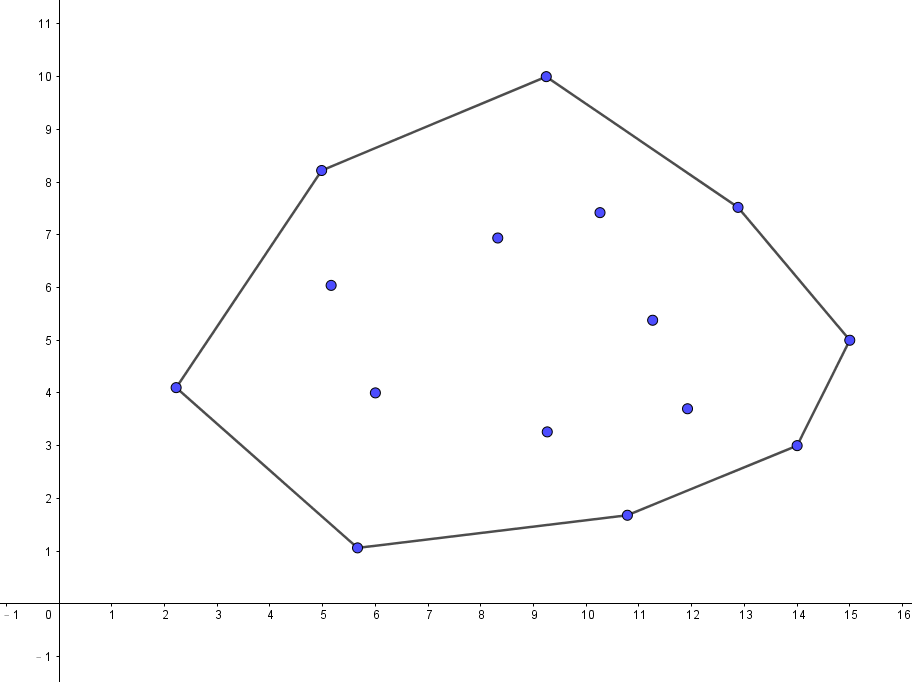
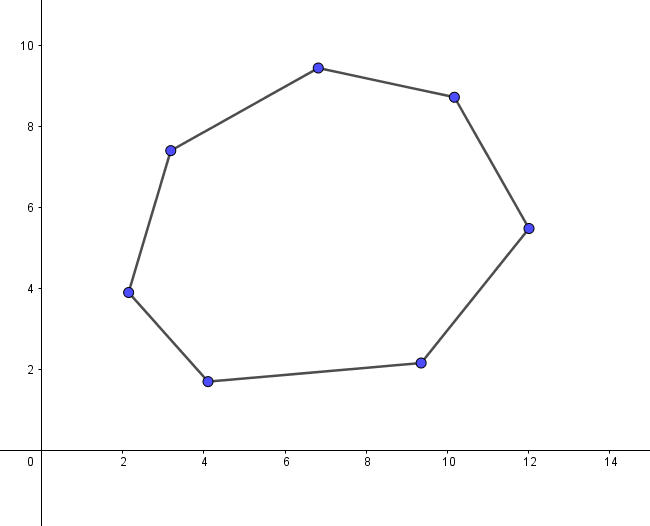
现在有一大堆点,然后你要找出一个可以围住这些点且面积最小的凸多边形,这个凸多边形称为凸包。
显而易见,如果要面积最小,那凸包的顶点势必得是这一大堆点的几个点,你也可以想成是用一条橡皮筋把这些点圈起来。
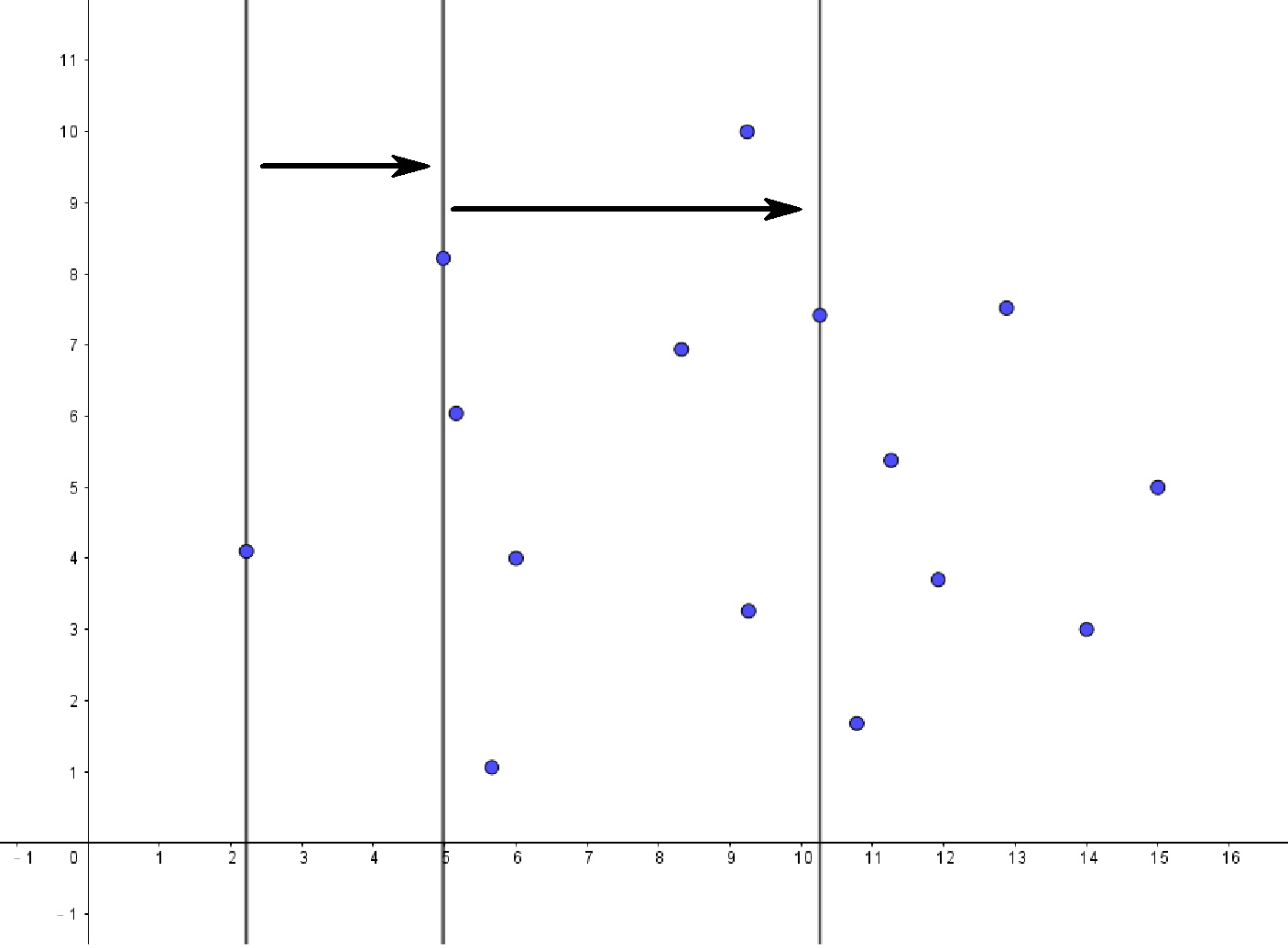
先把各个点按坐标从小到大排序,坐标相同则再按坐标从小到大排序,排序之后的点顺序会是由左至右、由下至上,这样一来我们就可以按这个顺序遍历这些点,这种往固定方向扫描的方式,称为扫描线。
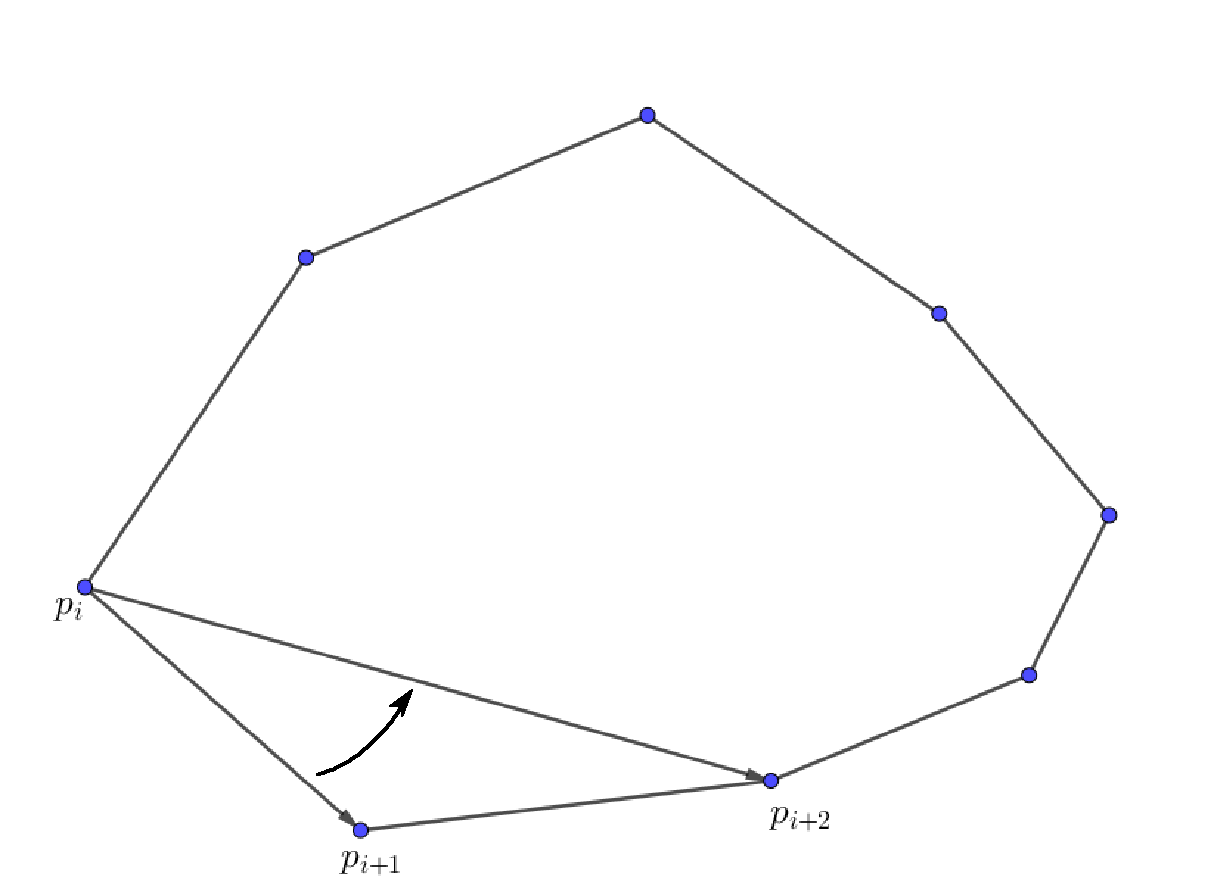
先讨论一件事情:有一个凸多边形,它的顶点已经按逆时针顺序排好了,依次是 p 1 , p 2 , . . . , p n p_1, p_2, ..., p_n p1,p2,...,pn ,那么 p i p_i pi 和 p j p_j pj 与 p k p_k pk 的关系会是什么(令 i < j < k i < j < k i<j<k既然是凸多边形,那么它的边应该是要一直往同个方向转弯的,而如果将边逆时针排序,这个边的斜率也应该是一直往逆时针方向转弯,显然点也会是这样,因此:
再来,我们把凸包分成上下两部分:上凸包和下凸包,以极左和极右点分割,如果极左点或极右点有两个(最多只会有两个),上面那个属于上凸包,下面那个属于下凸包,否则极左点必属于下凸包,极右点必属于上凸包。
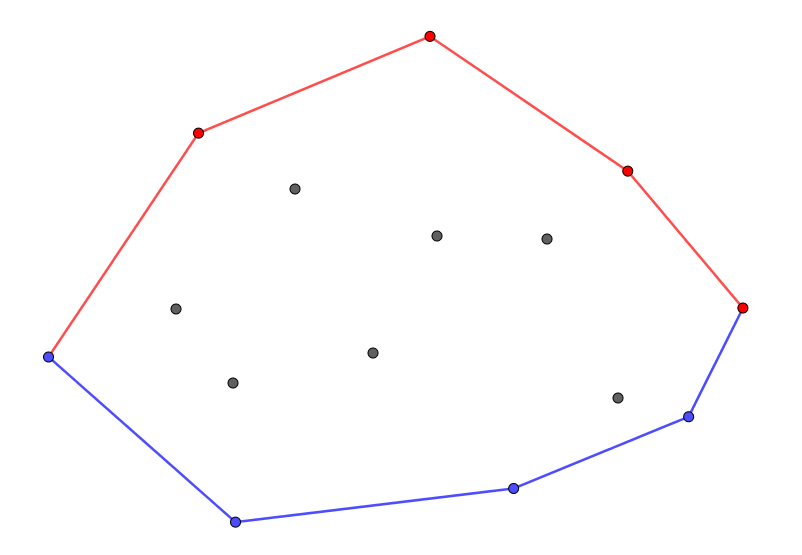
显然,上或下凸包中不会有 x 坐标相同的顶点,因此在上或下凸包中,每个顶点都能分别出左右的关系的,并且你会发现,如果把点按逆时针排序,在下凸包中的点也是由左而右排序的、在上凸包的点也是由右而左排序的。
这样一来左右关系就有用了,先用由左而右的扫描线把下凸包做出来,再用由右而左的扫描线把上凸包做出来,就可以得到整个凸包。
整个流程可以用一个栈来实现,在处理一个点的时候,我们尝试把它加进凸包里,此时这个点是 ( p ) ,栈顶的点是 ( top ) ,栈顶再往下一个点是 ( second ) ,把这些点代入刚刚的式子,符合条件或者栈大小小于 2 时就停止,否则就把栈顶 pop,然后继续重复,结束后就把目前处理中的点放入栈顶。
