VisionMaster基本操作
VM示例方案
1. 工具拖拽及使用方式
分别从采集和定位栏里拖拽图像源,快速匹配,Blob分析工具
2. 模块连线
依次连线
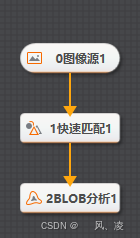
3.如何订阅
点击快速匹配,可以看到输入源已订阅了图像1的图像,Blob分析类似

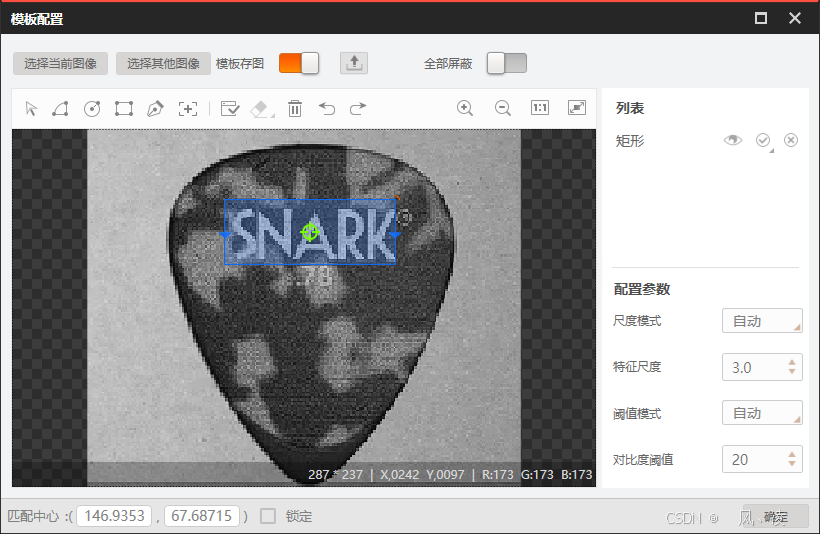
