一 、 实验目的
-
掌握分治法思想;
-
学会最近点对问题求解方法。
二 、实验内容
-
对于平面上给定的N个点,给出所有点对的最短距离,即,输入是平面上的N个点,输出是N点中具有最短距离的两点。
-
要求随机生成N个点的平面坐标,应用蛮力法编程计算出所有点对的最短距离。
-
要求随机生成N个点的平面坐标,应用分治法编程计算出所有点对的最短距离。
-
分别对N=100000~1000000,统计算法运行时间,比较理论效率与实测效率的差异,同时对蛮力法和分治法的算法效率进行分析和比较。
-
如果能将算法执行过程利用图形界面输出,可获加分。
三 、 算法思想
-
预处理:根据输入点集S中的x轴和y轴坐标进行排序,得到X和Y,很显然此时X和Y中的点就是S中的点。
-
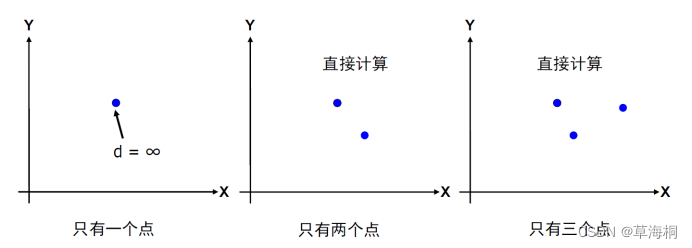
点数较少时的情形
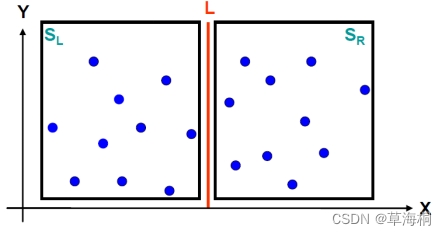
- 点数|S|>3时,将平面点集S分割成为大小大致相等的两个子集SL和SR,选取一个垂直线L作为分割直线,如何以最快的方法尽可能均匀平分?注意这个操作如果达到效率O(n^2),将导致整个算法效率达O(n^2)。
-
两个递归调用,分别求出SL和SR中的最短距离为dl和dr。
-
取d=min(dl, dr),在直线L两边分别扩展d,得到边界区域Y,Y'是区域Y中的点按照y坐标值排序后得到的点集(为什么要排序?),Y'又可分为左右两个集合Y'L和Y'R
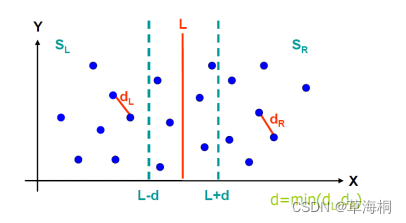
- 对于Y'L中的每一点,检查Y'R中的点与它的距离,更新所获得的最近距离,注意这个步骤的算法效率,请务必做到线性效率,并在实验报告中详细解释为什么能做到线性效率?

