文章目录
以下是一个测距的应用,在图像上计算目标离参考点的距离,测距的方法存在一些偶然性,例如目标检测模型在某一帧里面没有检测到物体,或者目标检测的框在目标物周围跳动,这些因素在实际的数值上就会表现出很多毛刺尖峰,但是目标物的移动都是平滑的不会跳变,在此场景下采用kalman滤波可以使距离值变得更加平滑。
原理
kalman滤波一:基础理论
kalman滤波二:二维目标跟踪
一维kalman滤波
测量的值是一个目标物离参考点的距离,在kalman滤波中状态变量考虑位置和速度两个变量。具体如下:
状态变量
x = d , d ˙ T x = d, \\dot{d}^T x=d,d˙T
d : 目标物离参考点的距离 d:目标物离参考点的距离 d:目标物离参考点的距离
d ˙ : 目标相对参考点的速度 \dot{d}: 目标相对参考点的速度 d˙:目标相对参考点的速度
测量值
z = d z = d z=d
状态转移矩阵
F = 1 Δ t 0 1 \mathbf{F}= \begin{bmatrix} 1 & \Delta{t} \\ 0 & 1 \end{bmatrix} F=10Δt1
示例代码:
python
import os
import numpy as np
import matplotlib.pyplot as plt
def generate_mock_data(n_points=100, start=0, noise_level=5):
"""
Generate mock distance data with a linear trend and some noise.
Args:
n_points : int - number of data points to generate.
start : float - starting value of the distance.
noise_level : float - standard deviation of the Gaussian noise.
Returns:
np.array - array of mock distance data.
"""
true_values = start + np.linspace(0, 10, n_points)
noisy_values = true_values + np.random.normal(0, noise_level, n_points)
return noisy_values
def demo_of_kalman():
# Generate mock data
distance_list = generate_mock_data(n_points=100, start=10, noise_level=5)
# Initialize Kalman Filter
kf = KalmanFilter()
predict_list = []
# Run Kalman Filter on the mock data
for distance in distance_list:
kf.update(np.array([[distance]]))
predict = kf.predict()
predict_list.append(predict[0][0])
