在智能电网巡检中,无人机已成为标配。然而,一个致命问题始终困扰着行业:返航途中的撞线事故。纤细的电力线在传统视觉系统中如同"隐形"。本文解读一种受生物启发的创新方案------尺度不变逼近检测器(SILD)。该模型模拟蝗虫的"逃逸神经元",在计算资源有限的小型无人机上,实现了对电力线及多尺度障碍物的实时、精准检测,为无人机避障开辟了新的仿生路径。

论文链接:https://pmc.ncbi.nlm.nih.gov/articles/PMC11852856/pdf/biomimetics-10-00099.pdf
背景:当无人机遭遇"隐形杀手"
随着智能电网的发展,无人机凭借低成本和高效率,成为电力巡检的核心工具。但现实应用中存在一个严重短板:动态避障能力不足。特别是在应急返航或自定义航线任务中,无人机极易撞上电力线。电网企业的报告频繁指出,电力线因纤细、纹理缺失、背景复杂,导致传统传感器难以捕捉。
- 激光雷达:精度高,但能耗大、重量沉,不适合小型无人机。
- 传统视觉:依赖纹理特征,对光滑的电力线极易漏检。
- 深度学习:检测静态图像中的电力线效果不错,但在高速运动中实时判断碰撞风险仍面临延迟高、算力需求大的挑战。
我们需要一种全新的机制:不仅要"看见"线,更要像飞鸟一样本能地"感知"到危险正在逼近。
灵感源于自然:蝗虫的"巨运动检测器"****
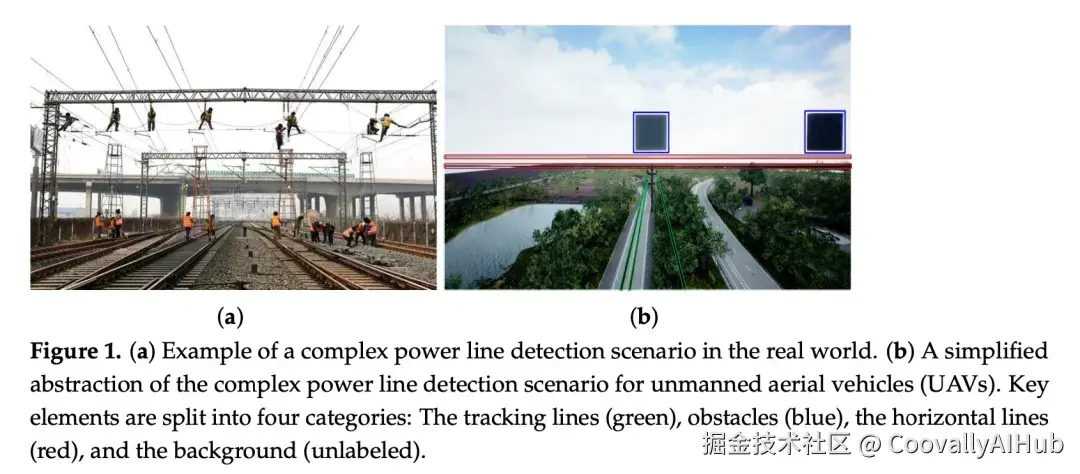
随着智能电网的发展,无人机凭借低成本和高效率,成为电力巡检的核心工具。但现实应用中存在一个严重短板:动态避障能力不足。特别是在应急返航或自定义航线任务中,无人机极易撞上电力线。电网企业的报告频繁指出,电力线因纤细、纹理缺失、背景复杂,导致传统传感器难以捕捉。