1.unordered系列关联式容器
本节主要介绍unordered_map和unordered_set两个容器,底层使用哈希实现的
unordered_map
1.unordered_map是储存<key,value>键值对的关联式容器,其允许通过key快速查找到对应的value,和map非常相似,但是底层实现完全不同
2.unoredered_map没有对<key,value>进行排序,而是映射一个对象,其内容与其键相关联,键和映射值的类型可能不同
2.底层结构
unordered系列的关联式容器之所以效率比较高,是因为底层实现了哈希结构
哈希概念
构造一种储存结构,通过某种函数使元素的储存位置与他的关键码建立一一映射的关系,那么在查找该元素的时候很快就能找到
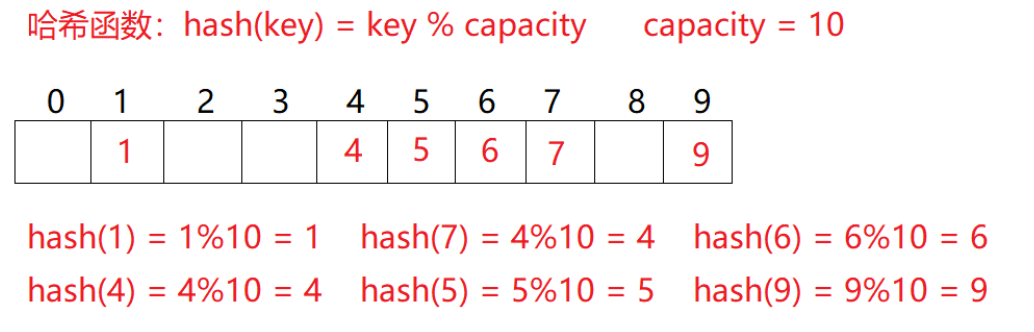
这个顺序表叫做哈希表,但是还有一个问题,如果插入44会出现什么问题?
哈希冲突
不同关键字通过相同的哈希函数计算出相同的哈希地址,这种现象称为哈希冲突
这种情况我们通常用开放定址法和哈希桶解决
常见哈希函数
常用的除留余数法
就是用我们插入的数据模上哈希表的长度,得出的余数,就是我们得到的插入位置的下标;
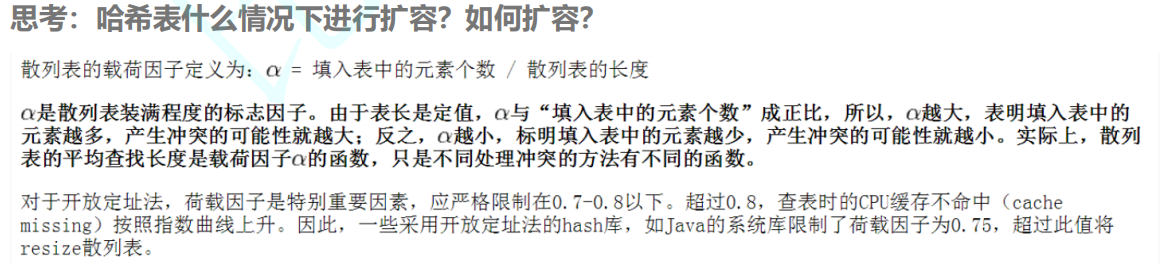
哈希表什么时候扩容
开放定址法实现哈希
#pragma once
#include<vector>
template<class K>
struct HashFunc
{
size_t operator()(const K& key)
{
return (size_t)key;
}
};
//特化
template<>
struct HashFunc<string>
{
size_t operator()(const string& key)
{
size_t hash = 0;
for (auto ch : key)
{
hash *= 131;
hash += ch;
}
return hash;
}
};
namespace open_address
{
enum State
{
EXIST,
EMPTY,
DELETE
};
template<class K, class V>
struct HashData
{
pair<K, V> _kv;
State _state = EMPTY;
};
template<class K, class V, class Hash = HashFunc<K>>
class HashTable
{
public:
HashTable()
{
_tables.resize(10);
}
bool Insert(const pair<K,V>& kv)
{
if (Find(kv.first))
{
return false;
}
//扩容
if (_n * 10 / _tables.size() >= 7)
{
HashTable<K, V> newHT;
newHT._tables.resize(_tables.size() * 2);
for (size_t i = 0; i < _tables.size(); i++)
{
if (_tables[i]._state == EXIST)
{
newHT.Insert(_tables[i]._kv);
}
}
_tables.swap(newHT._tables);
}
Hash hs;
size_t hashi = hs(kv.first) % _tables.size();
while (_tables[hashi]._state ==EXIST)
{
++hashi;
hashi %= _tables.size();
}
_tables[hashi]._kv = kv;
_tables[hashi]._state = EXIST;
++_n;
return true;
}
HashData<K, V>* Find(const K& key)
{
Hash hs;
size_t hashi = hs(key) % _tables.size();
while (_tables[hashi]._state != EMPTY)
{
if (_tables[hashi]._state == EXIST &&
_tables[hashi]._kv.first == key)
{
return &_tables[hashi];
}
++hashi;
hashi %= _tables.size();
}
return nullptr;
}
bool Erase(const K& key)
{
HashData<K, V>* ret = Find(key);
if (ret == nullptr)
{
return false;
}
else
{
ret->_state = DELETE;
--_n;
return true;
}
}
private:
vector<HashData<K, V>> _tables;
size_t _n = 0;
};