留意后续更新,欢迎关注微信公众号:组学之心
Diffusion模型的微调和引导
-
微调(fine-tuning):
从一个已经训练过的模型开始训练,我们就可以从一个学会如何"去噪"的模型开始训练,相对于随机初始化的模型也许是一个更好的起点。如果新的数据和原来模型训练用的数据比较相似的死后,微调的效果会很好。
-
引导(guidance):
在生成模型中,如果没有提供特定的条件(比如图像的某些特征或文本的某些关键词),模型通常不能控制生成的内容。因此,我们可以训练一个"条件模型",通过给模型额外的输入信息来控制生成过程。但是,如果我们使用的是一个没有条件的模型,该怎么实现相同的控制效果呢?我们可以采用一种叫做"引导"的方法。简单来说,在生成过程中,模型会一步步地生成内容,每一步生成的结果都会通过一些"引导函数"来评估,并根据评估结果进行修改,使得最终生成的内容符合我们的预期。"引导函数"可以是任何能够评估和调整生成结果的函数,这其中有很大的设计空间和灵活性。
-
条件生成:
引导方法可以让我们从一个没有条件的模型中获得更多的控制和收益。如果我们在训练模型时有一些额外的信息(比如图像的类别或文字描述),我们可以直接把这些信息输入模型,让模型利用这些信息进行预测。这样,我们就创建了一个"条件模型",在生成内容时可以通过输入相关的信息来控制生成过程。有很多方法可以将条件信息输入到模型中。例如:额外通道输入:我们可以把这些条件信息作为额外的通道输入到UNet模型中,这时候条件信息通常和图像有相同的形状(shape),这样模型就能更好地理解和利用这些信息。交叉注意力机制:我们可以在模型中添加一些网络层,这些层带有交叉注意力机制,专门用来处理和结合这些条件信息。交叉注意力机制可以帮助模型在生成内容时更好地关注和利用这些条件信息。
来实际操作一下
1.环境准备
安装好必须的python库
python
pip install -qq diffusers datasets accelerate wandb open-clip-torch
import numpy as np
import torch
import torch.nn.functional as F
import torchvision
from datasets import load_dataset
from diffusers import DDIMScheduler, DDPMPipeline
from matplotlib import pyplot as plt
from PIL import Image
from torchvision import transforms
from tqdm.auto import tqdm
device = ("mps" if torch.backends.mps.is_available() else "cuda" if torch.cuda.is_available() else "cpu")在终端中输入huggingface-cli login,登录hugging face的WRITE的Access Tokens,后续上传模型的时候用到。
2.先用管线载入一个预训练过的模型
这是google开发的人脸生成模型,用它来练练手,作图展示一下模型效果
python
image_pipe = DDPMPipeline.from_pretrained("google/ddpm-celebahq-256")
image_pipe.to(device)
images = image_pipe().images
plt.imshow(images[0])
plt.axis('off')
plt.show()
3.使用可以更快的采样DDIM调度器,加速模型计算
DDIMScheduler相对于DDPM,减少了迭代周期来产生不错的采样样本。用几张随即噪音图像进行循环采样,并观察每一步输入图像和预测结果的"去噪"版本
python
#创建一个新的调度器来对比效果
scheduler = DDIMScheduler.from_pretrained("google/ddpm-celebahq-256")
scheduler.set_timesteps(num_inference_steps=40)
# 随机生成4张256×256的彩色图
x = torch.randn(4, 3, 256, 256).to(device)
for i, t in tqdm(enumerate(scheduler.timesteps)):