在自然界中,蝗虫拥有一种独特的神经元------视叶巨运动检测器。它能在复杂的视觉背景中,迅速识别出正在逼近自己的天敌。其核心原理是:逼近目标的轮廓在视野中会产生 "连续、聚集"的运动,而背景(如草木)的运动则是"稀疏、非相干"的。
受此启发,研究团队提出了尺度不变逼近检测器。它并非简单地识别物体形状,而是通过分析视频流中的运动轮廓来判断威胁:
- 运动检测:通过帧间差分提取运动信息。
- 注意力增强:模拟生物唤醒机制,增强威胁区域,抑制背景噪声。
- 尺度不变性:确保无论是对远处的细小电线,还是近处的大型杆塔,都能保持一致的威胁敏感度。
技术深潜:SILD模型的三大核心模块****
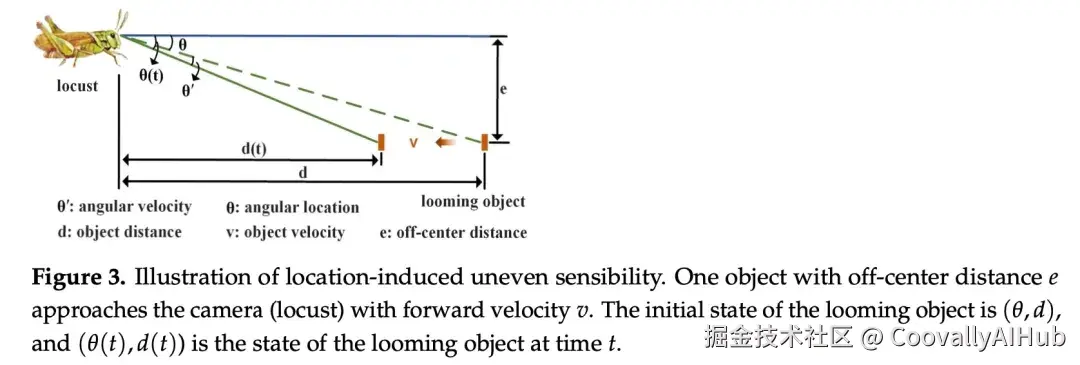
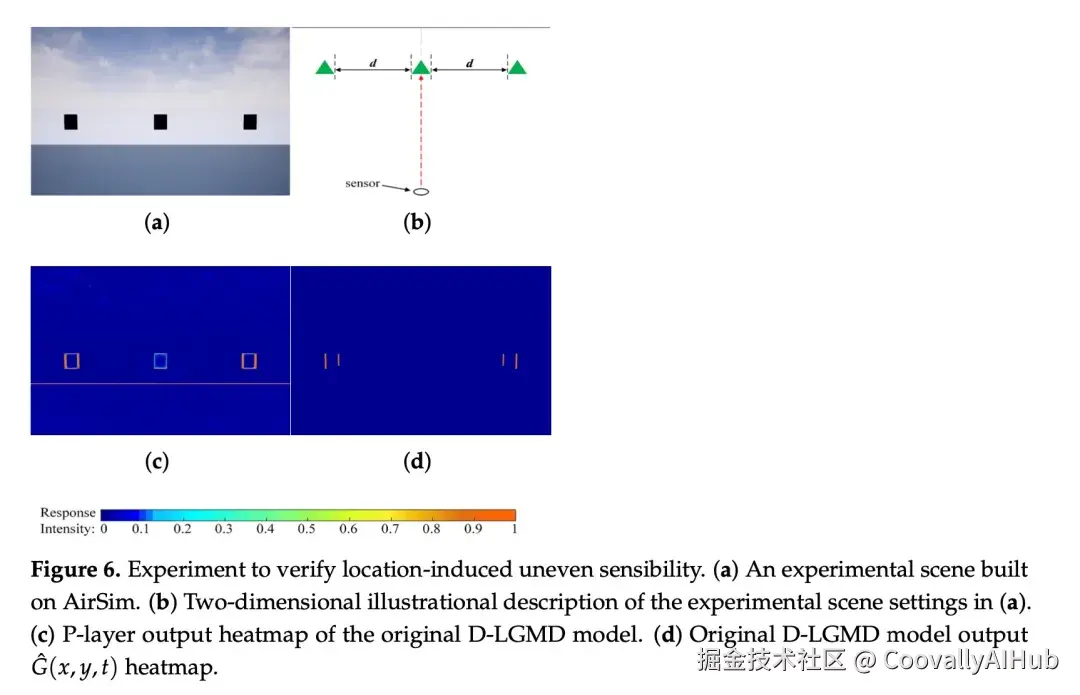
