三子棋机器人,一共分三个步骤:
1,图像识别,获得棋子数组。
2,下棋策略算法。
3,机械臂控制抓取和落子。
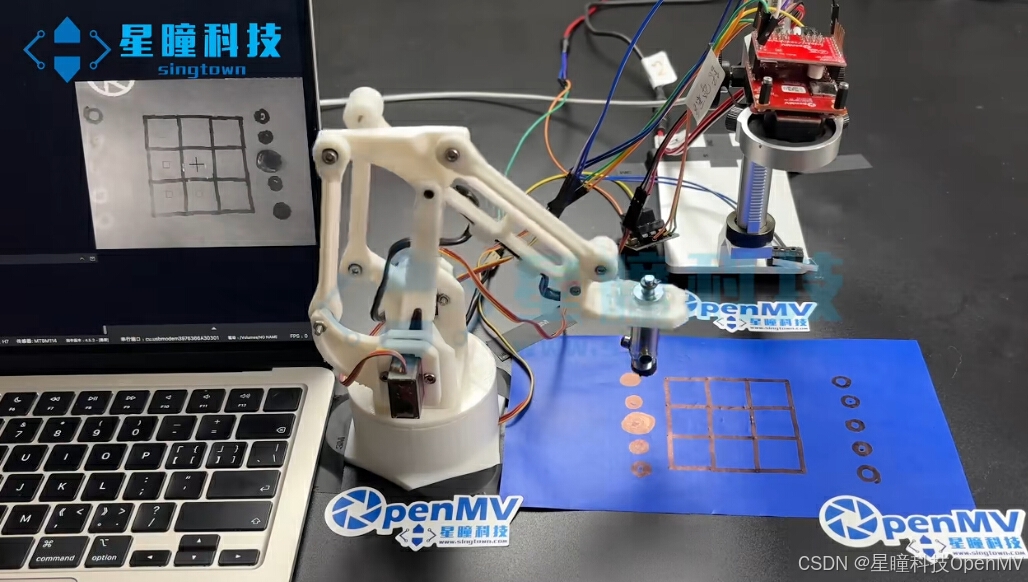
硬件上我们使用了星瞳科技的OpenMV4 H7,所有的代码都是在OpenMV上运行的!包括机械臂控制,继电器控制,下棋策略算法,图像识别算法。
机械臂是直接3D打印的,使用了3个舵机,可以直接通过OpenMV的舵机扩展板控制。
棋子拾取是电磁铁来实现的,因为我顺手薅了10个纽扣电池当棋子。OpenMV可以通过继电器控制电磁铁。
1,图像识别很简单,先获取灰度图,然后在9个棋盘区域内,获取颜色信息,在OpenMV中使用statics完成。通过灰度信息,可以得到是黑子,还是白子,还是空子。 2,计算下一步棋应该怎么走,我的好朋友CHATGPT老师告诉我用minimax算法,并且给我写好了这部分的代码。 3,机械臂控制也比较简单,在等候取子区,以及每个9宫格落子区,都获取机械臂的位置,通常可以通过示教功能来完成,因为我的机械臂只用了一天时间做的很赶,所以是通过代码直接看位置。
# robot.py
import time
from servo import Servos
from machine import SoftI2C, Pin
import math
# 控制继电器,继电器控制电磁铁
pin1 = Pin('P1', Pin.OUT_PP, Pin.PULL_NONE)
pin1.value(0)
# PCA9685 舵机扩展板
i2c = SoftI2C(sda=Pin('P5'), scl=Pin('P4'))
servo = Servos(i2c, address=0x40, freq=50, min_us=650, max_us=2800, degrees=180)
# 三个舵机的初始位置
servo.position(0, 0)
servo.position(1, 90)
servo.position(2, 90)
#全局变量,用于缓慢移动
servo_positions = [0,90,90]
# 控制一个舵机移动
def move(index, angle):
servo.position(index, angle)
servo_positions[index] = angle
# 控制三个舵机移动
def move_list(angle_list):
print(angle_list)
move(0, int(angle_list[0]))
move(1, int(angle_list[1]))
move(2, int(angle_list[2]))
# 控制三个舵机慢速移动
def slow_move_to(angle_list):
init_positions = servo_positions.copy()
d0 = angle_list[0] - init_positions[0]
d1 = angle_list[1] - init_positions[1]
d2 = angle_list[2] - init_positions[2]
dm = int(max(abs(d0), abs(d1), abs(d2)))
if dm == 0:
return
for i in range(dm+1):
move_list([init_positions[0]+i*d0/dm,
init_positions[1]+i*d1/dm,
init_positions[2]+i*d2/dm])
time.sleep_ms(40)
# 设置棋子拾取区的位置
PICK = [[74,128,19], [82,128,17], [90,125,14], [98,128,17], [106,128,19]]
# 拾取区机械臂提起来的位置
HIGH_PICK = [90,95,55]
# 棋盘的放置位置
BOARD = [
[[82,150,55], [82,140,40], [81,133,30]],
[[90,150,55], [90,140,40], [90,133,30]],
[[98,150,55], [98,140,40], [99,133,30]]
]
# 棋盘落子上方的位置
HIGH_BOARD = [90,120,70]
# 拾取棋子,并放置到 x,y
def pick_and_place(x,y):
slow_move_to(HIGH_PICK)
time.sleep_ms(500)
slow_move_to(PICK[2])
time.sleep_ms(500)
slow_move_to(HIGH_PICK)
time.sleep_ms(500)
slow_move_to(HIGH_BOARD)
time.sleep_ms(500)
slow_move_to(BOARD[y][x])
time.sleep_ms(500)
pin1.value(1) # 继电器打开
time.sleep_ms(500)
slow_move_to(HIGH_PICK)
pin1.value(0) # 继电器关闭
time.sleep_ms(500)