# 预测噪声并计算更新后的样本
with torch.no_grad():
noise_pred = image_pipe.unet(scheduler.scale_model_input(x, t), t)["sample"]
x = scheduler.step(noise_pred, t, x).prev_sample
# 每隔10步或最后一步显示图像
if i % 10 == 0 or i == len(scheduler.timesteps) - 1:
fig, axs = plt.subplots(1, 2, figsize=(12, 5))
# 当前图像
grid = torchvision.utils.make_grid(x, nrow=4).permute(1, 2, 0)
axs[0].imshow(grid.cpu().clip(-1, 1) * 0.5 + 0.5)
axs[0].set_title(f"Current x (step {i})")
# 去噪图像
grid = torchvision.utils.make_grid(scheduler.step(noise_pred, t, x).pred_original_sample, nrow=4).permute(1, 2, 0)
axs[1].imshow(grid.cpu().clip(-1, 1) * 0.5 + 0.5)
axs[1].set_title(f"Predicted denoised images (step {i})")
plt.savefig(f"00zuxuezhixin/finetuning_guidance/step_{i}.png")
plt.show()




可以看出一开始预测结果不好,随着模型的推理,预测效果输出逐步改善。也可以直接修改管线载入的模型中的调度器,做后续的任务
python
image_pipe.scheduler = scheduler
images = image_pipe(num_inference_steps=40).images开始微调
怎么用新的训练数据重新训练模型,来生成图像呢?这里先加载Vintage Faces人脸数据集(但不是真实人脸的风格),用它来进行微调。
1.加载数据集
python
dataset = load_dataset("Norod78/Vintage-Faces-FFHQAligned", split="train")
# 数据增强
preprocess = transforms.Compose([
transforms.Resize((256, 256)),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
])
# 定义数据转换函数
def transform(examples):
images = []
for image in examples["image"]:
try:
images.append(preprocess(image.convert("RGB")))
except Exception as e:
print(f"Error processing image: {e}")
return {"image": images}
# 应用数据转换
dataset.set_transform(transform)
# 自定义 collate 函数,过滤掉 NoneType 数据
def collate_fn(batch):
batch = [item for item in batch if item["image"] is not None and len(item["image"]) > 0]
return {"image": torch.stack([item["image"] for item in batch])}
train_dataloader = torch.utils.data.DataLoader(dataset, batch_size=4, shuffle=True, collate_fn=collate_fn)
# 看看一个批次的图像长什么样
print("Previewing batch:")
batch = next(iter(train_dataloader))
grid = torchvision.utils.make_grid(batch["image"], nrow=4)