SILD的架构巧妙地结合了仿生学原理与轻量化计算,专为嵌入式平台(如NVIDIA Orin NX)设计。1. 位置校正模块:破解"偏心干扰"研究发现,无人机飞行时,位于视野边缘的物体会因为光学特性产生"速度不均"的错觉。这会导致模型误将擦身而过的物体识别为威胁。解决方案:引入基于高斯模型的校正函数。在图像预处理阶段修正因位置引起的灵敏度偏差,确保位于视野中央(碰撞轨迹)和边缘(安全通过)的物体能被正确区分。
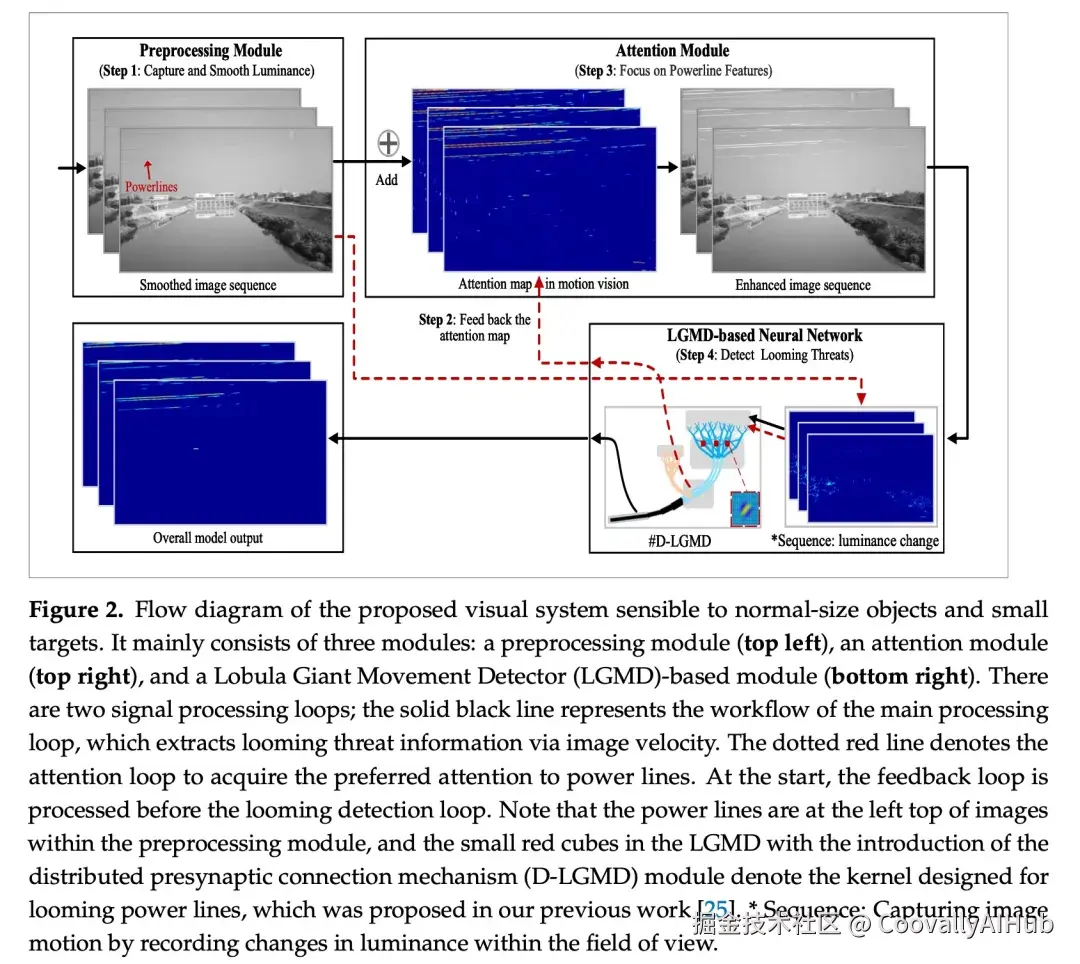
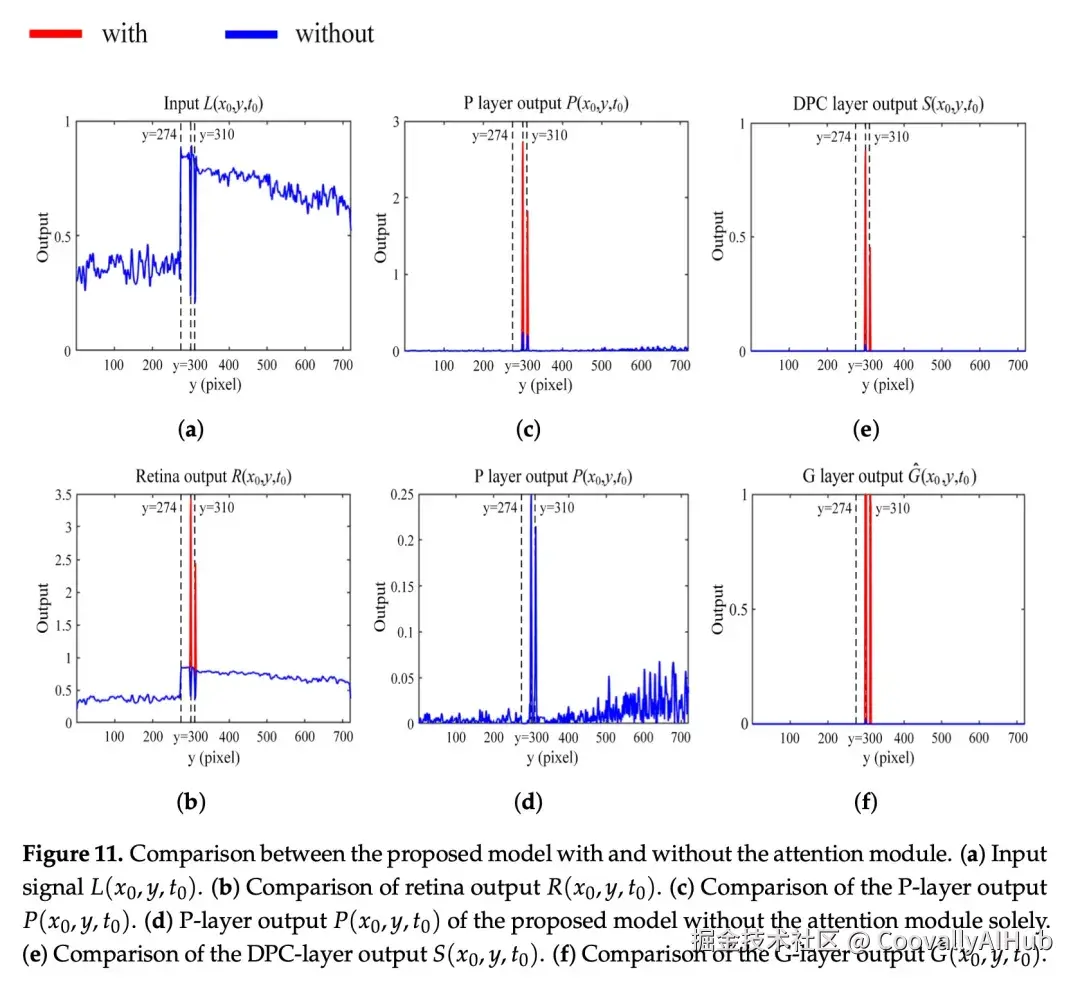
2. 加法注意力模块:让"隐形电线"显形这是SILD区别于传统LGMD模型的关键。痛点:传统D-LGMD对常规尺寸物体(如石块、树木)敏感,但对电线这种线状微小目标无能为力。
