python
import cv2 as cv
img=cv.imread('bookpage.jpg')
img=cv.cvtColor(img,cv.COLOR_RGBA2GRAY)
_,result=cv.threshold(img,50,255,cv.THRESH_BINARY)
adaptive = cv.adaptiveThreshold(img,255,cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY,21,4)
cv.imshow('img',img)
cv.imshow('result',result)
cv.imshow('adaptive',adaptive)
cv.waitKey(0)
cv.destroyAllWindows()短短几行代码,却能让图像发生变化amazing😁

python
#HandTrackingMin.py
from unittest import result
import cv2
import mediapipe as mp
import time
cap = cv2.VideoCapture(0) # 摄像头数字
# 索引0指的是系统的默认摄像头
# 索引1指的是连接的第二个摄像头获取数据
mpHands = mp.solutions.hands
hands = mpHands.Hands() # 只用RGB,所以需要转换为RGB
mapDraw = mp.solutions.drawing_utils
pTime = 0
cTime = 0
while True:
success, img = cap.read()
imageRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
results = hands.process(imageRGB)
# print(results.multi_hand_landmarks) 手的检查
if results.multi_hand_landmarks:
for handLms in results.multi_hand_landmarks:
for id, lm in enumerate(handLms.landmark):
# print(id, lm)
h,w,c = img.shape
cx,cy = int(lm.x*w),int(lm.y*h)
print(id,cx,cy)
if id==4:
cv2.circle(img,(cx,cy),15,(0,0,255),cv2.FILLED) # 检查landmark==0,4
mapDraw.draw_landmarks(img, handLms, mpHands.HAND_CONNECTIONS) #获取手部骨架的连接线
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img,str(int(fps)),(10,70),cv2.FONT_HERSHEY_PLAIN,3,(0,0,255),3)
cv2.imshow('Image', img)
cv2.waitKey(1) #运行摄像头
python
#HangTrackingModule.py
import cv2
import mediapipe as mp
import time
class handDetector():
def __init__(self, mode=False, maxHands=4, detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands # 使用mediapipe库的手部姿势估计模型
self.hands = self.mpHands.Hands(self.mode, max_num_hands=self.maxHands, min_detection_confidence=self.detectionCon, min_tracking_confidence=self.trackCon)
self.mapDraw = mp.solutions.drawing_utils
def findHands(self, img, draw=True):
imageRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imageRGB)
if self.results.multi_hand_landmarks: # 检查是否检测到手部
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mapDraw.draw_landmarks(img, handLms, self.mpHands.HAND_CONNECTIONS) # 绘制手部关键点和连接线
return img
def findPositions(self, img, handNo=0, draw=True):
lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h) # 计算坐标
lmList.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 255, 255), cv2.FILLED) # Highlight the landmark
return lmList
def main():
pTime = 0
cap = cv2.VideoCapture(0)
detector = handDetector()
while True:
success, img = cap.read() # 读取摄像头的图像帧
img = detector.findHands(img)
lmList = detector.findPositions(img)
if len(lmList) != 0:
print(lmList[4]) # 打印关键点
cTime = time.time() # 获取当前时间
fps = 1 / (cTime - pTime) # 计算帧率
pTime = cTime # 更新上一帧的时间
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 0), 3)
cv2.imshow('Image', img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()车🚗(GitHub上看到的,蛮有意思的
python
# Code Changed, Optimized And Commented By: NeuralNine (Florian Dedov)
import math
import random
import sys
import os
import neat
import pygame
# Constants
# WIDTH = 1600
# HEIGHT = 880
WIDTH = 1920
HEIGHT = 1000
CAR_SIZE_X = 60
CAR_SIZE_Y = 60
BORDER_COLOR = (255, 255, 255, 255) # Color To Crash on Hit
current_generation = 0 # Generation counter
class Car:
def __init__(self):
# Load Car Sprite and Rotate
self.sprite = pygame.image.load('car.png').convert() # Convert Speeds Up A Lot
self.sprite = pygame.transform.scale(self.sprite, (CAR_SIZE_X, CAR_SIZE_Y))
self.rotated_sprite = self.sprite
# self.position = [690, 740] # Starting Position
self.position = [830, 920] # Starting Position
self.angle = 0
self.speed = 0
self.speed_set = False # Flag For Default Speed Later on
self.center = [self.position[0] + CAR_SIZE_X / 2, self.position[1] + CAR_SIZE_Y / 2] # Calculate Center
self.radars = [] # List For Sensors / Radars