plt.imshow(grid.permute(1, 2, 0).cpu().clip(-1, 1) * 0.5 + 0.5)
plt.axis('off')
plt.show()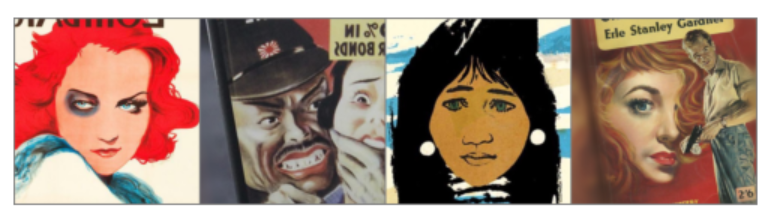
2.训练循环
看看训练循环,首先把想要优化的目标参数设定为image_pipe.unet.parameters(),来更新预训练过的模型权重。
python
image_pipe = DDPMPipeline.from_pretrained("google/ddpm-celebahq-256")
image_pipe.to(device)
scheduler = DDIMScheduler.from_pretrained("google/ddpm-celebahq-256")
image_pipe.scheduler = scheduler
# 设置超参数
num_epochs = 2
grad_accumulation_steps = 2
# 初始化优化器
optimizer = torch.optim.AdamW(image_pipe.unet.parameters(), lr=1e-5)
# 存储损失值
losses = []
# 训练循环
for epoch in range(num_epochs):
epoch_losses = []
for step, batch in tqdm(enumerate(train_dataloader), total=len(train_dataloader)):
clean_images = batch["image"].to(device)
noise = torch.randn_like(clean_images) #随机生成噪音,加到图像上
# 随机选取一个时间步
timesteps = torch.randint(0, image_pipe.scheduler.num_train_timesteps, (clean_images.size(0),), device=device)
noisy_images = image_pipe.scheduler.add_noise(clean_images, noise, timesteps) # 前向过程
noise_pred = image_pipe.unet(noisy_images, timesteps)[0] #使用带噪音的图像进行网络预测
loss = F.mse_loss(noise_pred, noise) # 对真正的噪音和预测结果进行比较,这里是预测噪音
losses.append(loss.item())
epoch_losses.append(loss.item())
loss.backward()
## 进行梯度累积,在积累到一定步数后更新模型权重
if (step + 1) % grad_accumulation_steps == 0:
optimizer.step()
optimizer.zero_grad()
avg_loss = sum(epoch_losses) / len(epoch_losses)
print(f"Epoch {epoch} average loss: {avg_loss}")
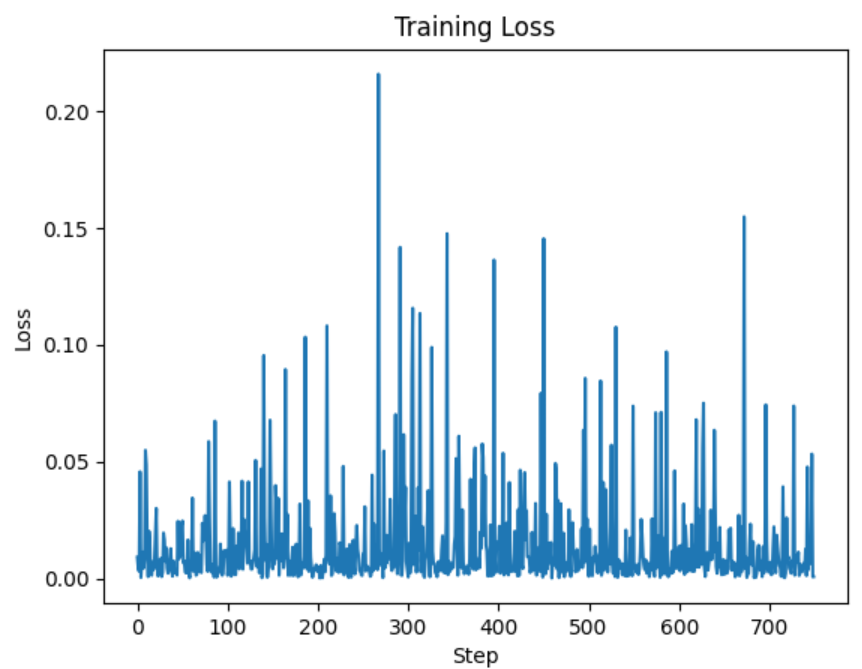
# 绘制损失曲线
plt.plot(losses)
plt.xlabel('Step')
plt.ylabel('Loss')
plt.title('Training Loss')
plt.savefig(f"00zuxuezhixin/finetuning_guidance/finetuning_test.png")
plt.show()可以看出损失曲线很混乱,因为每次迭代只用了4个样本,并且添加到的噪声水平也是随机的,对训练来说并不理想。可以用梯度类似来弥补,这样可以得到与使用更大的batch一样的收益,又不会造成内存爆满。具体的做法是运行多几次loss.backward()再调用optimizer.stzer.zero_grad()。梯度累计hugging face会替我们做。
来看看调整后的模型生成的图像:
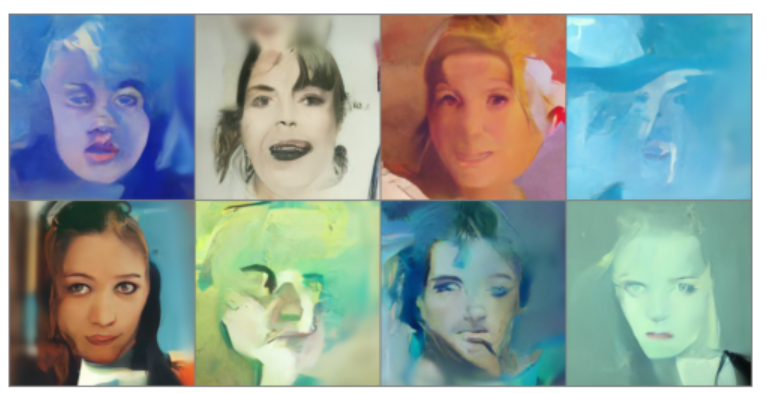
抽象派大师!可见它在努力的把真人往另一个画风拟合中...