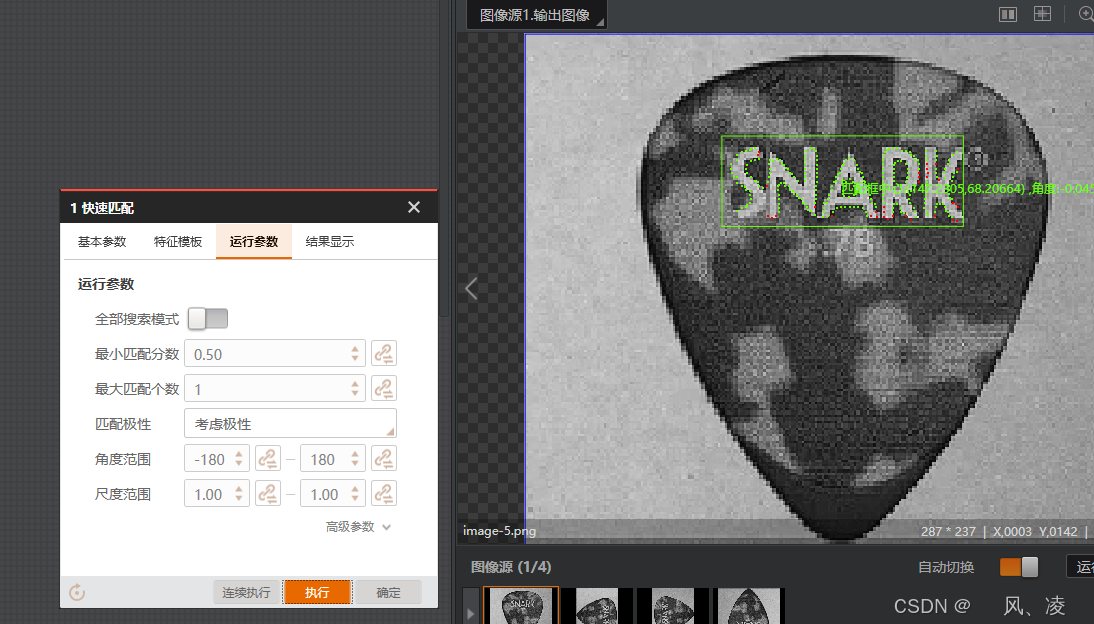
4. 方案操作及全局触发
- 点击快速匹配,创建特征模版,框选文字,运行参数角度范围设为-180到180

- 执行
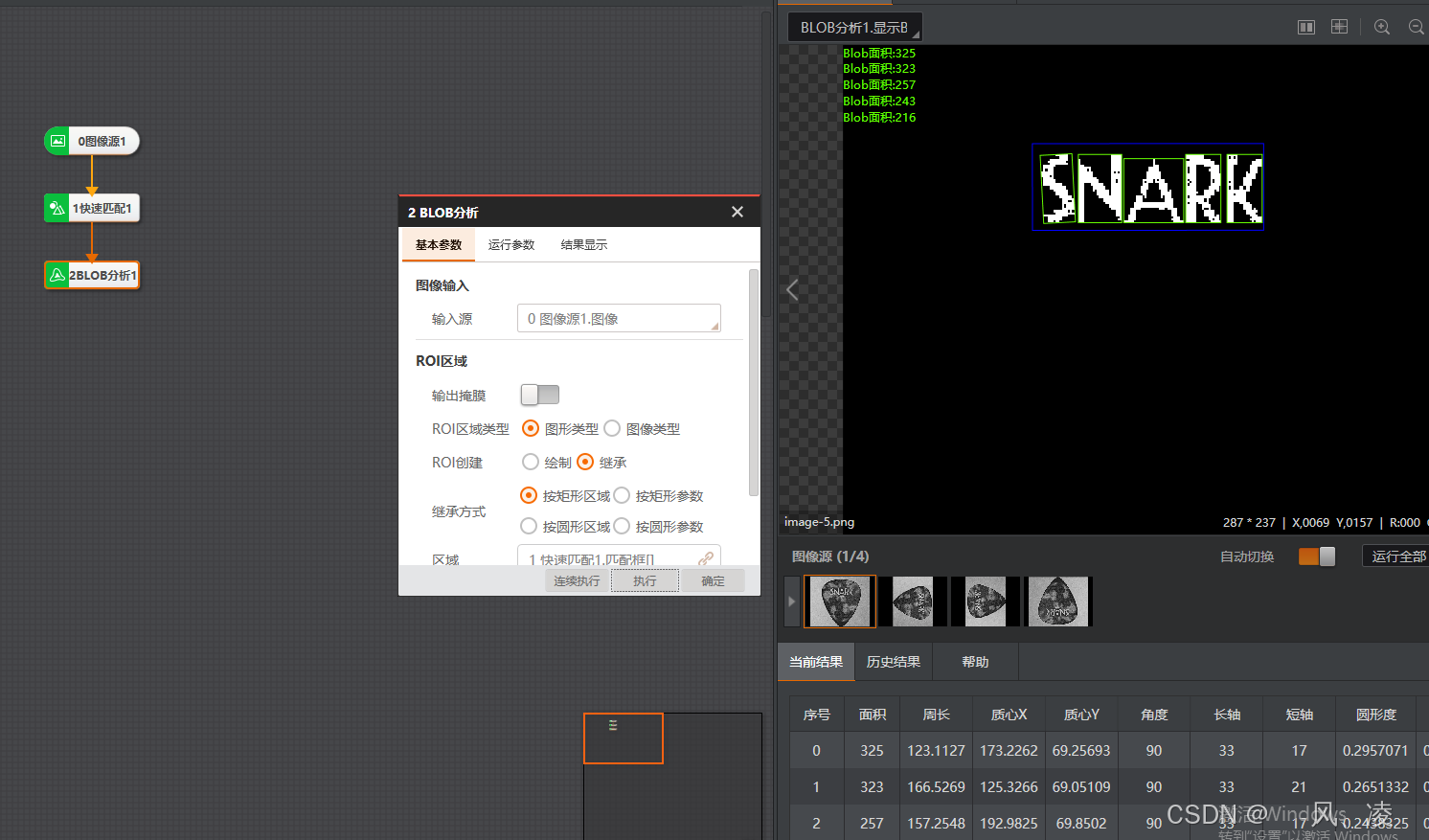
- Blob分析基本参数ROI创建选择继承,按矩形区域,区域链接选择快速匹配的匹配框,运行参数设置极性设置为亮于背景,低阈值设置为150.这样就可以将ROI区域内灰度值大于150的字符给定位到.

