往期知识点记录:
平台驱动移植
在这一步,我们会在源码目录 //device/vendor_name/soc_name/drivers 目录下创建平台驱动,如果你要移植的 SOC 的厂商还没有创建仓库的话,请联系 sig_devboard 创建。
建议的目录结构:
device
├── vendor_name
│ ├── drivers
│ │ │ ├── common
│ │ │ ├── Kconfig # 厂商驱动内核菜单入口
│ │ │ └── lite.mk # 构建的入口
│ ├── soc_name
│ │ ├── drivers
│ │ │ ├── dmac
│ │ │ ├── gpio
│ │ │ ├── i2c
│ │ │ ├── LICENSE
│ │ │ ├── mipi_dsi
│ │ │ ├── mmc
│ │ │ ├── pwm
│ │ │ ├── README.md # docs 如果需要的话
│ │ │ ├── README_zh.md
│ │ │ ├── rtc
│ │ │ ├── spi
│ │ │ ├── uart
│ │ │ └── watchdog
│ ├── board_nameHDF 为所有的平台驱动都创建了驱动模型,移植平台驱动的主要工作是向模型注入实例。 这些模型你可以在源码目录 //drivers/hdf_core/framework/support/platform/include 中找到定义。
本节我们会以 GPIO 为例,讲解如何移植平台驱动,移植过程包含以下步骤:
-
创建 GPIO 驱动
在源码目录//device/vendor_name/soc_name/drivers/gpio中创建文件soc_name_gpio.c。内容模板如下:#include "gpio_core.h" // 定义GPIO结构体,如果需要的话 struct SocNameGpioCntlr { struct GpioCntlr cntlr; // 这是HDF GPIO驱动框架需要的结构体 int myData; // 以下是当前驱动自身需要的 }; // Bind 方法在HDF驱动中主要用户对外发布服务,这里我们不需要,直接返回成功即可 static int32_t GpioBind(struct HdfDeviceObject *device) { (void)device; return HDF_SUCCESS; } // Init方法时驱动初始化的入口,我们需要在Init方法中完成模型实例的注册 static int32_t GpioInit(struct HdfDeviceObject *device) { SocNameGpioCntlr *impl = CreateGpio(); // 你的创建代码 ret = GpioCntlrAdd(&impl->cntlr); // 注册GPIO模型实例 if (ret != HDF_SUCCESS) { HDF_LOGE("%s: err add controller:%d", __func__, ret); return ret; } return HDF_SUCCESS; } // Release方法会在驱动卸载时被调用,这里主要完成资源回收 static void GpioRelease(struct HdfDeviceObject *device) { // GpioCntlrFromDevice 方法能从抽象的设备对象中获得init方法注册进去的模型实例。 struct GpioCntlr *cntlr = GpioCntlrFromDevice(device); //资源释放... } struct HdfDriverEntry g_gpioDriverEntry = { .moduleVersion = 1, .Bind = GpioBind, .Init = GpioInit, .Release = GpioRelease, .moduleName = "SOC_NAME_gpio_driver", // 这个名字我们稍后会在配置文件中用到,用来加载驱动。 }; HDF_INIT(g_gpioDriverEntry); // 注册一个GPIO的驱动入口 -
创建厂商驱动构建入口
如前所述device/vendor_name/drivers/lite.mk是厂商驱动的构建的入口。我们需要从这个入口开始,进行构建。#文件device/vendor_name/drivers/lite.mk SOC_VENDOR_NAME := $(subst $/",,$(LOSCFG_DEVICE_COMPANY)) SOC_NAME := $(subst $/",,$(LOSCFG_PLATFORM)) BOARD_NAME := $(subst $/",,$(LOSCFG_PRODUCT_NAME)) # 指定SOC进行构建 LIB_SUBDIRS += $(LITEOSTOPDIR)/../../device/$(SOC_VENDOR_NAME)/$(SOC_NAME)/drivers/ -
创建 SOC 驱动构建入口
#文件device/vendor_name/soc_name/drivers/lite.mk SOC_DRIVER_ROOT := $(LITEOSTOPDIR)/../../device/$(SOC_VENDOR_NAME)/$(SOC_NAME)/drivers/ # 判断如果打开了GPIO的内核编译开关 ifeq ($(LOSCFG_DRIVERS_HDF_PLATFORM_GPIO), y) # 构建完成要链接一个叫hdf_gpio的对象 LITEOS_BASELIB += -lhdf_gpio # 增加构建目录gpio LIB_SUBDIRS += $(SOC_DRIVER_ROOT)/gpio endif # 后续其他驱动在此基础上追加 -
创建 GPIO 构建入口
include $(LITEOSTOPDIR)/config.mk include $(LITEOSTOPDIR)/../../drivers/adapter/khdf/liteos/lite.mk # 指定输出对象的名称,注意要与SOC驱动构建入口里的LITEOS_BASELIB 保持一致 MODULE_NAME := hdf_gpio # 增加HDF框架的INCLUDE LOCAL_CFLAGS += $(HDF_INCLUDE) # 要编译的文件 LOCAL_SRCS += soc_name_gpio.c # 编译参数 LOCAL_CFLAGS += -fstack-protector-strong -Wextra -Wall -Werror -fsigned-char -fno-strict-aliasing -fno-common include $(HDF_DRIVER) -
配置产品加载驱动
产品的所有设备信息被定义在源码文件//vendor/vendor_name/product_name/config/device_info/device_info.hcs中。
平台驱动请添加到 platform 的 host 中。
说明:
moduleName 要与驱动定义中的相同。
root {
...