3.使用一个最小化示例程序来微调模型
下载一个最小实例化程序,它会提示要用wandb来操作,我们只要去到wandb官网创建一个账号,在账号设置里创建API Key,在运行脚本的时候会提示我们输入该API Key,然后就可以实现wandb微调。
python
## 下载微调用的脚本:
wget https://github.com/huggingface/diffusion-models-class/raw/main/unit2/finetune_model.py
## 运行脚本,在Vintage Face数据集上训练脚本
## 在终端里跑:
python 00zuxuezhixin/finetuning_guidance/finetune_model.py --image_size 128 --batch_size 8 --num_epochs 16 --grad_accumulation_steps 2 --start_model "google/ddpm-celebahq-256" --dataset_name "Norod78/Vintage-Faces-FFHQAligned" --wandb_project 'dm-finetune' --log_samples_every 100 --save_model_every 1000 --model_save_name 'vintageface'4.保存和载入微调后的管线
将微调好的模型保存到hugging face,我们在开始的时候就登录了,用以下代码完成模型的保存和上传。
python
image_pipe.save_pretrained("00zuxuezhixin/finetuning_guidance/finetuned_model")
from huggingface_hub import HfApi, create_repo, get_full_repo_name
model_name = "ddpm-celebahq-finetuned-vintage-2epochs"
local_folder_name = "00zuxuezhixin/finetuning_guidance"
description = "finetuning_practice_vintage"
hub_model_id = get_full_repo_name(model_name)
create_repo(hub_model_id)
api = HfApi()
api.upload_folder(
folder_path=f"{local_folder_name}/scheduler", path_in_repo="", repo_id=hub_model_id
)
api.upload_folder(
folder_path=f"{local_folder_name}/unet", path_in_repo="", repo_id=hub_model_id
)
api.upload_file(
path_or_fileobj=f"{local_folder_name}/model_index.json",
path_in_repo="model_index.json",
repo_id=hub_model_id,
)扩散模型的引导
上一步微调的使用的数据太大,我的4060跑了挺久的...换个数据来进行后续操作。本部分使用在LSUM bedrooms数据集(房间样式的图像数据)上训练并在WikiArt数据集(艺术作品中的人脸图片数据)上进行一轮微调的新模型。下载该模型,从模型中采样图像,并通过DDIM调度器进行推理,看看他的生成效果:
python
import torch
from tqdm import tqdm
import torchvision
import matplotlib.pyplot as plt
from transformers import DDPMPipeline, DDIMScheduler
# 加载预训练的pipeline
pipeline_name = "johnowhitaker/sd-class-wikiart-from-bedrooms"
image_pipe = DDPMPipeline.from_pretrained(pipeline_name).to(device)
# 使用DDIM调度器在40步内采样一些图像
scheduler = DDIMScheduler.from_pretrained(pipeline_name)
scheduler.set_timesteps(num_inference_steps=40)
# 随机起始点(8张图像的批次)
x = torch.randn(8, 3, 256, 256).to(device)
# 最小采样循环
for i, t in tqdm(enumerate(scheduler.timesteps)):
model_input = scheduler.scale_model_input(x, t)
with torch.no_grad():
