摘要: 想让你的 ESP32 不再仅仅是控制灯光的工具吗? 本文将带你使用 ESP32 开发板、步进电机和简单的机械结构打造一个能够自动写字的机器人。我们将深入浅出地讲解硬件连接、软件代码以及控制逻辑,并提供完整的项目代码和电路图,即使是 Arduino 和物联网开发的初学者也能轻松上手。
关键词: ESP32, 步进电机, 写字机器人, Arduino, 物联网
一、 项目概述
本项目利用 ESP32 强大的性能和丰富的接口资源,精确控制两个步进电机分别驱动 X-Y 轴的移动,从而引导笔尖在纸面上书写文字。
1.1 项目目标
- 实现 ESP32 对步进电机的精确控制,实现流畅的文字书写。
- 通过程序控制,使机器人能够按照预设轨迹书写文字。
- 提供友好的人机交互界面,方便用户输入文字并控制书写。
1.2 项目特色
- 低成本: 仅需使用 ESP32 和常见的步进电机驱动模块,成本低廉。
- 易于实现: 项目代码基于 Arduino 平台开发,简单易懂,适合初学者学习。
- 扩展性强: 可以通过添加传感器、网络模块等,实现更加丰富的功能,例如远程控制、图像识别等。
二、 硬件设计
2.1 硬件清单
- ESP32 开发板 x 1
- 步进电机驱动器 (A4988 或 DRV8825) x 2
- 步进电机 (42 步进电机) x 2
- 笔架结构 (可参考 3D 打印模型或自行设计)
- 电源 (5V)
- 面包板
- 杜邦线
2.2 电路连接
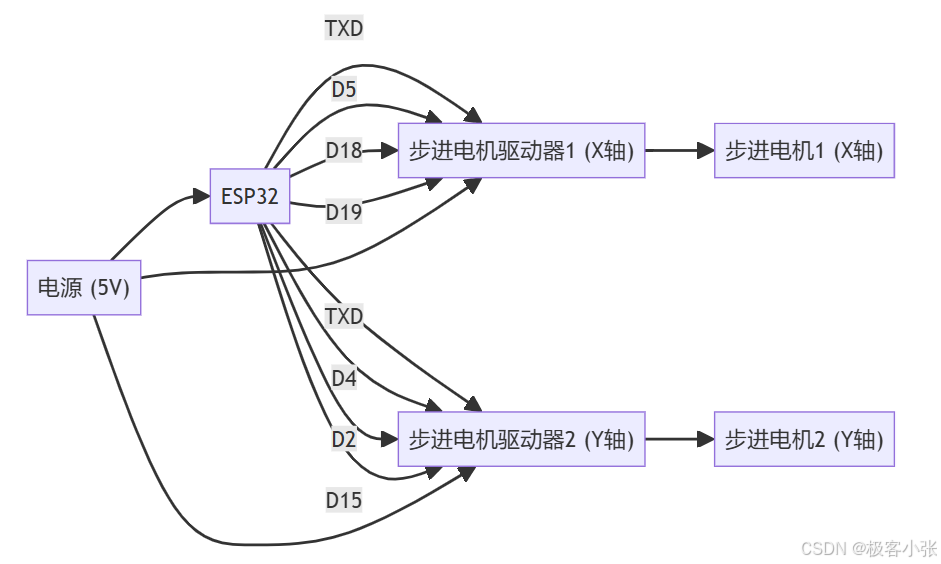
说明:
- ESP32 的 TXD 引脚连接到两个驱动器的 EN 引脚,用于控制电机的使能状态。
- D5、D18、D19 引脚分别连接到 X 轴驱动器的 DIR、STEP、SLEEP 引脚,用于控制 X 轴电机的方向、步进和休眠状态。
- D4、D2、D15 引脚分别连接到 Y 轴驱动器的 DIR、STEP、SLEEP 引脚,用于控制 Y 轴电机的方向、步进和休眠状态。
2.3 机械结构
本项目采用简单的笔架结构,通过两个步进电机分别控制 X 轴和 Y 轴的移动,从而带动笔尖在纸面上书写。
三、 软件设计
3.1 开发环境
- Arduino IDE
- ESP32 开发板支持包
3.2 库文件
- Stepper.h: Arduino IDE 自带的步进电机控制库,用于控制步进电机的基本运转。
- AccelStepper.h: 提供加速度控制的步进电机库,使电机运行更加平滑,减少震动和噪音。
3.3 代码实现
cpp
#include <Stepper.h>
#include <AccelStepper.h>
// 定义步进电机引脚
#define X_STEP_PIN 5
#define X_DIR_PIN 18
#define X_ENABLE_PIN 19
#define Y_STEP_PIN 4
#define Y_DIR_PIN 2
#define Y_ENABLE_PIN 15
// 定义步进电机参数
#define STEPS_PER_MM 20 // 每毫米步数,根据实际情况调整
#define MAX_SPEED 1000 // 最大速度
#define ACCELERATION 500 // 加速度
// 创建步进电机对象
AccelStepper stepperX(AccelStepper::DRIVER, X_STEP_PIN, X_DIR_PIN);
AccelStepper stepperY(AccelStepper::DRIVER, Y_STEP_PIN, Y_DIR_PIN);
void setup() {
Serial.begin(115200);
// 初始化步进电机参数
stepperX.setMaxSpeed(MAX_SPEED);
stepperX.setAcceleration(ACCELERATION);
stepperY.setMaxSpeed(MAX_SPEED);
stepperY.setAcceleration(ACCELERATION);
// 使能步进电机
digitalWrite(X_ENABLE_PIN, LOW);
digitalWrite(Y_ENABLE_PIN, LOW);
}
void loop() {
// 此处添加控制逻辑,例如:
// moveTo(10, 10); // 移动到坐标 (10, 10)
