目录
1.课题概述
基于PID控制器的六自由度串联机器人控制系统的simulink建模与仿真。
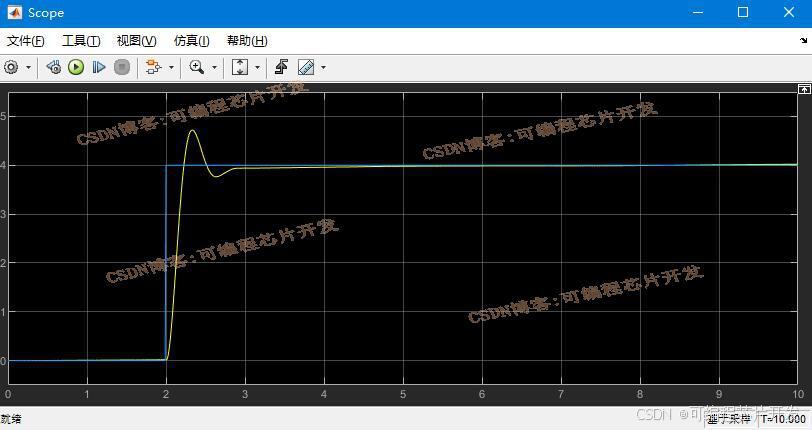
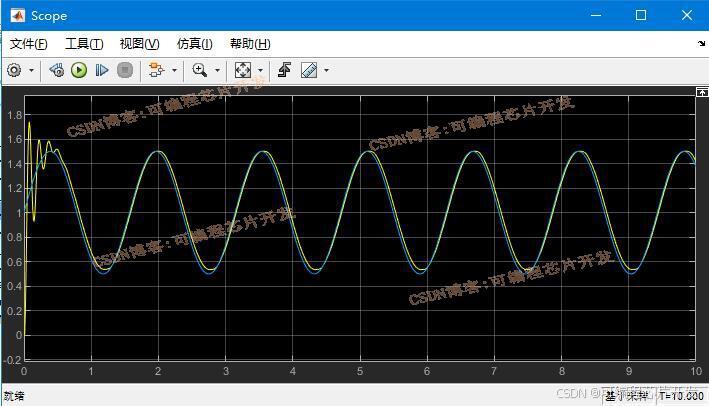
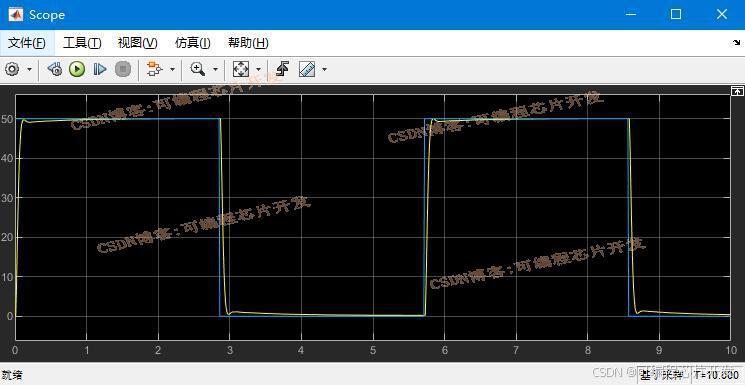
2.系统仿真结果
(完整程序运行后无水印)
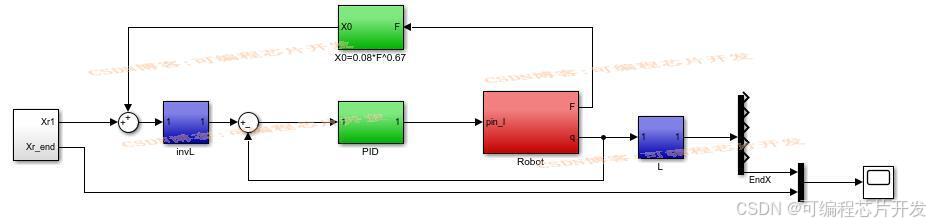
3.核心程序与模型
版本:MATLAB2022a
08_068m
4.系统原理简介
六自由度串联机器人控制系统是机器人学中的一个核心问题,其中PID控制器因其简单、实用和易于调整的特点,被广泛应用于机器人关节的位置、速度或力矩控制中。PID控制器通过结合比例(P)、积分(I)、微分(D)三种控制策略,有效地减小系统误差,提高系统的响应速度和稳定性。
PID控制器的工作原理基于误差信号的连续反馈,通过比较系统输出与期望参考信号的差异(误差),并据此计算出控制信号以减小误差。其输出控制信号u(t)可由下式给出:
六自由度串联机器人通常由一系列连杆和关节组成,每个关节由电机驱动,具有独立的旋转或直线移动自由度。机器人动力学模型描述了关节驱动力与机器人末端执行器位姿之间的关系。对于每个关节,动力学方程可简化为:
将PID控制策略应用于机器人关节,目标是使关节位置q跟踪期望轨迹qd。首先,定义关节位置误差为eq=qd−q,然后通过PID控制器计算出所需关节驱动力τ:

这里,eq、e˙q分别是关节位置误差及其时间导数(误差速度)。通过闭环反馈控制,PID控制器不断调整关节驱动力,以减小关节位置误差。
虽然PID控制简单有效,但在面对复杂机器人动力学、非线性特性和不确定性时,单一的PID控制器可能不足以达到最优控制效果。因此,研究者常结合其他控制策略,如自适应控制、滑模控制、模糊控制或模型预测控制等,以增强系统的鲁棒性和适应性。
5.完整工程文件
v
v