noise_pred = image_pipe.unet(model_input, t)["sample"]
x = scheduler.step(noise_pred, t, x).prev_sample
# 展示结果
grid = torchvision.utils.make_grid(x, nrow=4)
plt.figure(figsize=(10, 10))
plt.imshow(grid.permute(1, 2, 0).cpu().clip(0, 1))
plt.axis('off')
plt.show()
生成的图像效果很魔幻,通常情况下,想要判断微调的效果并不容易,而且就算模型的性能很好,但在不同的应用场景下,它的水平也会有所变化。在这里来完全重新训练一个模型来适应新的数据集,此时就需要使用较大的学习率并进行长时间的训练。一般比较难从损失曲线中看出模型是否得到了改善,生成的样本也清晰的显示出不同风格的变迁,它在努力的变迁(从用房间样式数据集训练的模型往艺术作品中的人脸变迁),尽管看起来很魔幻。接下来对这种模型进行额外的引导。
1.来开始实战一下
如果想要对生成的样本进行控制该怎么做呢?如果想让生成的图片偏向于靠近某种颜色该怎么做呢?我们可以用引导,在采样的过程中施加额外的控制。首先就需要去定义我们希望优化的指标,这个指标可以是损失值。
下面的函数就是来让生成的图片趋近于晚霞粉紫色的示例:
python
def color_loss(images, target_color=(0.8, 0.4, 0.6)):
"""
给定目标颜色(R, G, B),返回图像像素与该颜色的平均距离损失。
"""
target = (
torch.tensor(target_color).to(images.device) * 2 - 1
) # 将目标颜色映射到(-1, 1)
target = target[None, :, None, None] # 调整形状以与图像匹配 (b, c, h, w)
error = torch.abs(images - target).mean() # 图像像素与目标颜色的平均绝对误差
return error接下来需要修改采样循环并执行以下操作:
- 创建新的输入图像,把它的requires_grad属性设置为True
- 计算"去噪"后的图像,并传递给损失函数
- 计算损失函数对输入图像的梯度
- 在使用调度器之前,先用计算出来的梯度修改输入图像,使得输入图像朝着最小化损失值的方向改进。
实现的方法之一是:先将输入图像的requires_grad属性设置为True,然后传递给UNet并计算去噪后的图像
python
# 定义指导损失系数
guidance_loss_scale = 40
# 随机起始点(4张图像的批次)
x = torch.randn(4, 3, 256, 256).to(device)
# 采样循环
for i, t in tqdm(enumerate(scheduler.timesteps), total=len(scheduler.timesteps)):
# 设置 requires_grad 在模型前向传播之前
x = x.detach().requires_grad_()
model_input = scheduler.scale_model_input(x, t)
# 预测(这次带梯度)
noise_pred = image_pipe.unet(model_input, t)["sample"]
# 获取预测的图像
x0 = scheduler.step(noise_pred, t, x).pred_original_sample
# 计算损失
loss = color_loss(x0) * guidance_loss_scale
if i % 10 == 0:
print(i, "loss:", loss.item())
# 获取梯度
cond_grad = -torch.autograd.grad(loss, x)[0]
# 根据梯度修改输入图像
x = x.detach() + cond_grad
# 使用调度器进行步骤
x = scheduler.step(noise_pred, t, x).prev_sample
# 创建网格并展示
grid = torchvision.utils.make_grid(x, nrow=4)
im = grid.permute(1, 2, 0).cpu().clip(-1, 1) * 0.5 + 0.5
plt.imshow(im)
plt.axis('off')
plt.savefig(f"00zuxuezhixin/finetuning_guidance/guidance_test.png")
plt.show()代码输出的损失是:
0%| | 0/40 00:00\0 loss: 17.13970184326172
28%|██▊ | 11/40 01:08\<03:03, 6.34s/it10 loss: 9.006878852844238