// drawLine(0, 0, 20, 20); // 画一条从 (0, 0) 到 (20, 20) 的直线
}
// 移动到指定坐标
void moveTo(float x, float y) {
// 将坐标转换为步数
long targetX = x * STEPS_PER_MM;
long targetY = y * STEPS_PER_MM;
// 控制电机移动到目标位置
stepperX.moveTo(targetX);
stepperY.moveTo(targetY);
// 等待电机移动完成
while (stepperX.distanceToGo() != 0 || stepperY.distanceToGo() != 0) {
stepperX.run();
stepperY.run();
}
}
// 画一条直线
void drawLine(float x1, float y1, float x2, float y2) {
// 计算直线长度
float distance = sqrt(pow(x2 - x1, 2) + pow(y2 - y1, 2));
// 计算步数
long steps = distance * STEPS_PER_MM;
// 计算 X 轴和 Y 轴每步的增量
float xInc = (x2 - x1) / steps;
float yInc = (y2 - y1) / steps;
// 循环执行步进
for (long i = 0; i <= steps; i++) {
moveTo(x1 + xInc * i, y1 + yInc * i);
}
}代码说明:
- 包含头文件: 引入
Stepper.h和AccelStepper.h库文件,用于控制步进电机。 - 定义引脚和参数: 定义步进电机连接的引脚以及电机参数,例如每毫米步数、最大速度和加速度。
- 创建步进电机对象: 创建
AccelStepper对象,分别代表 X 轴和 Y 轴的步进电机。 - 设置电机参数: 在
setup()函数中初始化步进电机的最大速度和加速度。 - 使能电机: 将电机使能引脚设置为低电平,使能电机。
- 控制逻辑: 在
loop()函数中添加控制逻辑,例如调用moveTo()函数移动到指定坐标,或调用drawLine()函数画一条直线。 - 移动到指定坐标:
moveTo()函数接收目标坐标作为参数,将坐标转换为步数,然后控制电机移动到目标位置。 - 画一条直线:
drawLine()函数接收直线的起点和终点坐标作为参数,计算直线长度和步数,然后循环执行步进,使笔尖沿着直线移动。
使用方法:
- 将代码上传到 ESP32 开发板: 将上述代码复制到 Arduino IDE 中,选择正确的开发板型号和端口号,然后点击上传按钮将代码上传到 ESP32 开发板。
- 打开串口监视器: 上传完成后,打开 Arduino IDE 的串口监视器,选择合适的波特率 (例如 115200)。
- 输入指令控制电机: 在串口监视器中输入指令控制电机,例如:
M10,10将笔尖移动到坐标 (10, 10)。L0,0,20,20画一条从 (0, 0) 到 (20, 20) 的直线。
- 观察机器人书写: 观察机器人根据指令进行书写,并根据需要调整代码中的参数,例如步进电机参数、坐标值等。
注意:
- 在运行代码之前,请确保已将步进电机、驱动器和 ESP32 正确连接,并将笔尖放置在纸面的合适位置。
- 可以根据实际需要修改代码中的指令格式和控制逻辑,例如添加更多指令控制电机速度、加速度等。
- 可以使用不同的字体库和算法将文字转换为坐标点,实现更加复杂的文字书写。
进阶功能:
- 添加 LCD 显示屏: 可以添加一个 LCD 显示屏,用于显示当前坐标、输入文字等信息,提升用户体验。
- 使用蓝牙或 Wi-Fi 控制: 可以使用蓝牙模块或 Wi-Fi 模块,实现手机或电脑对机器人的无线控制。
- 结合图像识别: 可以添加摄像头模块,使用图像识别技术识别文字或图案,实现更加智能的书写功能。
总结:
本文介绍了如何使用 ESP32、步进电机和简单的机械结构打造一个能够自动写字的机器人。通过学习本文,读者可以了解到步进电机的控制原理、基本的 Arduino 编程知识以及简单的机械结构设计,为进一步学习机器人和物联网开发奠定基础。