创新:通过专用的线特征核生成注意力图,并采用加法形式将其反馈到原始图像中。效果:注意力模块显著增强了电线所在区域的信号强度,同时抑制了无威胁边缘(如白色方块边缘)的干扰。这使得模型既能看见电线,也能看见常规障碍物,实现了真正的 "尺度不变"。
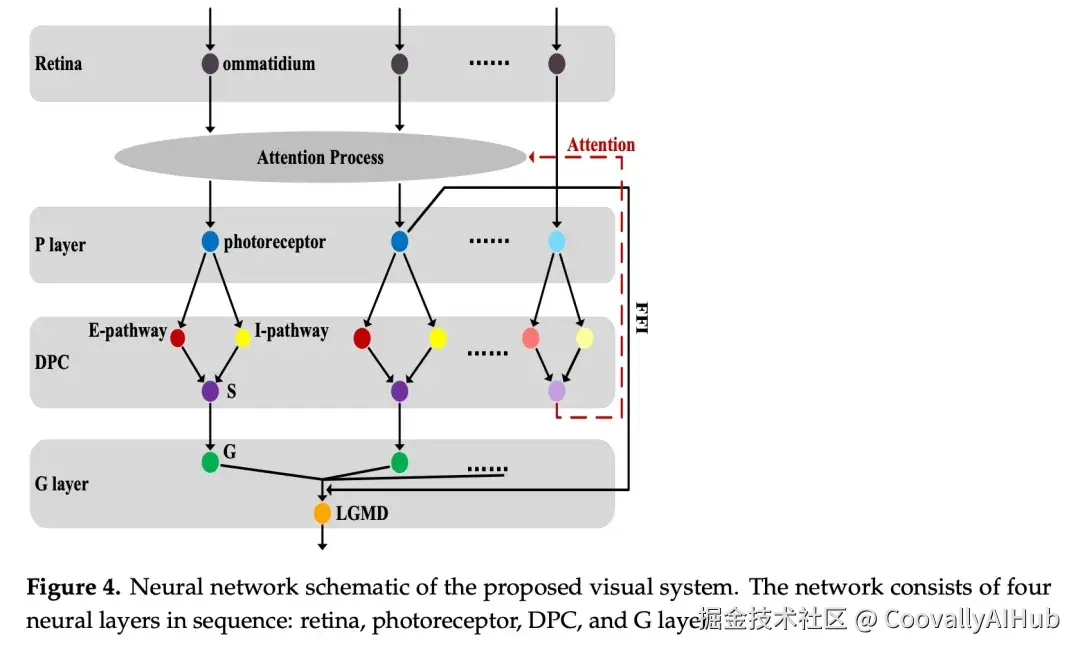
3. 仿生神经处理层经过增强的图像被送入基于LGMD的神经网络:感光器层:捕获亮度变化,提取运动信息。分布式突触前层:通过兴奋与抑制通路的相互作用,过滤掉低速度和背景噪声。分组层:整合信号,计算膜电位。只有当刺激达到一定阈值(代表物体正在逼近)时,才会触发报警。
性能对决:SILD VS 深度学习与传统算法