52%|█████▎ | 21/40 02:11\<01:59, 6.28s/it20 loss: 8.319286346435547
75%|███████▌ | 30/40 03:06\<01:02, 6.21s/it30 loss: 8.618431091308594
100%|██████████| 40/40 04:12\<00:00, 6.32s/it
生成的图像:

这种方法的输出更接近于训练模型所使用的数据。增大guidance_loss_scale可以增强颜色迁移的效果。
2.CLIP引导
进阶玩一下,能不能直接用语言描述得到自己想要的图片呢?
可以借助CLIP,它是OpenAI开发的模型,使得我们能够对图片和文字说明进行比较,量化一张图和一段文字的匹配程度。这个过程是可微的,所以可以将其作为损失函数来引导扩散模型。基本流程:
- 文本嵌入:将文本提示语输入CLIP模型,得到512维的文本嵌入向量。
- 图片嵌入:生成多个版本的预测去噪图片,并将这些图片输入CLIP模型,得到图片的嵌入向量。
- 计算匹配度:比较图片嵌入和文本嵌入,计算它们的匹配度(度量方法是great circle distance squared)。
- 计算损失和梯度:计算匹配度损失,然后对带噪输入图像计算梯度。
- 更新输入图像:在使用调度器更新输入图像之前,用计算出的梯度修正图像。
具体想学习CLIP的底层逻辑,请看https://github.com/mlfoundations/open_clip
python
import open_clip
clip_model, _, preprocess = open_clip.create_model_and_transforms("ViT-B-32", pretrained="openai")
clip_model.to(device)
# 图像增强处理,使得数据能够适配CLIP模型
tfms = torchvision.transforms.Compose(
[
torchvision.transforms.RandomResizedCrop(224),
torchvision.transforms.RandomAffine(5),
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.Normalize(mean=(0.48145466, 0.4578275, 0.40821073),
std=(0.26862954, 0.26130258, 0.27577711),),
]
)
# 定义损失函数,用于获取图像特征,然后和提示文字的特征进行对比
# 这里引导的采样循环看起来和前面的例子中的类似,只不过是把color_loss()函数换成了新的基于CLIP的损失函数
def clip_loss(image, text_features):
image_features = clip_model.encode_image(tfms(image))
input_normed = torch.nn.functional.normalize(image_features.unsqueeze(1), dim=2)
embed_normed = torch.nn.functional.normalize(text_features.unsqueeze(0), dim=2)
dists = (input_normed.sub(embed_normed).norm(dim=2).div(2).arcsin().pow(2).mul(2))
return dists.mean()
python
#文本嵌入
prompt = "Red Rose,red flower painting"
text = open_clip.tokenize([prompt]).to(device)
with torch.no_grad(), torch.cuda.amp.autocast():
text_features = clip_model.encode_text(text)
# 随机起始点(4张图像的批次)
x = torch.randn(4, 3, 256, 256).to(device)
# 定义参数
guidance_scale = 8
n_scale = 4
scheduler.set_timesteps(50) # 调大timesteps可以让指导发挥更多的作用
# 采样循环
for i, t in tqdm(enumerate(scheduler.timesteps), total=len(scheduler.timesteps)):
model_input = scheduler.scale_model_input(x, t)
# 预测噪声残差
with torch.no_grad():
noise_pred = image_pipe.unet(model_input, t)["sample"]
cond_grad = 0
for cut in range(n_scale):
# 设置x的梯度
x = x.detach().requires_grad_()