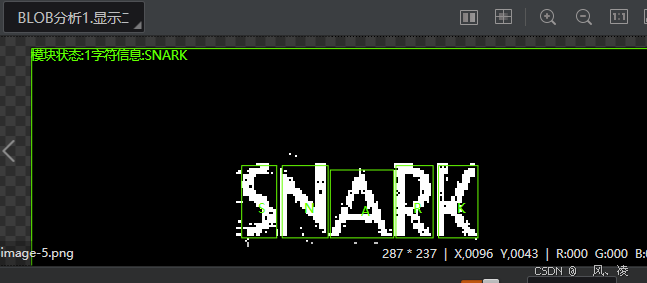
- 点击执行,可以看到每个字符都被定位到.
- 添加字符识别模块
运行参数启用字符过滤,识别字符数为5,点击5次大写字母

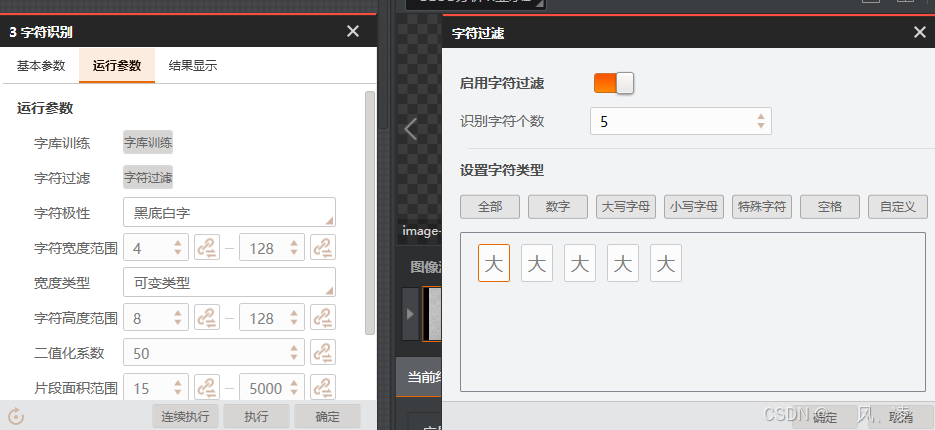
- 执行工具
- 添加格式化模块

订阅字符信息

- 添加发送数据模块

- 添加TCP服务器