self.drawing_radars = [] # Radars To Be Drawn
self.alive = True # Boolean To Check If Car is Crashed
self.distance = 0 # Distance Driven
self.time = 0 # Time Passed
def draw(self, screen):
screen.blit(self.rotated_sprite, self.position) # Draw Sprite
self.draw_radar(screen) # OPTIONAL FOR SENSORS
def draw_radar(self, screen):
# Optionally Draw All Sensors / Radars
for radar in self.radars:
position = radar[0]
pygame.draw.line(screen, (0, 255, 0), self.center, position, 1)
pygame.draw.circle(screen, (0, 255, 0), position, 5)
def check_collision(self, game_map):
self.alive = True
for point in self.corners:
# If Any Corner Touches Border Color -> Crash
# Assumes Rectangle
if game_map.get_at((int(point[0]), int(point[1]))) == BORDER_COLOR:
self.alive = False
break
def check_radar(self, degree, game_map):
length = 0
x = int(self.center[0] + math.cos(math.radians(360 - (self.angle + degree))) * length)
y = int(self.center[1] + math.sin(math.radians(360 - (self.angle + degree))) * length)
# While We Don't Hit BORDER_COLOR AND length < 300 (just a max) -> go further and further
while not game_map.get_at((x, y)) == BORDER_COLOR and length < 300:
length = length + 1
x = int(self.center[0] + math.cos(math.radians(360 - (self.angle + degree))) * length)
y = int(self.center[1] + math.sin(math.radians(360 - (self.angle + degree))) * length)
# Calculate Distance To Border And Append To Radars List
dist = int(math.sqrt(math.pow(x - self.center[0], 2) + math.pow(y - self.center[1], 2)))
self.radars.append([(x, y), dist])
def update(self, game_map):
# Set The Speed To 20 For The First Time
# Only When Having 4 Output Nodes With Speed Up and Down
if not self.speed_set:
self.speed = 20
self.speed_set = True
# Get Rotated Sprite And Move Into The Right X-Direction
# Don't Let The Car Go Closer Than 20px To The Edge
self.rotated_sprite = self.rotate_center(self.sprite, self.angle)
self.position[0] += math.cos(math.radians(360 - self.angle)) * self.speed
self.position[0] = max(self.position[0], 20)
self.position[0] = min(self.position[0], WIDTH - 120)
# Increase Distance and Time
self.distance += self.speed
self.time += 1
# Same For Y-Position
self.position[1] += math.sin(math.radians(360 - self.angle)) * self.speed
self.position[1] = max(self.position[1], 20)
self.position[1] = min(self.position[1], WIDTH - 120)
# Calculate New Center
self.center = [int(self.position[0]) + CAR_SIZE_X / 2, int(self.position[1]) + CAR_SIZE_Y / 2]
# Calculate Four Corners
# Length Is Half The Side
length = 0.5 * CAR_SIZE_X
left_top = [self.center[0] + math.cos(math.radians(360 - (self.angle + 30))) * length,
self.center[1] + math.sin(math.radians(360 - (self.angle + 30))) * length]
right_top = [self.center[0] + math.cos(math.radians(360 - (self.angle + 150))) * length,
self.center[1] + math.sin(math.radians(360 - (self.angle + 150))) * length]
left_bottom = [self.center[0] + math.cos(math.radians(360 - (self.angle + 210))) * length,
self.center[1] + math.sin(math.radians(360 - (self.angle + 210))) * length]
right_bottom = [self.center[0] + math.cos(math.radians(360 - (self.angle + 330))) * length,
self.center[1] + math.sin(math.radians(360 - (self.angle + 330))) * length]
self.corners = [left_top, right_top, left_bottom, right_bottom]
# Check Collisions And Clear Radars
self.check_collision(game_map)
self.radars.clear()
# From -90 To 120 With Step-Size 45 Check Radar
for d in range(-90, 120, 45):
self.check_radar(d, game_map)
def get_data(self):
# Get Distances To Border
radars = self.radars
return_values = [0, 0, 0, 0, 0]
for i, radar in enumerate(radars):
return_values[i] = int(radar[1] / 30)
return return_values
def is_alive(self):
# Basic Alive Function
return self.alive
def get_reward(self):