四 、实验步骤
先定义全局变量和点结构:
#define max 10000000000;//假定最大距离
int n,m,**v;
//n为规模,m为创建点集合过程时的点数,v用于判断是否已有该点(rand不产生大于40000的数)
double time1,time2;//蛮力法、分治法花费的时间
double dt1,dt2;//蛮力法、分治法求得的最近距离
//---------------------------
struct D{//点结构
int x=0,y=0;
};
D a1,b1,a2,b2;//a1、b1为蛮力法求得的点的下标,a2、b2为分治法求得的点的下标
D *k,*p;//蛮力法、分治法用的点集合1、蛮力法
对前面n-1个点的每一个点,均与在其后面的每个点进行距离计算,并与最小距离min比较,若比min小,则更新min的值,时间复杂度为O(n2)。
伪代码:
Manli(A)
min=Infinity//最小距离
for i=0 to A.length-1
for j=i+1 to A.length
d=dis(A[i],A[j])//A[i]、A[j]两点的距离
if d<min
min=d
a=i
b=j
a1=a
b1=b
return min2、分治法
2.1 先用快速排序SortX(A,1,n)将所有点按x坐标升序排序
方便分治均匀,时间复杂度为O(nlgn)。
SortX(l,r)
i=l,j=r,keyx=A[l].x,keyy=A[l].y //Array A is a global variable
while i<j
while i<j and A[j].x>=keyx
j--
if i<j
A[i]=A[j]
i++
else
break
while i<j and A[i].x<=keyx
i++
if i<j
A[j]=A[i]
j--
A[i].x=keyx,A[i].y=keyy
if(l<i-1)
SortX(l,i-1)
if(i+1<r)
SortX(i+1,r)2.2 点数 n<=3时直接计算,时间复杂度为O(1)
2.3 点数 n >3 时
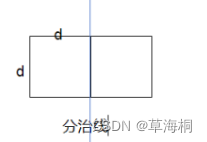
将平面点集S分割成为大小大致相等的两个子集SL和SR,选取一个垂直线L(以x坐标居中的为分治点,上面已排序好了)作为分割直线。
两个子集递归调用(当只有一个元素时返回无穷大,两个时按y升序排序这两个元素),分别求出SL和SR中的最短距离dl和dr。
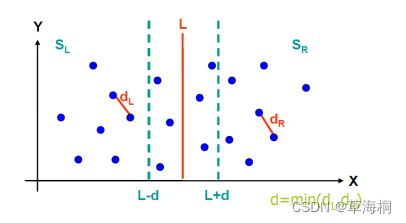
取最小值d=min(dl, dr),在直线L两边分别扩展d,得到边界区域Y。
然后用Marge(l,mid,r)函数按纵坐标升序归并左右两部分点集合,时间复杂度O(n)
由于前面点已按y升序排序,所以在区域Y中,两点距离小于当前min的可能情况为在一个长2*d,、宽d的长方形内。
由于已知两边的最小距离为d,则对在这个长方形内任意一点P,距P为d的点Q的个数不超过6个,例如下面的点P最多在左右两个正方形的6条边上各有一个点距P为d(但是此情况下,在同一个正方形内的其他两个点的距离已经小于当前最小距离小于d了,所以可能的点数不超过6);
再或者是说,在这个长方形内,最多就六个点相距d,即六个顶点。
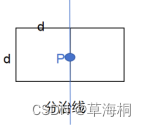
所以,只需要对t点集中的每个点与其后面的5个点比较距离是否小于当前最小距离d并更新d就行。时间复杂度O(n)。
综上所述,T(n)=2*T(n/2)+f(n) 。f(n)为Marge和遍历t点集,时间复杂度均为O(n),共递归lgn次,则时间复杂度为O(nlgn)。前面按x坐标排序的时间复杂度为O(nlgn),所以总的时间复杂度为O(nlgn)。
伪代码如下:
Fenzhi(l,r)
if l==r //一个点
return max //直接返回无穷大
if l+1==r //两个点,按y升序排序
a2=A[l]
b2=A[r]
A[l]=a2.y<b2.y?a2:b2 //y坐标较小的点
A[r]=a2.y>b2.y?a2:b2 //y坐标较大的点