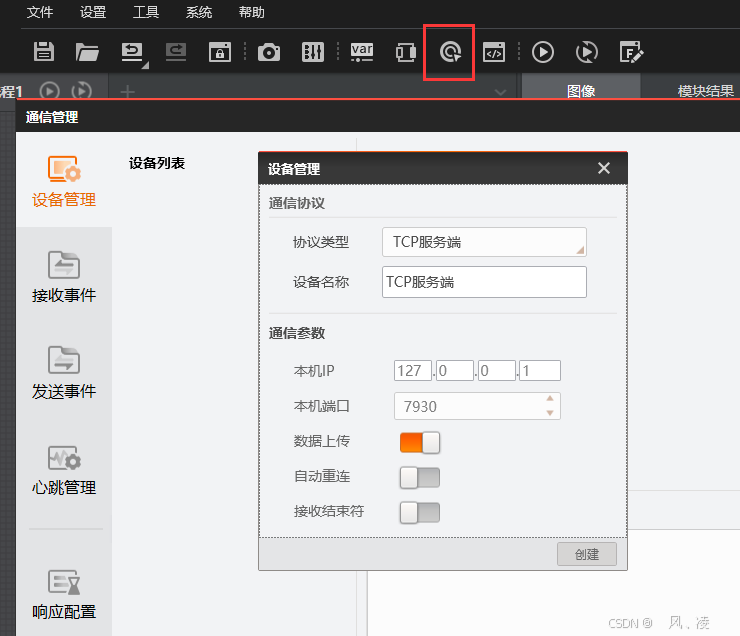
将设备开启
- 设置全局触发
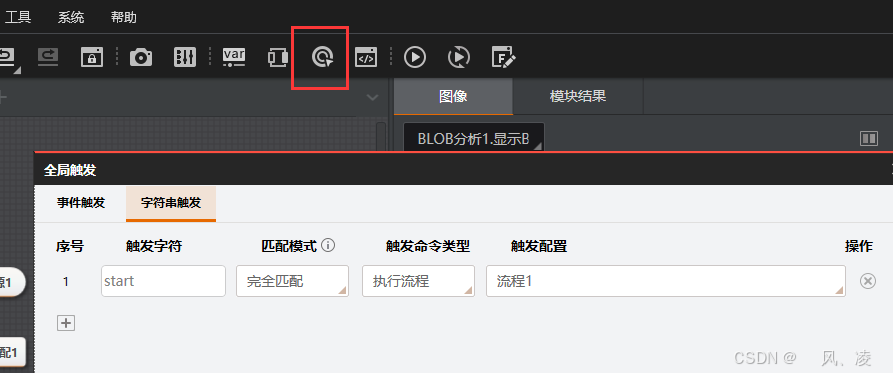
设置触发为start
- 打开发送数据工具,配置参数
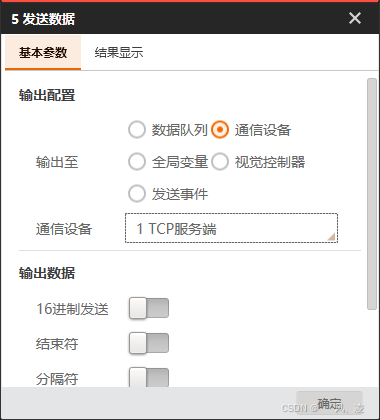
选择通信设置,TCP服务端
