0.简介
基于时序差分算法的强化学习算法除了Sarsa算法以外还有一种著名算法为Q-learning算法,为离线策略算法,与在线策略算法Sarsa算法相比,其时序差分更新方式变为
Q(St,At)←Q(St,At)+αRt+1+γmaxaQ(St+1,a)−Q(St,At)
对于 Sarsa 来说:
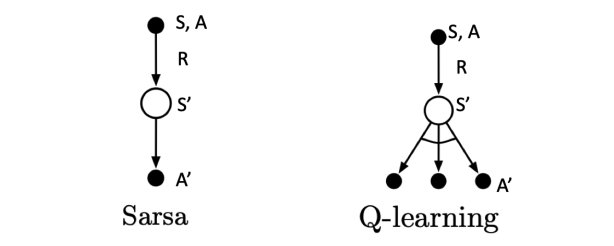
- 1)在状态 s' 时,就知道了要采取那个动作 a',并且真的采取了这个动作
- 2)当前动作 a 和下一个动作 a' 都是 根据 ϵ𝜖 -贪婪策略选取的,因此称为on-policy学习
对于 Q-Learning:
- 1)在状态s'时,只是计算了 在 s' 时要采取哪个 a' 可以得到更大的 Q 值,并没有真的采取这个动作 a'。
- 2)动作 a 的选取是根据当前 Q 网络以及 ϵ𝜖-贪婪策略,即每一步都会根据当前的状况选择一个动作A,目标Q值的计算是根据 Q 值最大的动作 a' 计算得来,因此为 off-policy 学习。
1.导入相关库
python
import matplotlib.pyplot as plt
import numpy as np
from tqdm import tqdm2.悬崖漫步环境实现环节
python
class cliffwalking():
def __init__(self,colnum,rownum,stepr,cliffr,initx,inity):
self.colnum=colnum
self.rownum=rownum
self.stepr=stepr
self.cliffr=cliffr
self.initx=initx
self.inity=inity
self.disaster=list(range((self.rownum-1)*self.colnum+1,self.rownum*self.colnum-1))
self.end=[self.rownum*self.colnum-1]
self.x=self.initx
self.y=self.inity
def step(self,action):
change=[[0,-1],[0,1],[-1,0],[1,0]]#change[0]上;change[1]下;change[2]左;change[3]右;坐标系原点(0,0)在左上角
self.x=min(self.colnum-1,max(0,self.x+change[action][0]))
self.y=min(self.rownum-1,max(0,self.y+change[action][1]))
nextstate=self.y*self.colnum+self.x
reward=self.stepr
done=False
if nextstate in self.disaster:
reward=self.cliffr
done=True
if nextstate in self.end:
done=True
return nextstate,reward,done
def reset(self):
self.x=self.initx
self.y=self.inity
return self.y*self.colnum+self.x3.Q-learning算法实现
python
class Qlearning():
""" Qlearning算法 """
def __init__(self,colnum,rownum,alpha,gamma,epsilon,actionnum=4):
self.colnum=colnum
self.rownum=rownum
self.alpha=alpha#学习率
self.gamma=gamma#折扣因子
self.epsilon=epsilon
self.actionnum=actionnum#动作个数
self.qtable=np.zeros([self.colnum*self.rownum,self.actionnum])
def takeaction(self,state):
if np.random.random()<self.epsilon:
action=np.random.randint(0,self.actionnum)
else:
action=np.argmax(self.qtable[state])
return action
def bestaction(self,state):
qmax=np.max(self.qtable[state])
a=np.where(self.qtable[state]==qmax)
return a
def update(self,s0,a0,r,s1):
tderror=r+self.gamma*np.max(self.qtable[s1])-self.qtable[s0][a0]
self.qtable[s0][a0]+=self.alpha*tderror4.打印目标策略函数
python
def printtheagent(agent,env,actionmeaning):
for i in range(env.rownum):
for j in range(env.colnum):
if (i*env.colnum+j) in env.disaster:
print('****',end=' ')
elif (i*env.colnum+j) in env.end:
print('EEEE',end=' ')
else:
a=agent.bestaction(i*env.colnum+j)
b=[0 for _ in range(len(actionmeaning))]
for m in range(len(actionmeaning)):
b[m]=1 if m in a else 0
pistr=''
for k in range(len(actionmeaning)):
pistr+=actionmeaning[k] if b[k]>0 else 'o'
print('%s'%pistr,end=' ')
print()5.相关参数设置
python
ncol=12#悬崖漫步环境中的网格环境列数
nrow=4#悬崖漫步环境中的网格环境行数
step_reward=-1#每步的即时奖励
cliff_reward=-100#悬崖的即时奖励
init_x=0#智能体在环境中初始位置的横坐标
init_y=nrow-1#智能体在环境中初始位置的纵坐标
alpha=0.1#价值估计更新的步长
epsilon=0.1#epsilon-贪婪算法的探索因子
gamma=0.9#折扣衰减因子
