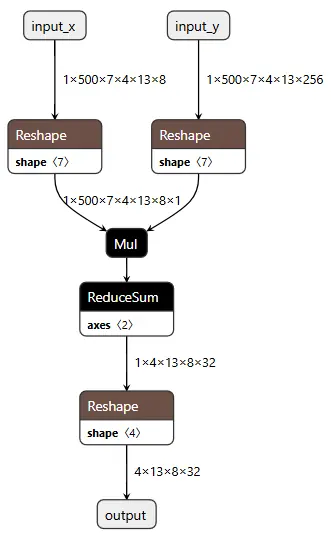
预估 latency: 1.75 ms

四、mul+reducesum 变成 conv
假设有两个张量:
- a.shape = (B, C, H, W)
- b.shape = (B, C, H, W)
常见操作是:
Plain
out = (a * b).sum(dim=[2, 3]) # 在 H 和 W 上求和,输出 shape: (B, C)
# ----------细节---------------
import torch
import torch.nn as nn
a = torch.randn(1, 3, 8, 4) # 多维时,a的最后一维若与b不同,则只能是1,否则不能进行广播
b = torch.randn(1, 3, 8, 4)
c = a * b # c的shape:torch.Size([1, 3, 8, 4])
d = c.sum(dim=[2,3]) # d的shape:torch.Size([1, 3])注意:torch 中 a * b 是逐元素相乘(mul),而不是矩阵乘法(matmul),形状不匹配时会触发广播(复制对应列 or 行)
通过 深度卷积(depthwise convolution) 可以近似实现 Mul + ReduceSum 操作,等价的 Conv2d 实现方式,可以用 groups=B*C 的 conv2d 来实现上述操作:
Plain
import torch
import torch.nn.functional as F
def conv_approx_mul_reducesum(a, b):
B, C, H, W = a.shape
# 把 b 变成卷积核,作为每个通道的 filter
kernel = b.reshape(B * C, 1, H, W)
# 输入 reshape 成 (1, B*C, H, W)
input_ = a.reshape(1, B * C, H, W)
# 深度卷积实现 mul+sum,输出 shape: (1, B*C, 1, 1)
output = F.conv2d(input_, kernel, groups=B * C)
# reshape 回 (B, C)
return output.reshape(B, C)conv2d 的过程是:
- 对每个通道进行 乘法(卷积)
- 然后在 kernel 区域内 求和
所以 F.conv2d(a, b, groups=B*C) 本质就是:对 a 和 b 逐元素相乘再求和 = Mul + ReduceSum
一致性验证:
Plain
import torch
import torch.nn as nn
import torch.nn.functional as F
a = torch.randn(1, 3, 8, 4) # 多维时,a的最后一维若与b不同,则只能是1,否则不能进行广播
b = torch.randn(1, 3, 8, 4)
c = a * b # c的shape:torch.Size([1, 3, 8, 4])
d = c.sum(dim=[2,3]) # d的shape:torch.Size([1, 3])
print(d)
def F_conv2d_approx_mul_reducesum(a, b):
B, C, H, W = a.shape
# 把 b 变成卷积核,作为每个通道的 filter
kernel = b.reshape(B * C, 1, H, W)
# 输入 reshape 成 (1, B*C, H, W)
input_ = a.reshape(1, B * C, H, W)
# 深度卷积实现 mul+sum,输出 shape: (1, B*C, 1, 1)
output = F.conv2d(input_, kernel, groups=B * C)
# reshape 回 (B, C)
return output.reshape(B, C)
print(F_conv2d_approx_mul_reducesum(a,b))
def nn_conv2d_approx_mul_reducesum(a, b):
B, C, H, W = a.shape
# 把 b 变成卷积核,作为每个通道的 filter
kernel = b.reshape(B * C, 1, H, W)
# 输入 reshape 成 (1, B*C, H, W)
input_ = a.reshape(1, B * C, H, W)
# 假设已有输入input_和卷积核kernel
# kernel形状: (输出通道数, 输入通道数//groups, 核高, 核宽)
# 例如:groups=B*C时,输入通道数需为groups的倍数
out_channels = kernel.size(0)
in_channels = kernel.size(1) * (B * C) # 输入通道数 = 每组通道数 * groups
kernel_size = (kernel.size(2), kernel.size(3))
# 创建nn.Conv2d模块
conv_layer = nn.Conv2d(
in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
groups=B * C,
bias=False # 若F.conv2d未用偏置
)
# 将预定义的kernel赋值给conv_layer的权重
conv_layer.weight.data = kernel # 注意:需确保kernel形状与nn.Conv2d的weight格式一致
# 深度卷积实现 mul+sum,输出 shape: (1, B*C, 1, 1)
output = conv_layer(input_)
# reshape 回 (B, C)
return output.reshape(B, C)
print(nn_conv2d_approx_mul_reducesum(a,b))输出:
Plain
tensor([[-0.3991, 0.2382, -8.5925]])
tensor([[-0.3991, 0.2382, -8.5925]])
tensor([[-0.3991, 0.2382, -8.5925]], grad_fn=<ViewBackward0>)可以看到,结果确实一样。
真正部署时,不太建议这么做,因为小尺寸没必要(快不了多少),大尺寸硬件不支持。