研究发现,无人机飞行时,位于视野边缘的物体会因为光学特性产生"速度不均"的错觉。这会导致模型误将擦身而过的物体识别为威胁。 解决方案:引入基于高斯模型的校正函数。在图像预处理阶段修正因位置引起的灵敏度偏差,确保位于视野中央(碰撞轨迹)和边缘(安全通过)的物体能被正确区分。
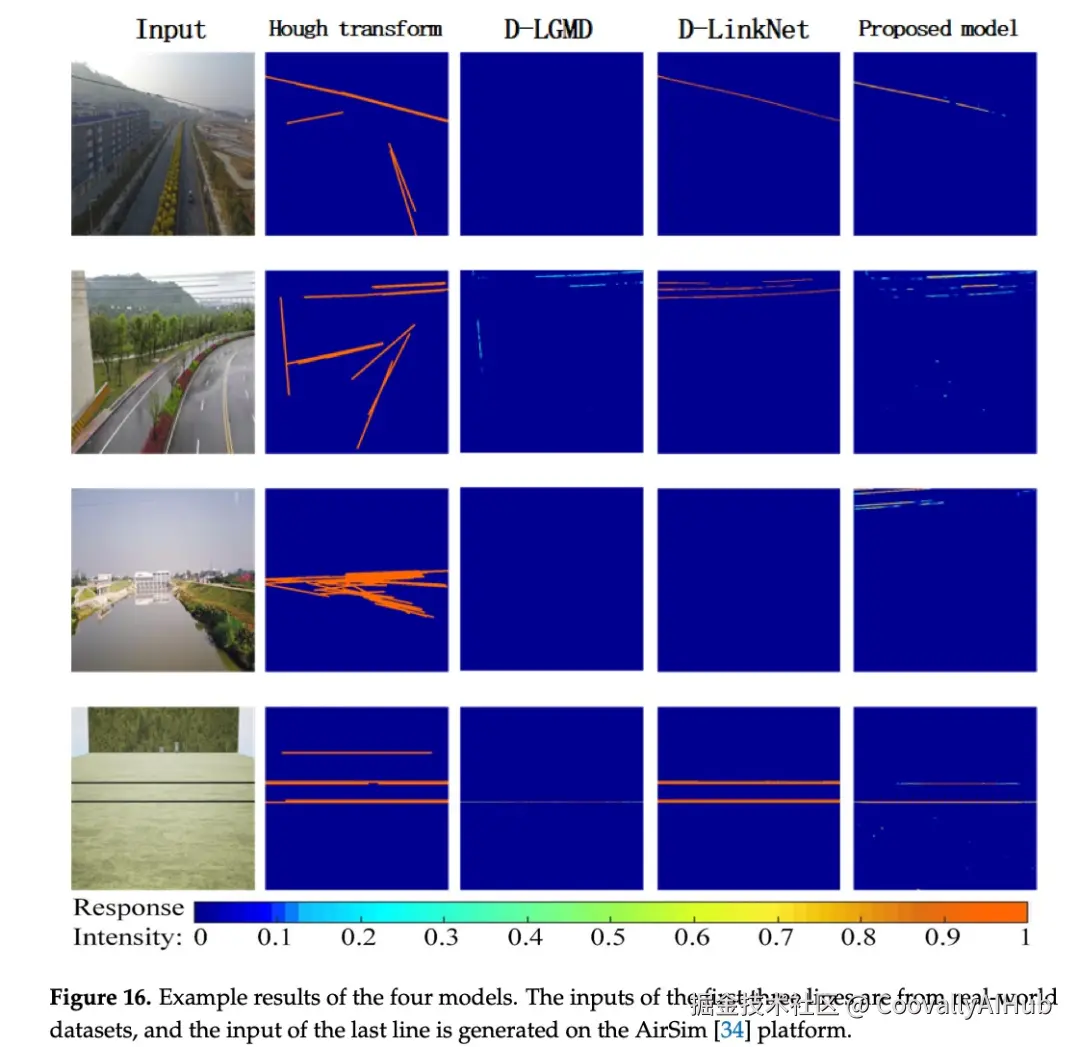
为了验证有效性,研究团队在真实场景与合成数据集上,将SILD与主流方法进行了对比。
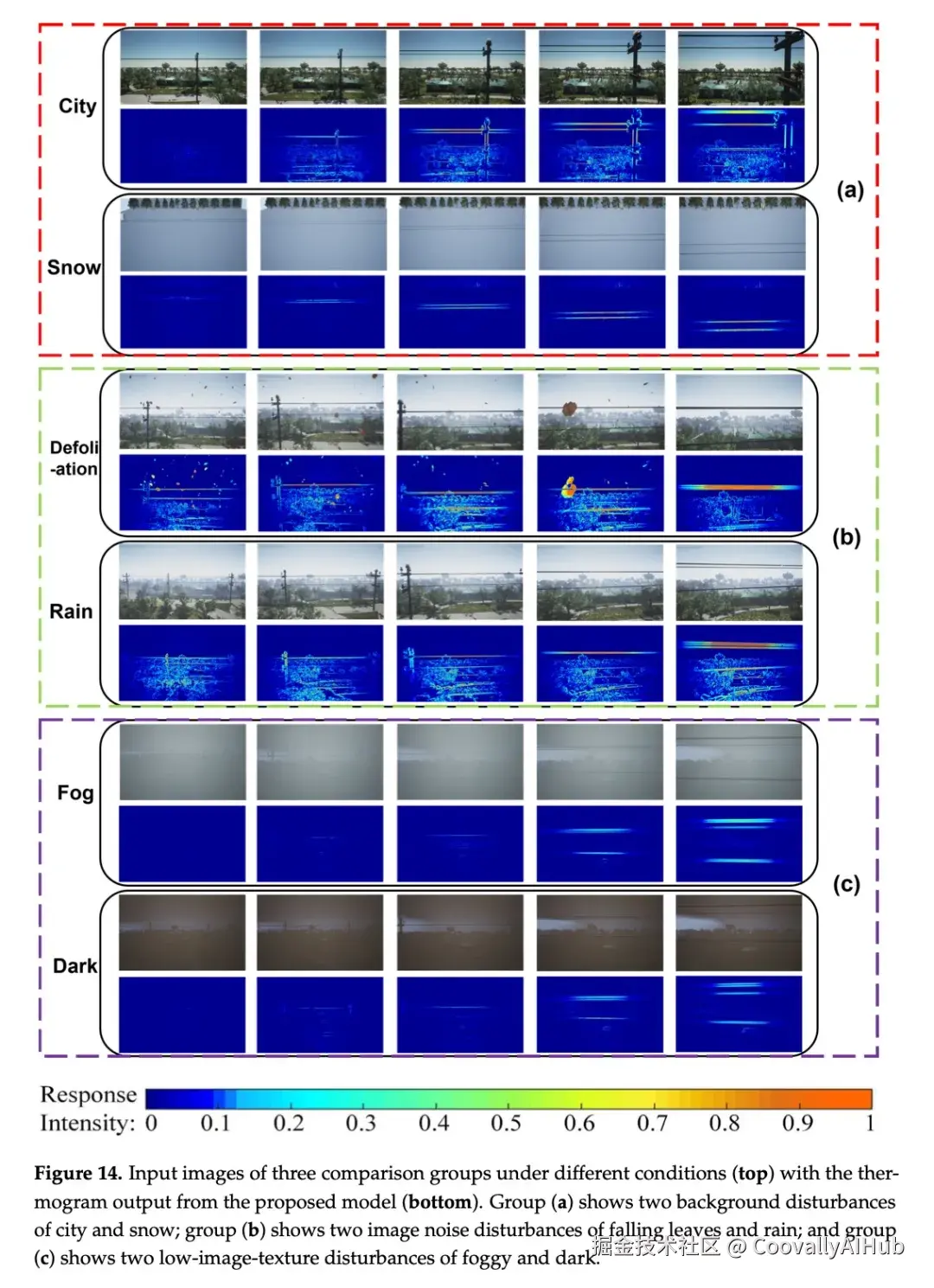
对比对象:霍夫变换(传统视觉)、D-LinkNet(深度学习语义分割)、D-LGMD(原始仿生模型)。任务:在复杂背景(城市、雪地、雾天、落叶)中检测逼近的电力线。关键发现:对电线的灵敏度:原始D-LGMD几乎无法检测到电线;而SILD通过注意力机制,在保持对常规物体响应的同时,对电线的响应强度提升了数倍。