platform :: host {
device_gpio :: device {
device0 :: deviceNode {
policy = 0;
priority = 10;
permission = 0644;
moduleName = "SOC_NAME_gpio_driver";
}
}
}
}最后
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
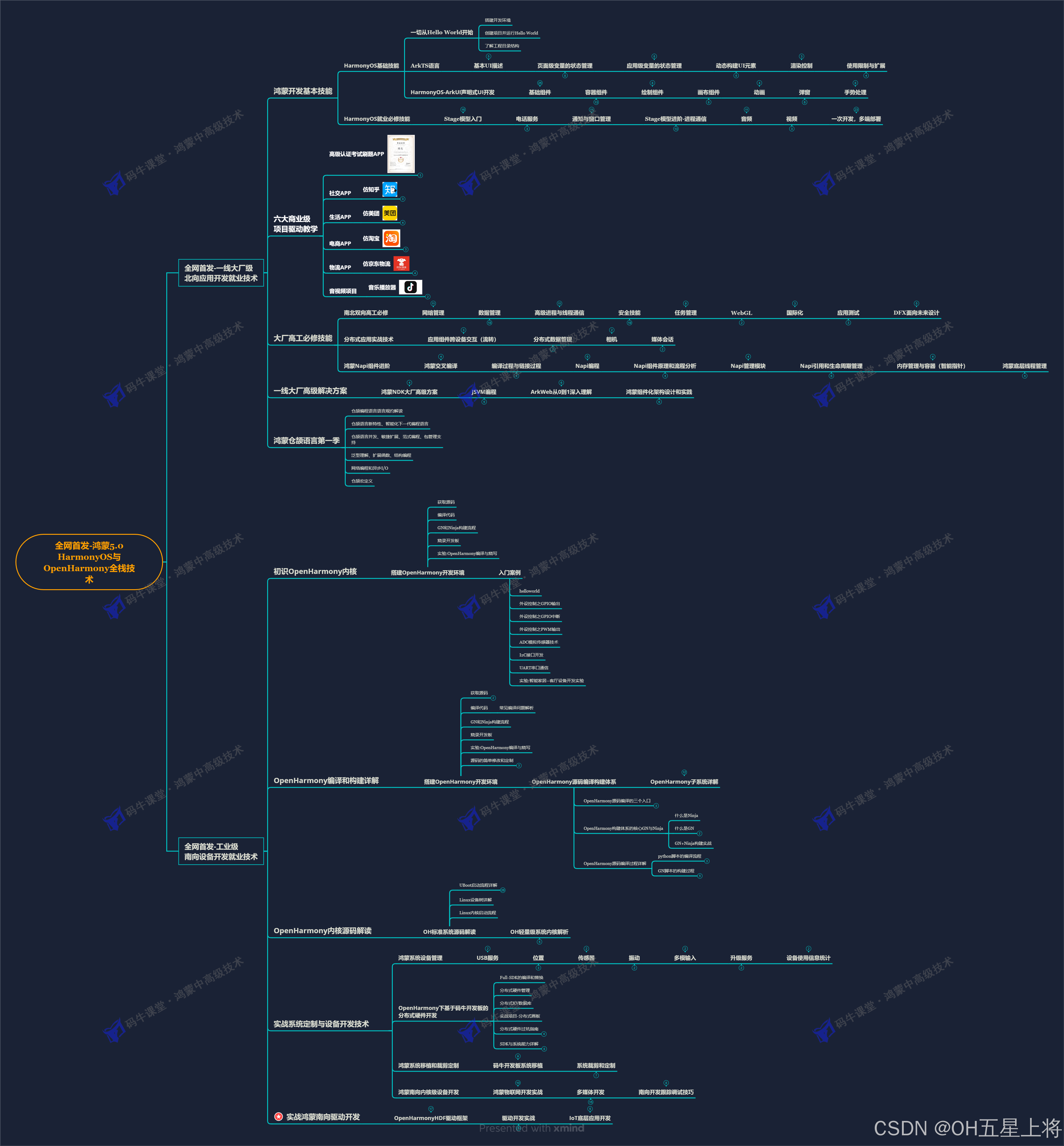
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。
《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN/733GH/overview
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.......
鸿蒙开发面试真题(含参考答案):
《OpenHarmony源码解析》:
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ......
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ......
OpenHarmony 设备开发学习手册 :https://gitcode.com/HarmonyOS_MN/733GH/overview