在做下凸包的时候,先从最左边且最下面的点开始做上述动作,做到最后,栈顶的点应该是最右边且最上面的点,把它 pop 掉,因为它应该属于上凸包;做上凸包的时候,从最右边且最上面的点开始做,最后栈顶会是最左且最下的点,把它 pop 掉后,这两个接起来就是完整的凸包。
因为要用到栈顶往下一个点,所以栈用 vector 来实现。
cpp
#include <bits/stdc++.h>
#define mp(a, b) make_pair(a, b)
#define pb(a) push_back(a)
#define F first
#define S second
using namespace std;
template<typename T>
pair<T, T> operator-(pair<T, T> a, pair<T, T> b){
return mp(a.F - b.F, a.S - b.S);
}
template<typename T>
T cross(pair<T, T> a, pair<T, T> b){
return a.F * b.S - a.S * b.F;
}
template<typename T>
vector<pair<T, T>> getConvexHull(vector<pair<T, T>>& pnts){
int n = pnts.size();
sort(pnts.begin(), pnts.end());
vector<pair<T, T>> hull;
for(int i = 0; i < 2; i++){
int t = hull.size();
for(auto& pnt : pnts){
while(hull.size() - t >= 2 && cross(hull.back() - hull[hull.size() - 2], pnt - hull[hull.size() - 2]) <= 0)
hull.pop_back();
hull.pb(pnt);
}
hull.pop_back();
reverse(pnts.begin(), pnts.end());
}
return hull;
}旋转卡尺
用旋转两条平行线、夹住一堆点,看在线上的点是哪些,就叫旋转卡尺。
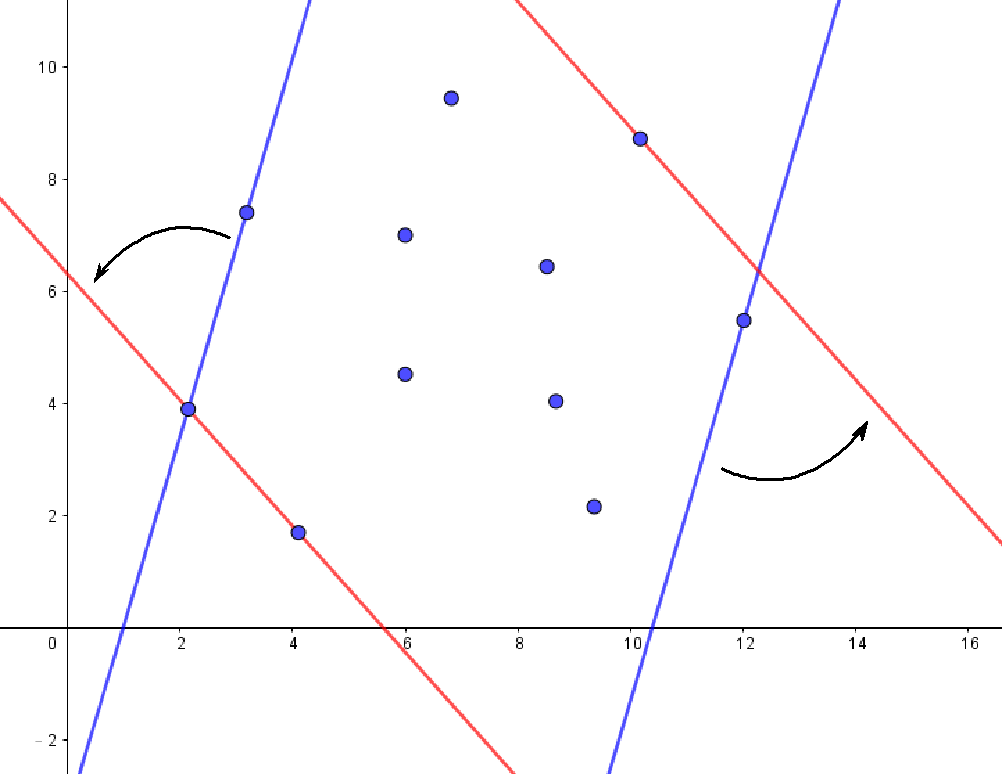
旋转线、夹点感觉很麻烦,是不是要用什么角度的东西啊?其实不用,先来分析一下问题,用两条平行线夹一堆点,那么平行线只会碰到凸包上的点而已,所以不在凸包上的点都可以先忽略:
过一个点的直线有很多条,但是过一个线段的直线只有一条,所以先枚举线段,再去找和它平行的直线应该会夹到哪个点,这样问题就简单多了。要找平行线会碰到哪个点,显然离线段最远的点就是了。
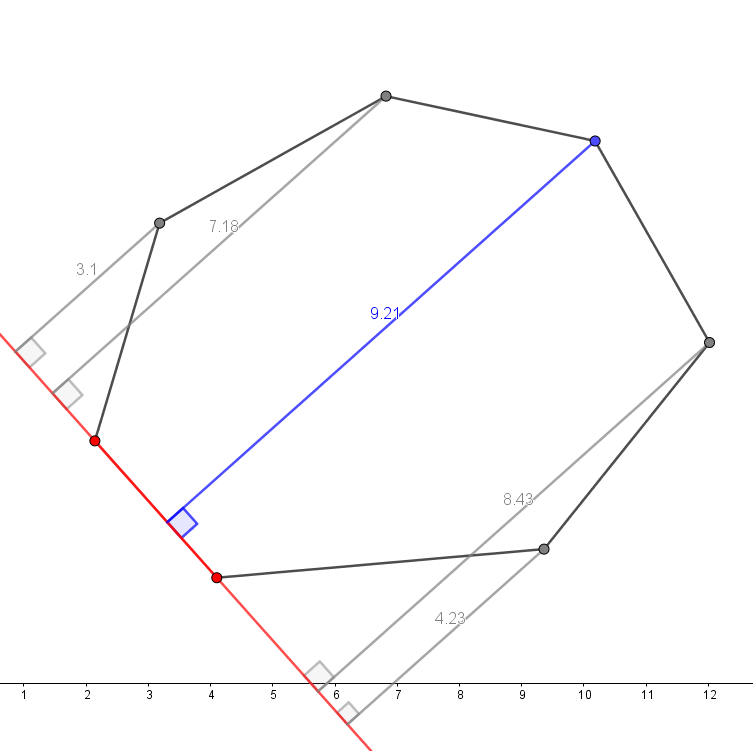
不过算距离是另一个问题,听起来也很麻烦,但其实很简单。一个点距离一条直线的距离,等同于过该点在直线上作垂线段的长,而一开始选定的线段作为底、垂线段长作为高,那么就可以得一个平行四边形面积了,且底的长是固定的,只要枚举最远点,就等同于枚举高,而得出面积最大的,就是我们要求的最远点。
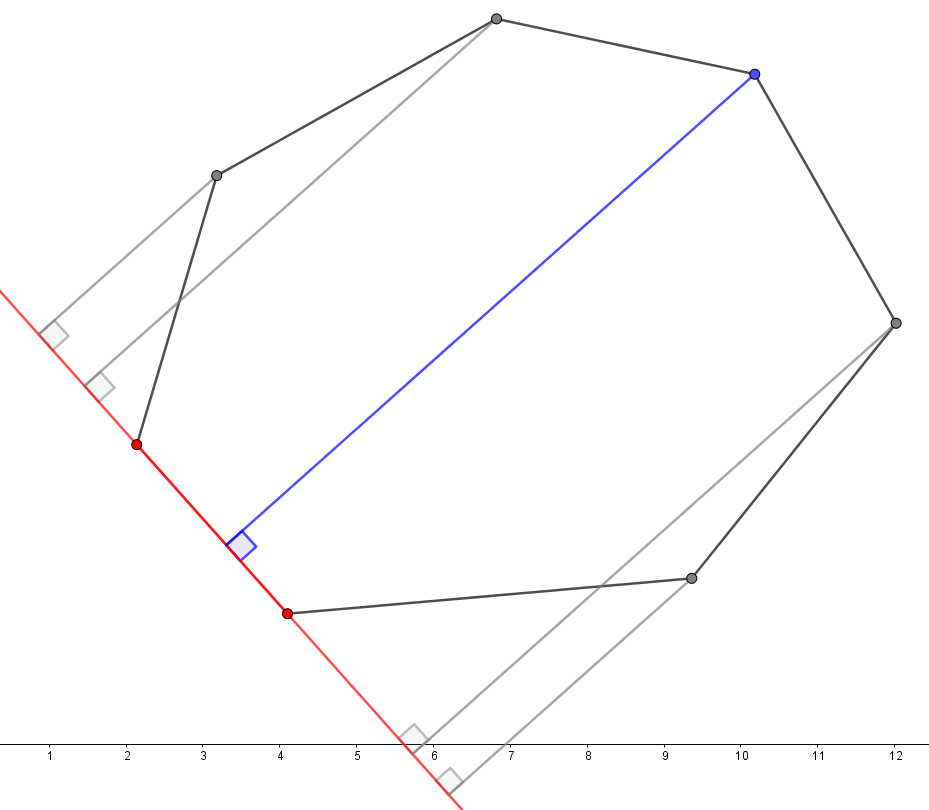
上图中,选定两个红色点所连成的线段为底,然后枚举各个顶点取高,得出蓝色垂线是最长的,因此蓝色点就是距离红色线段最远的点。
这就是旋转卡尺的基础应用------最远点对,找到距离每一线段最远的点,再取该点与线段两端点的距离取最大值,这样就可以得出所有点中最远的点对为何。
硬要这么做的方式,时间复杂度是 O ( n 3 ) O(n^3) O(n3), n n n 是凸包上点的数量(不计盖凸包的复杂度),枚举线段是 O ( n 2 ) O(n^2) O(n2) ,再枚举一个点要再乘上 n n n 。
这不够快,我们需要更有效率的方式。
仔细观察一下,点和线段的距离有一个规律------先渐大,到一个最大值,再渐小:
会发现它会呈现一个单峰函数,也就是一个先递增、再递减的函数,这样我们就可以三分搜找到最高点了,这样三分搜一次的复杂度是 O ( n ) O(n) O(n),再乘上点的数量,就是 O ( n 2 ) O(n^2) O(n2)。
这样子还是不够快,前面提到旋转卡尺是「旋转两条平行线」,刚才的动作都是旋转其中一条,再去搜寻另一条,那我们可不可以在旋转其中一条的同时,把另一条一起旋转?答案是:可以。
(以下的转都是指往同一个方向转)
先找到距离第一条边最远的点,过前者的线称为第一条平行线,过后者的称为第二条平行线,接下来我们转动第一条平行线,也就是把它转到第二条线段上,而第二条平行线不要动,会发现,第一条平行线离第二条平行线那个点近了一些,接着再转第二条平行线,也就是把它转到下一个点上,那么距离会变远。
也就是,可以在不重新来过的情況下,找到单峰函数的最高点,会发现这样就是把两条平行线绕一圈,因此这样的复杂度是 O ( n ) O(n) O(n) 。