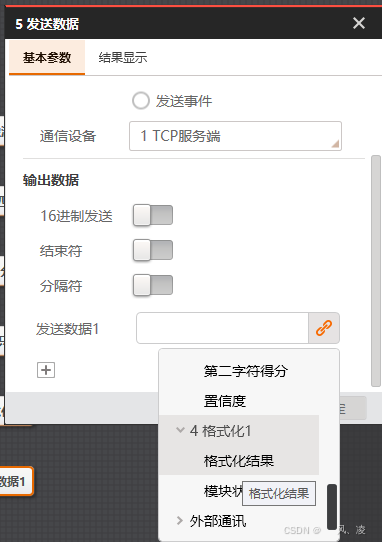
发送数据选择格式化的格式化信息

- 配置网络调试助手
选择TCP客户端,填入在VM中设置好的服务器地址和端口,连接
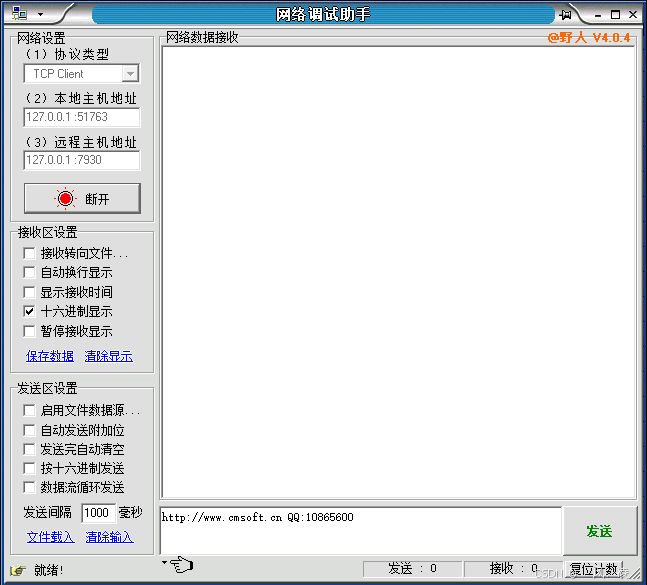
在发送窗口输入start,点击发送
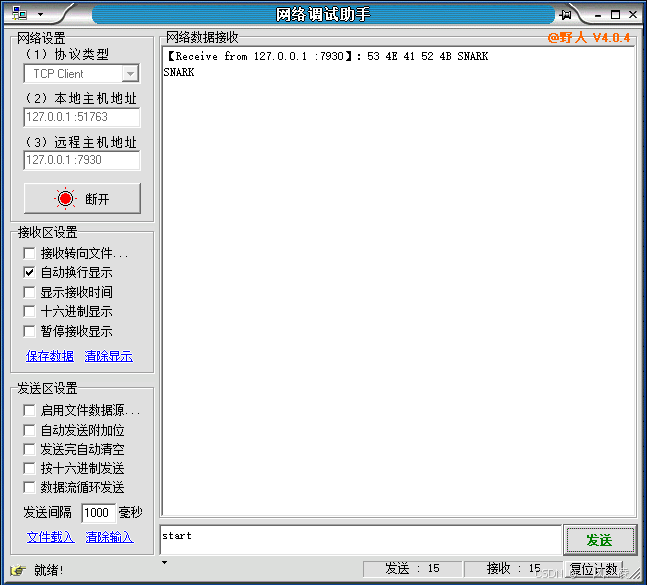