# Calculate Reward (Maybe Change?)
# return self.distance / 50.0
return self.distance / (CAR_SIZE_X / 2)
def rotate_center(self, image, angle):
# Rotate The Rectangle
rectangle = image.get_rect()
rotated_image = pygame.transform.rotate(image, angle)
rotated_rectangle = rectangle.copy()
rotated_rectangle.center = rotated_image.get_rect().center
rotated_image = rotated_image.subsurface(rotated_rectangle).copy()
return rotated_image
def run_simulation(genomes, config):
# Empty Collections For Nets and Cars
nets = []
cars = []
# Initialize PyGame And The Display
pygame.init()
screen = pygame.display.set_mode((WIDTH, HEIGHT), pygame.FULLSCREEN)
# For All Genomes Passed Create A New Neural Network
for i, g in genomes:
net = neat.nn.FeedForwardNetwork.create(g, config)
nets.append(net)
g.fitness = 0
cars.append(Car())
# Clock Settings
# Font Settings & Loading Map
clock = pygame.time.Clock()
generation_font = pygame.font.SysFont("Arial", 30)
alive_font = pygame.font.SysFont("Arial", 20)
game_map = pygame.image.load('map.png').convert() # Convert Speeds Up A Lot
global current_generation
current_generation += 1
# Simple Counter To Roughly Limit Time (Not Good Practice)
counter = 0
while True:
# Exit On Quit Event
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit(0)
# For Each Car Get The Acton It Takes
for i, car in enumerate(cars):
output = nets[i].activate(car.get_data())
choice = output.index(max(output))
if choice == 0:
car.angle += 10 # Left
elif choice == 1:
car.angle -= 10 # Right
elif choice == 2:
if (car.speed - 2 >= 12):
car.speed -= 2 # Slow Down
else:
car.speed += 2 # Speed Up
