文章目录
文章目录
- [00 写在前面](#00 写在前面)
- [01 基于Python版本的高阶SVD算代码](#01 基于Python版本的高阶SVD算代码)
- [02 HOSVD 的步骤](#02 HOSVD 的步骤)
00 写在前面
高阶奇异值分解(Higher-Order SVD,HOSVD)是一种将传统的奇异值分解(SVD)扩展到高阶张量的方法。它能够将一个高阶张量分解成一个核心张量和一组正交矩阵,类似于将矩阵分解成奇异值矩阵和两个正交矩阵。HOSVD 在多维数据分析、压缩和降维等领域有广泛应用。
01 基于Python版本的高阶SVD算代码
python
import numpy as np
import tensorly as tl
from tensorly.decomposition import tucker
# Create a random 3rd-order tensor
tensor = np.random.rand(3, 4, 5)
# Perform HOSVD (Tucker decomposition)
core, factors = tucker(tensor, ranks=[3, 4, 5])
print("Core tensor shape:", core.shape)
print("Factor matrices shapes:", [factor.shape for factor in factors])
# Reconstruct the tensor
reconstructed_tensor = tl.tucker_to_tensor((core, factors))
# Verify reconstruction accuracy
print("Original tensor shape:", tensor.shape)
print("Reconstructed tensor shape:", reconstructed_tensor.shape)
print("Reconstruction error:", np.linalg.norm(tensor - reconstructed_tensor))高阶奇异值分解 (HOSVD) 介绍
基本概念
HOSVD 的基本思想是将一个 N 维张量 X \mathcal{X} X 分解为一个核心张量 S \mathcal{S} S 和一组因子矩阵 U ( 1 ) , U ( 2 ) , ... , U ( N ) U^{(1)}, U^{(2)}, \ldots, U^{(N)} U(1),U(2),...,U(N) 的乘积,这些因子矩阵是正交的。具体来说,对于一个三阶张量 X \mathcal{X} X,HOSVD 可以表示为:
X = S × 1 U ( 1 ) × 2 U ( 2 ) × 3 U ( 3 ) \mathcal{X} = \mathcal{S} \times_1 U^{(1)} \times_2 U^{(2)} \times_3 U^{(3)} X=S×1U(1)×2U(2)×3U(3)
其中:
- X \mathcal{X} X 是原始张量。
- S \mathcal{S} S 是核心张量。
- U ( i ) U^{(i)} U(i) 是正交矩阵,表示第 i i i 维的因子矩阵。
- × i \times_i ×i 表示在第 i i i 维上的张量-矩阵乘积。
02 HOSVD 的步骤
-
构造模式矩阵:
- 对于每一个模式(维度),将张量展平为矩阵,称为模式矩阵。例如,对于一个三阶张量 X \mathcal{X} X,我们可以得到三个模式矩阵 X ( 1 ) , X ( 2 ) , X ( 3 ) X_{(1)}, X_{(2)}, X_{(3)} X(1),X(2),X(3)。
-
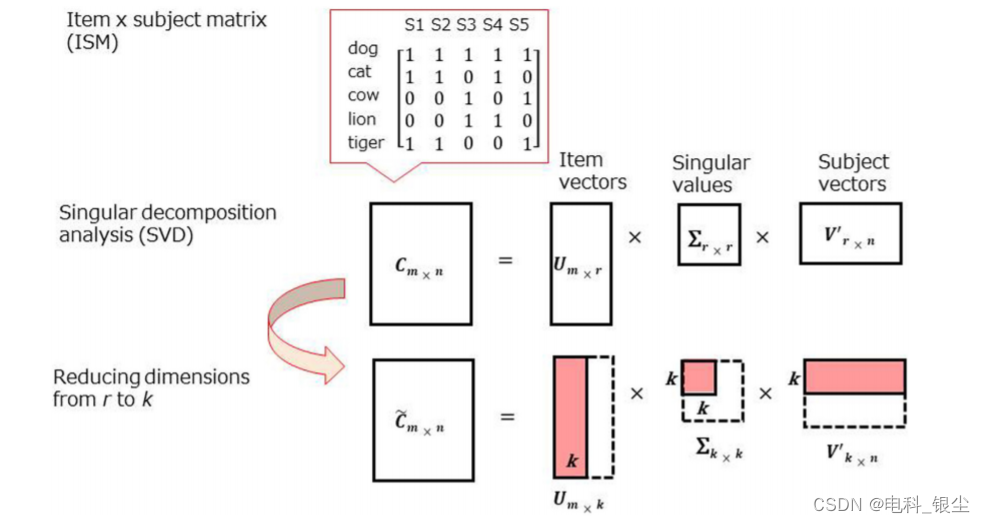
计算奇异值分解:
- 对每个模式矩阵进行奇异值分解(SVD),得到奇异值矩阵和左右奇异矩阵。对于模式矩阵 X ( i ) X_{(i)} X(i),可以得到 X ( i ) = U ( i ) Σ ( i ) ( V ( i ) ) T X_{(i)} = U^{(i)} \Sigma^{(i)} (V^{(i)})^T X(i)=U(i)Σ(i)(V(i))T。
-
构造因子矩阵:
- 从每个模式矩阵的 SVD 结果中提取左奇异矩阵 U ( i ) U^{(i)} U(i) 作为对应维度的因子矩阵。
-
计算核心张量:
- 使用张量-矩阵乘积计算核心张量 S \mathcal{S} S,即 S = X × 1 ( U ( 1 ) ) T × 2 ( U ( 2 ) ) T × 3 ( U ( 3 ) ) T \mathcal{S} = \mathcal{X} \times_1 (U^{(1)})^T \times_2 (U^{(2)})^T \times_3 (U^{(3)})^T S=X×1(U(1))T×2(U(2))T×3(U(3))T。