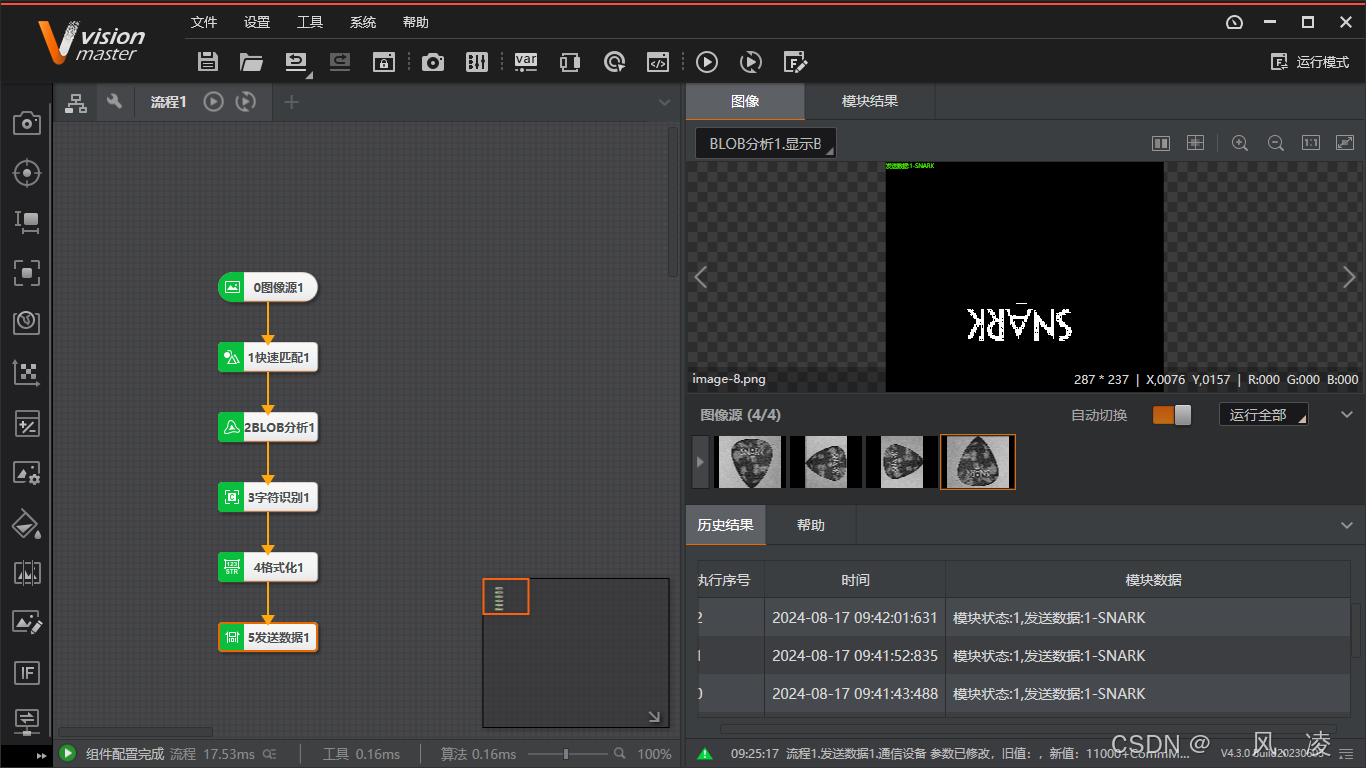
可以看到整个流程都被执行一遍,字符识别后也发送到了客户端.
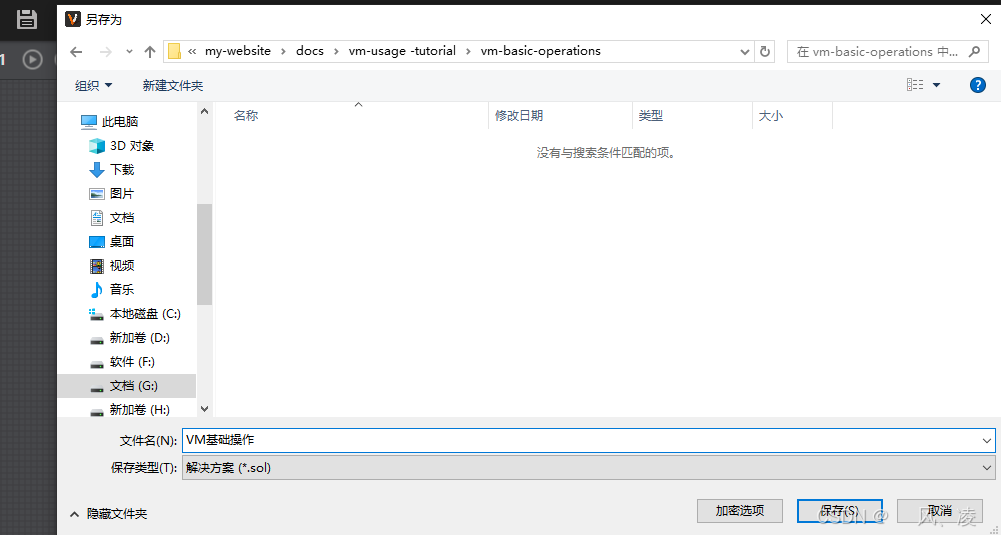
5.方案保存及加载
点击保存图标,将方案另存到本地
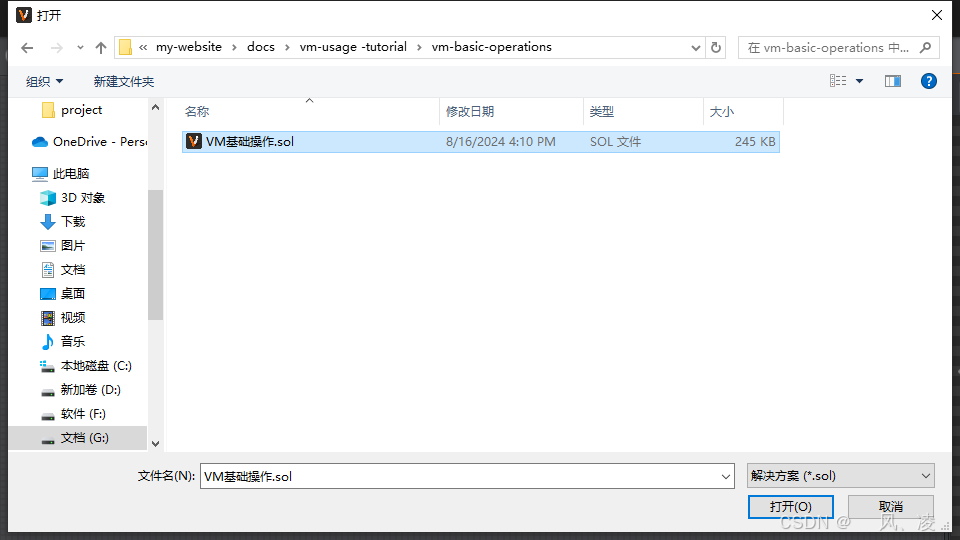
点击菜单栏文件选项,打开方案,加载方案到VM中.