# Check If Car Is Still Alive
# Increase Fitness If Yes And Break Loop If Not
still_alive = 0
for i, car in enumerate(cars):
if car.is_alive():
still_alive += 1
car.update(game_map)
genomes[i][1].fitness += car.get_reward()
if still_alive == 0:
break
counter += 1
if counter == 30 * 40: # Stop After About 20 Seconds
break
# Draw Map And All Cars That Are Alive
screen.blit(game_map, (0, 0))
for car in cars:
if car.is_alive():
car.draw(screen)
# Display Info
text = generation_font.render("Generation: " + str(current_generation), True, (0, 0, 0))
text_rect = text.get_rect()
text_rect.center = (900, 450)
screen.blit(text, text_rect)
text = alive_font.render("Still Alive: " + str(still_alive), True, (0, 0, 0))
text_rect = text.get_rect()
text_rect.center = (900, 490)
screen.blit(text, text_rect)
pygame.display.flip()
clock.tick(60) # 60 FPS
if __name__ == "__main__":
# Load Config
config_path = "./config.txt"
config = neat.config.Config(neat.DefaultGenome,
neat.DefaultReproduction,
neat.DefaultSpeciesSet,
neat.DefaultStagnation,
config_path)
# Create Population And Add Reporters
population = neat.Population(config)
population.add_reporter(neat.StdOutReporter(True))
stats = neat.StatisticsReporter()
population.add_reporter(stats)
# Run Simulation For A Maximum of 1000 Generations
population.run(run_simulation, 1000)
不过我的电脑显示到后面就有点恐怖了😨感觉像一堆爬行动物在跑
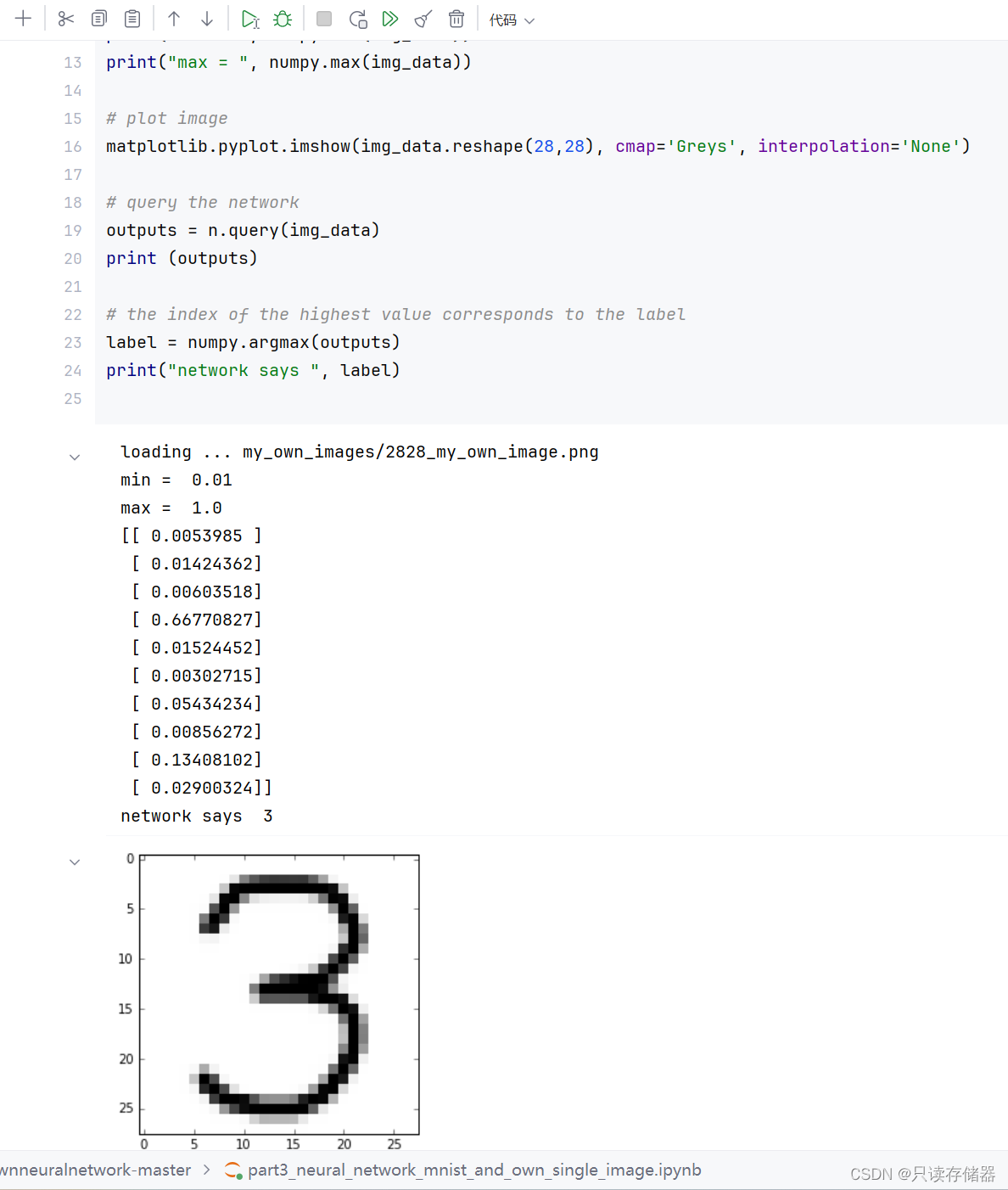
数字识别
python
import os
import cv2
import numpy as np
import matplotlib.pyplot as plt
import tensorflow as tf
# 加载模型
try:
model = tf.keras.models.load_model('handwritten.model.keras')
print("Model loaded successfully.")