slow_move_to([0,90,90])
if __name__ == "__main__":
# 校准测试用
time.sleep_ms(1)
for order in [
BOARD[1][1], BOARD[0][0], BOARD[1][0],
BOARD[2][0], BOARD[2][1], BOARD[2][2],
BOARD[1][2], BOARD[0][2], BOARD[0][1],
]:
slow_move_to(HIGH_BOARD)
time.sleep_ms(500)
slow_move_to(order)
time.sleep_ms(500)
#slow_move_to(BOARD[0][2])
#for x in PICK:
#slow_move_to(HIGH_PICK)
#time.sleep_ms(500)
#slow_move_to(x)
#time.sleep_ms(500)
slow_move_to([0,90,90])
# chess.py
SIZE = 3
# 检查赢了吗
def check_win(board, player):
# Check rows and columns
for i in range(SIZE):
if all(board[i][j] == player for j in range(SIZE)) or \
all(board[j][i] == player for j in range(SIZE)):
return True
# Check diagonals
if all(board[i][i] == player for i in range(SIZE)) or \
all(board[i][SIZE - 1 - i] == player for i in range(SIZE)):
return True
return False
# 检查平局了吗
def check_draw(board):
return all(board[i][j] != ' ' for i in range(SIZE) for j in range(SIZE))
# 计算策略得分
def minimax(board, depth, is_maximizing):
computer = 'X'
player = 'O'
if check_win(board, computer):
return 10 - depth
if check_win(board, player):
return depth - 10
if check_draw(board):
return 0
if is_maximizing:
best_score = float('-inf')
for i in range(SIZE):
for j in range(SIZE):
if board[i][j] == ' ':
board[i][j] = computer
score = minimax(board, depth + 1, False)
board[i][j] = ' '
best_score = max(score, best_score)
return best_score
else:
best_score = float('inf')
for i in range(SIZE):
for j in range(SIZE):
if board[i][j] == ' ':
board[i][j] = player
score = minimax(board, depth + 1, True)
board[i][j] = ' '
best_score = min(score, best_score)
return best_score
# 计算下一步位置
def computer_move(board):
if board == [
[" "," "," "],
[" "," "," "],
[" "," "," "]
]:
return 1,1
best_score = float('-inf')
move = (-1, -1)
for i in range(SIZE):
for j in range(SIZE):
if board[i][j] == ' ':
board[i][j] = 'X'
score = minimax(board, 0, False)
board[i][j] = ' '
if score > best_score:
best_score = score
move = (i, j)
if move != (-1, -1):
# board[move[0]][move[1]] = 'X'
print(f"Computer places X at ({move[0]}, {move[1]})")
return move[0], move[1]
# 检查该谁走了
def check_turn(board):
x_count = sum(row.count("X") for row in board)
o_count = sum(row.count("O") for row in board)