6.相机触发
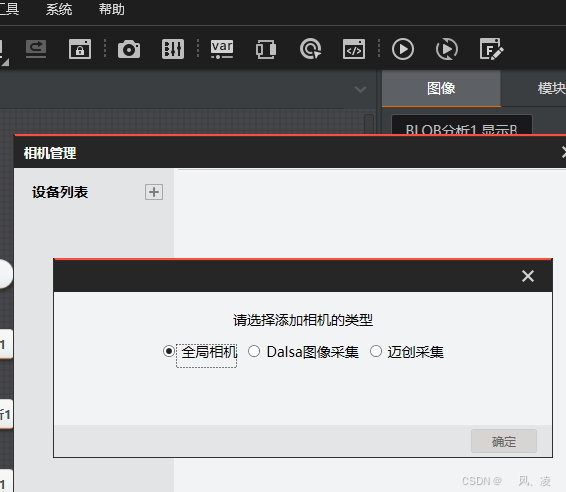
- 添加相机设备
在菜单栏打开相机管理,选择全局相机
- 选择需要连接的相机
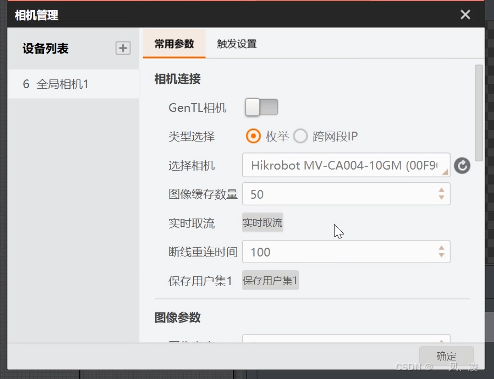
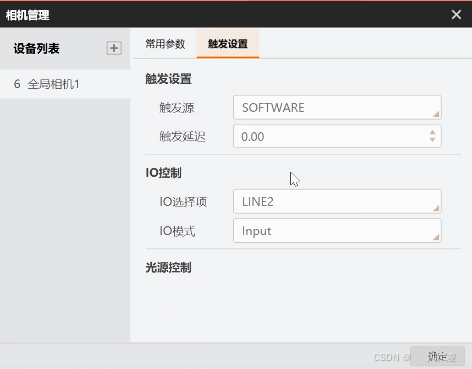
- 设置触发源为软触发
- 更改图像源
在图像源模块中设置图像源为相机
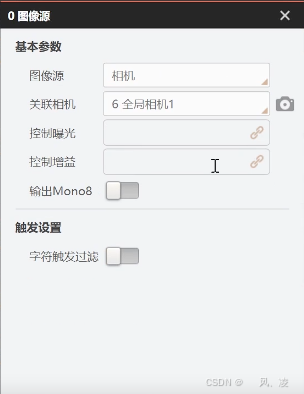
设置关联相机为刚设置好的全局相机
- VM中的图像由刚刚的标签变为了相机实际拍摄的图像