num_episodes=500#智能体在环境中运行的序列总数
tqdm_num=10#进度条的数量
printreturnnum=10#打印回报的数量
actionmeaning=['↑','↓','←','→']#上下左右表示符6.程序主体部分实现
python
np.random.seed(5)
returnlist=[]
env=cliffwalking(colnum=ncol,rownum=nrow,stepr=step_reward,cliffr=cliff_reward,initx=init_x,inity=init_y)
agent=Qlearning(colnum=ncol,rownum=nrow,alpha=alpha,gamma=gamma,epsilon=epsilon,actionnum=4)
for i in range(tqdm_num):
with tqdm(total=int(num_episodes/tqdm_num)) as pbar:
for episode in range(int(num_episodes/tqdm_num)):
episodereturn=0
state=env.reset()
done=False
while not done:
action=agent.takeaction(state)
nextstate,reward,done=env.step(action)
episodereturn+=reward
agent.update(state,action,reward,nextstate)
state=nextstate
returnlist.append(episodereturn)
if (episode+1)%printreturnnum==0:
pbar.set_postfix({'episode':'%d'%(num_episodes/tqdm_num*i+episode+1),'return':'%.3f'%(np.mean(returnlist[-printreturnnum:]))})
pbar.update(1)
episodelist=list(range(len(returnlist)))
plt.plot(episodelist,returnlist)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Qlearning on{}'.format('Cliff Walking'))
plt.show()
print('Qlearning算法最终收敛得到的策略为:')
printtheagent(agent=agent,env=env,actionmeaning=actionmeaning)7.结果展示
Iteration 0: 100%|████████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 428.50it/s, episode=50, return=-114.000Iteration 1: 100%|████████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 895.23it/s, episode=100, return=-72.500
Iteration 2: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 1222.78it/s, episode=150, return=-66.100
Iteration 3: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 1519.26it/s, episode=200, return=-40.000
Iteration 4: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 1533.70it/s, episode=250, return=-26.600
Iteration 5: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 1925.46it/s, episode=300, return=-38.000
Iteration 6: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 2387.50it/s, episode=350, return=-47.000
Iteration 7: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 2949.12it/s, episode=400, return=-25.500
Iteration 8: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 3133.12it/s, episode=450, return=-34.000
Iteration 9: 100%|███████████████████████████████████████████████████████████████████████████████████████████████| 50/50 00:00\<00:00, 3133.44it/s, episode=500, return=-60.400
Qlearning算法最终收敛得到的策略为:↑ooo o↓oo ooo→ o↓oo ooo→ ooo→ ooo→ ooo→ o↓oo ooo→ o↓oo o↓oo
o↓oo ooo→ ooo→ ooo→ ooo→ ooo→ o↓oo ooo→ o↓oo ooo→ ooo→ o↓oo
ooo→ ooo→ ooo→ ooo→ ooo→ ooo→ ooo→ ooo→ ooo→ ooo→ ooo→ o↓oo
↑ooo **** **** **** **** **** **** **** **** **** **** EEEE

8.总结
打印出的回报是行为策略在环境中交互得到的,而不是Q-learning算法在学习的目标策略的真实回报,目标策略打印出来如上所示,发现其更偏向于走在悬崖边上,这与Sarsa算法得到的比较保守的策略相比更优。
比较Sarsa算法与Q-learnig算法在训练中的回报曲线图,可以发现在一个序列中Sarsa算法获得期望回报高于Q-learning算法,原因是训练过程中智能体采取基于当前Q(s,a)函数的-贪婪策略来平衡探索与利用,Q-learning算法由于沿着悬崖边走,会以一定的概率探索"掉入悬崖"这一动作,而Sarsa相对保守的路线使得智能体几乎不可能掉入悬崖。