return "X" if x_count == o_count else "O"
# main.py
import sensor, image, time
from pyb import Pin
import robot
import chess
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
clock = time.clock()
# 轻触开关
pin0 = Pin('P0', Pin.IN, Pin.PULL_UP)
distance = 43
block = 10
# 生成九宫格的区域位置
def generate_centered_rois(width, height, b, k):
rois = []
# 计算每个ROI中心的位置偏移
offset = (b - k) // 2
# 计算整个3x3矩阵的宽度和高度
total_width = 3 * b
total_height = 3 * b
# 计算左上角的起始点,使矩阵居中
start_x = (width - total_width) // 2
start_y = (height - total_height) // 2
for i in range(3):
row = []
for j in range(3):
x_center = start_x + j * b + b // 2
y_center = start_y + i * b + b // 2
x = x_center - k // 2
y = y_center - k // 2
row.append((x, y, k, k))
rois.append(row)
return rois
# 九宫格的区域位置
rois = generate_centered_rois(sensor.width(), sensor.height(), distance, block)
# 棋盘数组
# 黑子:X
# 白子:O
# 没有棋子:空字符串
board = [
[" "," "," "],
[" "," "," "],
[" "," "," "],
]
#等开关按下并松开
def wait_key():
while pin0.value():
img = sensor.snapshot().lens_corr(1.8)
for y in range(len(rois)):
for x in range(len(rois[y])):
img.draw_rectangle(rois[y][x])
while not pin0.value():
time.sleep_ms(1)
while(True):
clock.tick()
wait_key()
img = sensor.snapshot().lens_corr(1.8)
# 图像识别得到棋盘数组
for y in range(len(rois)):
for x in range(len(rois[y])):
gray = img.get_statistics(roi=rois[y][x]).mean()
if gray < 100:
board[y][x] = "X"
elif gray > 200:
board[y][x] = "O"
else:
board[y][x] = " "
# 打印当前棋盘数组
for line in board:
print(line)
print()
# 画棋盘数组
for y in range(len(rois)):
for x in range(len(rois[y])):
if board[y][x] == "X":
color = 255
elif board[y][x] == "O":
color = 0
elif board[y][x] == " ":
color = 127
img.draw_rectangle(rois[y][x], color=color)
# 下棋策略
if chess.check_win(board, 'O'):
print("你赢啦!")
elif chess.check_win(board, 'X'):
print("我赢啦!")
elif chess.check_draw(board):
print("平局啦!")
elif chess.check_turn(board) == "X":
# 计算下一步棋子放在哪里
line,row = chess.computer_move(board)
# 目标棋盘上画十字
img.draw_cross(int(rois[line][row][0]+block/2), int(rois[line][row][1]+block/2), size=block, color=0)
sensor.flush()
# 机器人拾取并放置棋子
robot.pick_and_place(row, line)
sensor.flush()
elif chess.check_turn(board) == "O":
print("该你下了!")星瞳科技OpenMV视频教程-三子棋