# Plotting the results
frame_id = np.arange(len(distance_list))
frame_id = frame_id * 4 # Assuming data is collected at a rate of 4 Hz
plt.figure(figsize=(10, 6))
plt.plot(frame_id, distance_list, label="Measured Distance")
plt.plot(frame_id, predict_list, label="Kalman Filter Prediction", linestyle='--')
plt.xlabel("Frame ID")
plt.ylabel("Distance")
plt.title("Kalman Filter Demo")
plt.legend()
plt.grid(True)
plt.show()
class KalmanFilter:
def __init__(self):
self.dt = 1.0 / 25.0 * 4.0
self.F = np.array([[1, self.dt], [0, 1]]) # State transition matrix
self.H = np.array([[1, 0]]) # Observation matrix
self.Q = np.array([[1, 0], [0, 0.1]]) # Process noise covariance
self.R = np.array([[25]])
self.P = np.array([[1, 0], [0, 1]]) # State estimate covariance
self.x = np.array([[0], [0]])
def predict(self):
self.x = self.F.dot(self.x) # x(k) = F * x(k-1)
self.P = self.F.dot(self.P).dot(self.F.T) + self.Q
return self.x
def update(self, z):
K = self.P.dot(self.H.T).dot(np.linalg.inv(self.H.dot(self.P).dot(self.H.T) + self.R))
self.x = self.x + K.dot(z - self.H.dot(self.x))
S = np.eye(2) - K.dot(self.H)
self.P = S.dot(self.P).dot(S.T) + K.dot(self.R).dot(K.T)
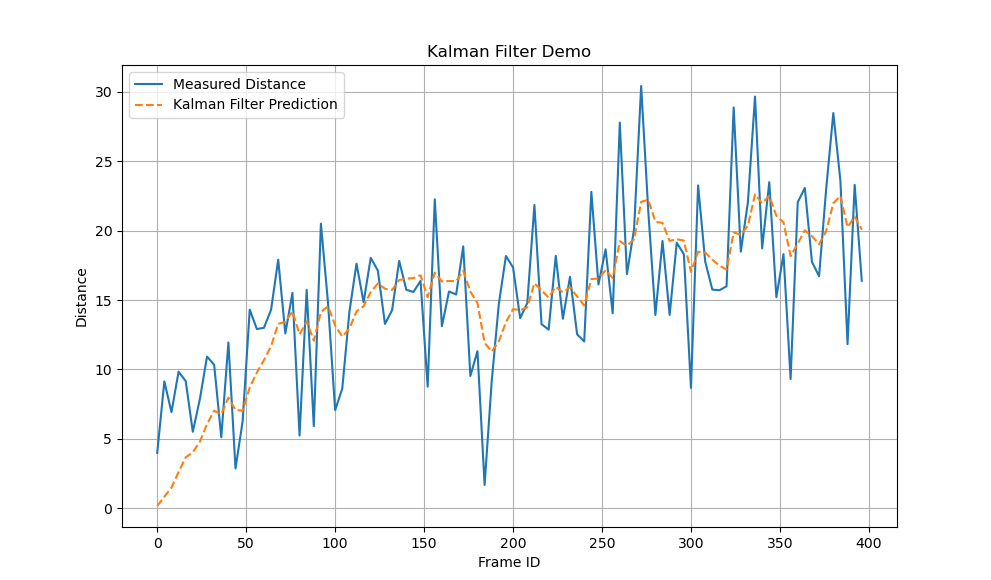
if __name__ == "__main__":
demo_of_kalman()运行结果:
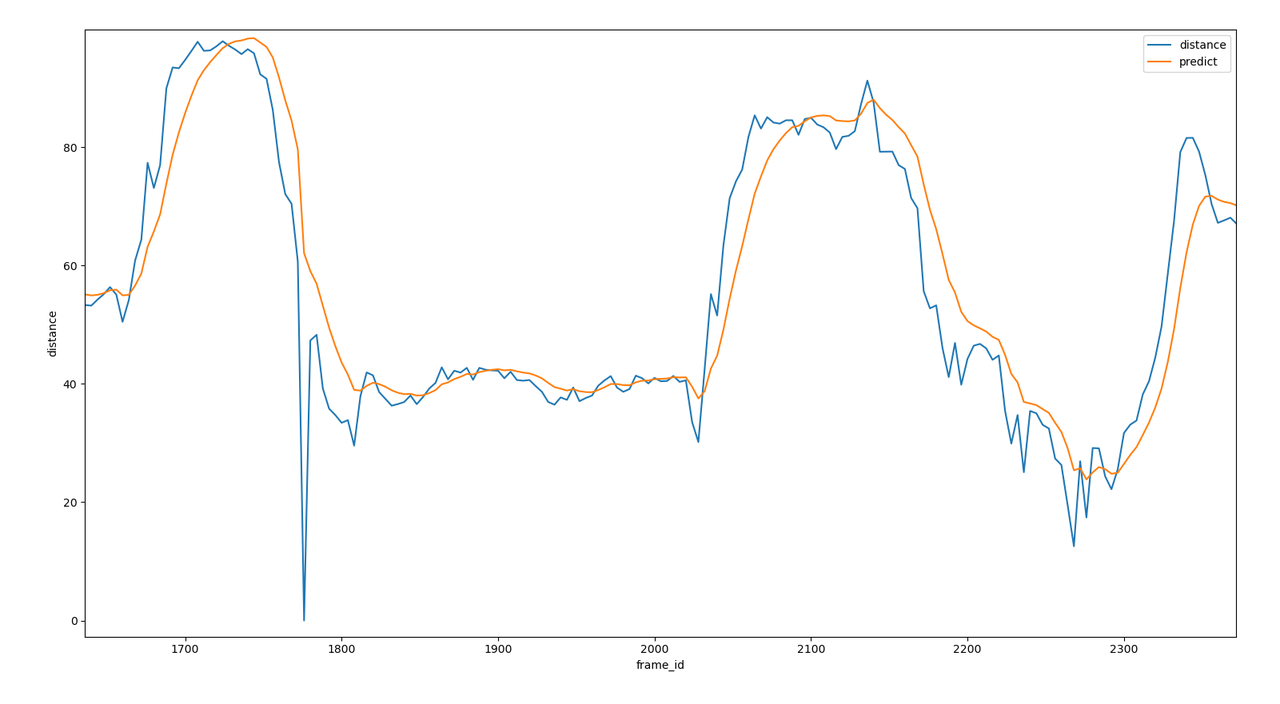
真实场景示例
以下是真实场景中使用kalman滤波的距离,可以看到一维kalman滤波不仅很好的滤除了尖峰毛刺还有部分缺失数据,而且能很好的跟上真实数据的变化。