except Exception as e:
print(f"Failed to load model: {e}")
exit()
# 图像文件夹路径更新为正确的路径
image_folder = 'E:/pythonProfessional/chat-bot'
image_number = 1
while True:
image_path = f"{image_folder}/digit{image_number}.png"
if not os.path.isfile(image_path):
print(f"No more images found. Stopped at image number {image_number}.")
break
try:
# 读取图像,并确保图像正确加载
img = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError("Image could not be read, it may be corrupted or in an unsupported format.")
print(f"Processing {image_path}...")
# 图像预处理
img = cv2.resize(img, (28, 28)) # 调整图像大小
img = np.invert(img) # 反色处理
img = img / 255.0 # 归一化
img = img.reshape(1, 28, 28) # 添加批量维度
# 模型预测
prediction = model.predict(img)
predicted_digit = np.argmax(prediction)
print(f"The number is probably a {predicted_digit}")
plt.imshow(img.reshape(28, 28), cmap=plt.cm.binary)
plt.title(f"Predicted Digit: {predicted_digit}")
plt.show()
except Exception as e:
print(f"Error processing image {image_number}: {e}")
image_number += 1

python
#image_gradients_and_canny_edge_detection
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread("canny.jpg", cv2.IMREAD_GRAYSCALE)
lap = cv2.Laplacian(img, cv2.CV_64F, ksize=3)
lap = np.uint8(np.absolute(lap))
sobelX = cv2.Sobel(img, cv2.CV_64F, 1, 0)
sobelY = cv2.Sobel(img, cv2.CV_64F, 0, 1)
edges = cv2.Canny(img,100,200)
sobelX = np.uint8(np.absolute(sobelX))
sobelY = np.uint8(np.absolute(sobelY))
sobelCombined = cv2.bitwise_or(sobelX, sobelY)
titles = ['image', 'Laplacian', 'sobelX', 'sobelY', 'sobelCombined', 'Canny']
images = [img, lap, sobelX, sobelY, sobelCombined, edges]
for i in range(6):
plt.subplot(2, 3, i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
python
#opencv_Background_Subtraction
import numpy as np
import cv2 as cv
cap = cv.VideoCapture('vtest.avi')
#kernel = cv.getStructuringElement(cv.MORPH_ELLIPSE, (3,3))
fgbg = cv.bgsegm.createBackgroundSubtractorMOG()
#fgbg = cv.bgsegm.BackgroundSubtractorGMG()
#fgbg = cv.createBackgroundSubtractorMOG2(detectShadows=True)
#fgbg = cv.createBackgroundSubtractorKNN(detectShadows=True)
while True:
ret, frame = cap.read()
if frame is None:
break
fgmask = fgbg.apply(frame)
#fgmask = cv.morphologyEx(fgmask, cv.MORPH_OPEN, kernel)
cv.imshow('Frame', frame)
cv.imshow('FG MASK Frame', fgmask)
keyboard = cv.waitKey(30)
if keyboard == 'q' or keyboard == 27:
break
cap.release()
cv.destroyAllWindows()滤波啥的变化

感谢阅读🌸