# 获取预测的x0
x0 = scheduler.step(noise_pred, t, x).pred_original_sample
# 计算损失
loss = clip_loss(x0, text_features) * guidance_scale
# 获取梯度(按n_cuts缩放,因为我们需要平均值)
cond_grad -= torch.autograd.grad(loss, x)[0] / n_scale
if i % 25 == 0:
print("Step:", i, ", Guidance loss:", loss.item())
# 根据梯度修改x
alpha_bar = scheduler.alphas_cumprod[i]
x = (x.detach() + cond_grad * alpha_bar.sqrt())
# 使用调度器进行步骤
x = scheduler.step(noise_pred, t, x).prev_sample
# 展示图象
grid = torchvision.utils.make_grid(x.detach(), nrow=4)
im = grid.permute(1, 2, 0).cpu().clip(-1, 1) * 0.5 + 0.5
plt.imshow(im)
plt.axis('off')
plt.savefig(f"00zuxuezhixin/finetuning_guidance/guidance_CLIP_test.png")
plt.show()
有点像红玫瑰,但不多...
3.参数理解
guidance_scale和n_scale是两个重要的超参数,作用如下:
- guidance_scale:guidance_scale参数控制文本指导损失的强度。它的作用是放大或缩小由文本描述引导生成图像的影响。
①指导损失放大:通过对损失值进行放大,使得生成的图像更加符合文本描述。值越大,生成的图像会越接近文本描述,但如果值过大,可能会导致图像质量下降或者生成图像过度适应描述。
②权衡生成质量和描述匹配度:需要在生成图像的质量和对文本描述的匹配度之间找到一个平衡。一个合理的guidance_scale值可以生成既高质量又符合描述的图像。 - n_scale:n_scale参数控制在每个采样步骤中进行图像裁剪的次数。
①图像裁剪:在每个采样步骤中对图像进行多次裁剪,将这些裁剪后的图像片段输入CLIP模型进行匹配度计算。这有助于提升生成图像的多样性和丰富性。
②损失平均化:通过对多个裁剪后的图像计算损失并取平均值,可以获得更稳定和鲁棒的梯度信息,从而更好地引导图像生成。
此外,这里使用alpha_bar.sqrt()作为因子来缩放梯度,可以有效地适应扩散过程的动态变化,实现更稳定和自然的图像生成。但需要仔细的参数调试和实验,才能优化效果。
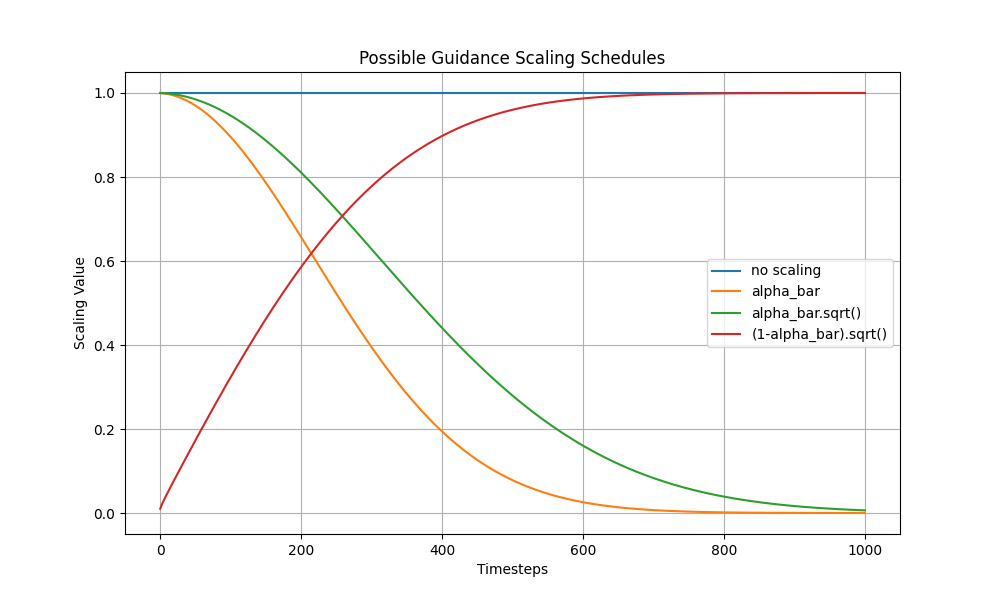
可以做一个图来看看不同梯度的缩放带来的影响:
python
plt.figure(figsize=(10, 6))
plt.plot([1 for a in scheduler.alphas_cumprod], label="no scaling")
plt.plot([a for a in scheduler.alphas_cumprod], label="alpha_bar")
plt.plot([a.sqrt() for a in scheduler.alphas_cumprod], label="alpha_bar.sqrt()")
plt.plot([(1 - a).sqrt() for a in scheduler.alphas_cumprod], label="(1-alpha_bar).sqrt()")
plt.legend()
plt.title("Possible Guidance Scaling Schedules")
plt.xlabel("Timesteps")
plt.ylabel("Scaling Value")
plt.grid(True)
plt.savefig(f"00zuxuezhixin/finetuning_guidance/guidance_CLIP_Timesteps_alphas_cumprod.png")
plt.show()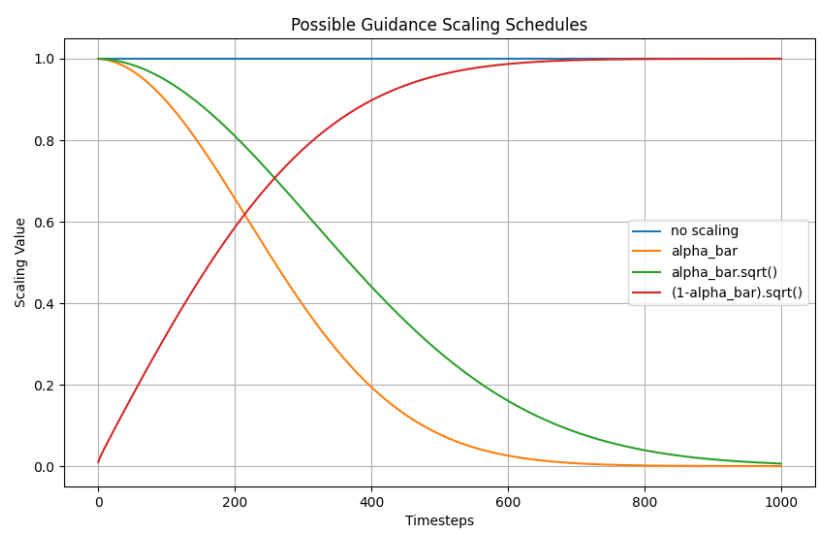
No scaling:由于没有缩放,所有时间步中的缩放因子都是1,因此这条线是一条水平线。
alpha_bar:随时间步的增加而减小,说明随着生成过程的推进,噪声水平逐渐降低。
alpha_bar.sqrt():随着时间步的增加也逐渐减小,但比alpha_bar更缓慢地减小。
(1 - alpha_bar).sqrt():这条曲线随着时间步的增加而增大,表示随着生成过程的推进,1-alpha_bar的影响逐渐增加。
通过这些曲线,我们可以理解在不同的缩放调度方案下,指导损失(gradient)在生成过程中的作用。选择合适的缩放调度方案对于生成质量和效率非常重要。