计算效率:与需要大规模算力的D-LinkNet不同,SILD基于运动视觉和轻量卷积,在NVIDIA Orin NX上实现了低延迟运行,完美适配小型无人机的电源与载荷限制。鲁棒性:在雾天、低光照等高噪声环境下,基于运动信息的SILD比基于静态纹理的深度学习方法表现更稳定,不易因图像模糊而漏检。
真实世界验证:部署与飞行
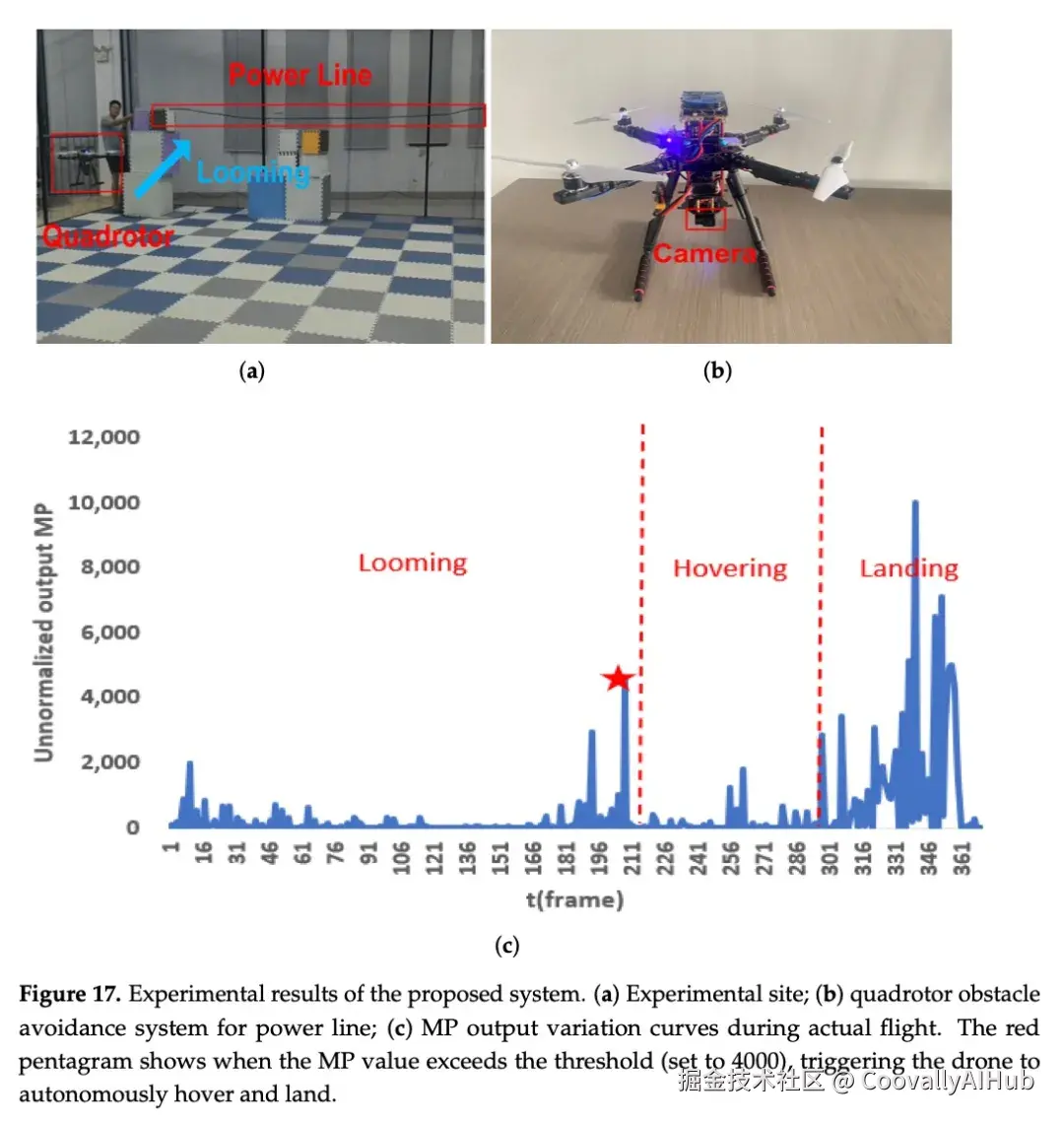
理论终需实践检验。研究团队将SILD部署于四旋翼无人机,搭载NVIDIA Orin NX与单目相机,在真实电力线场景中进行了避障测试。
结果:无人机能够在飞行过程中成功感知前方交叉电力线的逼近风险,并做出基础避障响应。这证明了该模型从仿真到现实的迁移能力,为电力线场景的无人机全自主避障提供了可行的新思路。
挑战与未来展望
尽管SILD在电力线检测上展现了巨大潜力,但研究团队也指出了未来的优化方向:精细化触发控制:当前模型检测到威胁后可能触发急停。未来将结合G层输出,优化策略(如小幅提升飞行高度绕过),避免不必要的任务中断。360°环境感知:鉴于模型极低的计算需求,未来可集成多方向或全景相机,消除视觉死角,进一步提升系统鲁棒性。特征增强的泛化:探索如何将这种基于特定形状特征增强的机制,推广到其他特殊障碍物(如鸟类、风筝线)的检测中。
结论
SILD模型的成功,证明了仿生视觉在边缘计算场景下的巨大潜力。它没有陷入深度学习"堆数据、堆算力"的惯性思维,而是回归到视觉的本质------运动与威胁的感知。对于无人机电力巡检行业而言,SILD提供了一种兼顾高精度与低延迟的碰撞检测方案。它不仅能让无人机"看见"电线,更能让无人机 "本能"地躲开电线。这或许是解决无人机最后100米安全返航难题的关键一把钥匙。