return dis(A[l],A[r])
if l+1<r //点数大于2
mid=(r+l)/2 mid为分治中点,将点集合划分为左右均匀的两部分
d=min(Fenzhi(l,mid),Fenzhi(mid+1,r))//d取左右两部分最小距离的较小值
Merge(l,mid,r) //按纵坐标升序归并左右两部分的点
*t=new Point[r-l+1]
//记录跨中线且距离分治中点d水平距离小于当前最小值d的异侧点
tn=0 //t点集的元素个数
for i=1 to r
if A[i].x>(A[i].x-d) and A[i].x<(A[i].x+d)//异侧且距分治中心mid小于d则入t
t[tn++]=A[i]
for i=0 to tn-1
for j=i+1 to tn-1 and j<i+6 //往后判断5个点
//t[]中y升序,若y坐标差已超过当前d,break,判断下一个点
if t[j].y-t[i].y>d
break
if dis(t[i],t[j])<d //如果当前点距离小于等于当前d,则对最小距离d进行更新
d=dis(t[i],t[j])
a2=t[i]
b2=t[j]
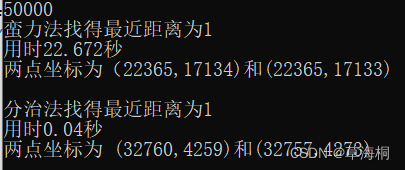
return d //返回当前分治的最小距离运行结果如下(取其中两例):两种方法求得的最近距离一致(虽然不一定是同一对点),且分治法更快。可见算法查找正确。
五、实验结果和分析
分别对N=100000~1000000,统计算法运行时间,比较理论效率与实测效率的差异,同时对蛮力法和分治法的算法效率进行分析和比较。
这里修改了代码,对每个规模N均运行5趟取平均时间。
|-----|--------|--------|--------|--------|---------|---------|---------|---------|
| 算法 | 规模N: | 5000 | 10000 | 20000 | 30000 | 50000 | 70000 | 100000 |
| 蛮力法 | 实测效率/s | 0.334 | 1.2372 | 4.7186 | 10.0754 | 30.1722 | 59.1302 | 120.953 |
| 蛮力法 | 理论效率/s | 0.3076 | 1.2304 | 4.9216 | 11.0736 | 30.76 | 60.2896 | 123.04 |
| 表1 |||||||||
| 算法 | 规模N: | 50000 | 100000 | 200000 | 300000 | 500000 | 700000 | 1000000 |
| 分治法 | 实测效率/s | 0.058 | 0.156 | 0.266 | 0.3618 | 0.726 | 1.012 | 1.44 |
| 分治法 | 理论效率/s | 0.0601 | 0.1278 | 0.271 | 0.42 | 0.7283 | 1.0458 | 1.5336 |
对于蛮力法,
T实测=k·n2实测
T理论=k·n2理论
所以可得
T理论=T实测·(n理论/n实测)2
根据上式,以N=10000为基准,求出蛮力法的理论效率。
对于分治法
T实测=k·n实测lgn实测
T理论=k·n理论lgn理论
所以可得
T理论=T实测·(n理论·lgn理论)/(n实测·lgn实测)
根据上式,以N=100000为基准,求出分治法的理论效率。
作出蛮力法的实测效率和理论效率曲线图如下:
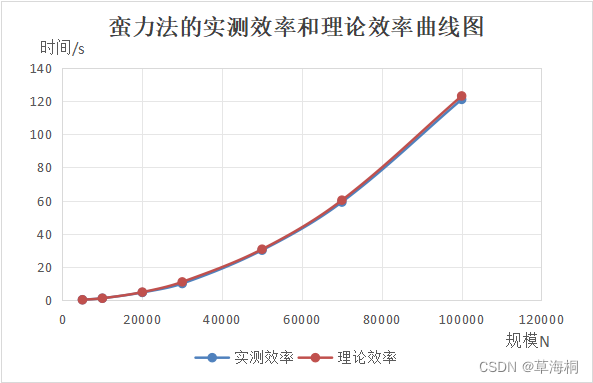
可以看出,实测效率和理论效率曲线贴合度很高,也都符合n2二次曲线。n=100000时的时间消耗,基本约为n=10000时的100倍。
作出分治法的实测效率和理论效率的曲线图如下:
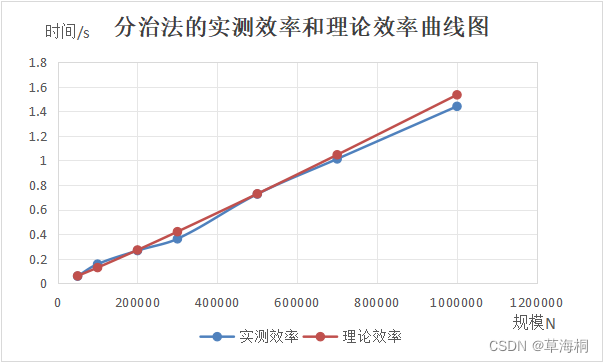
可以看出,分治法的实测曲线和理论曲线贴合度还行,但没有蛮力法的两条贴合度高,可能是由于实验次数不够大(只进行5次取平均)。符合nlgn型曲线走势。
对比两种方法,分治法效率明显由于蛮力法,尤其是当规模N持续增大时。