- 首先预测一段时间内自车与周围车辆的行驶轨迹,之后检测每一时刻自车与周边车辆的轨迹是否会发生碰撞,代码如下:
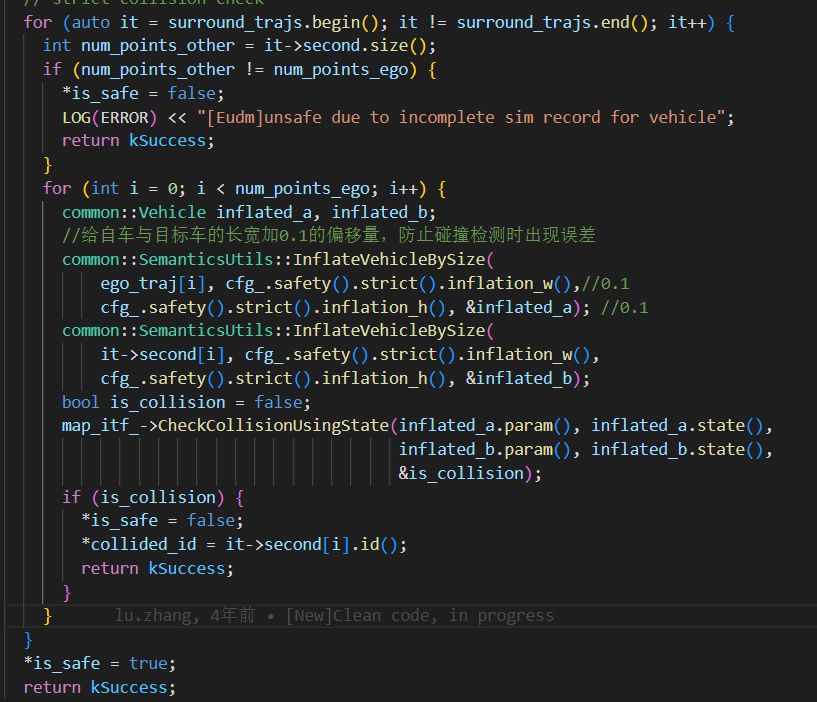
(1)首先将自车与周围车辆的长宽都加一个Offset值,代码中为0.1。
(2)基于当前的状态检查是否会发生碰撞
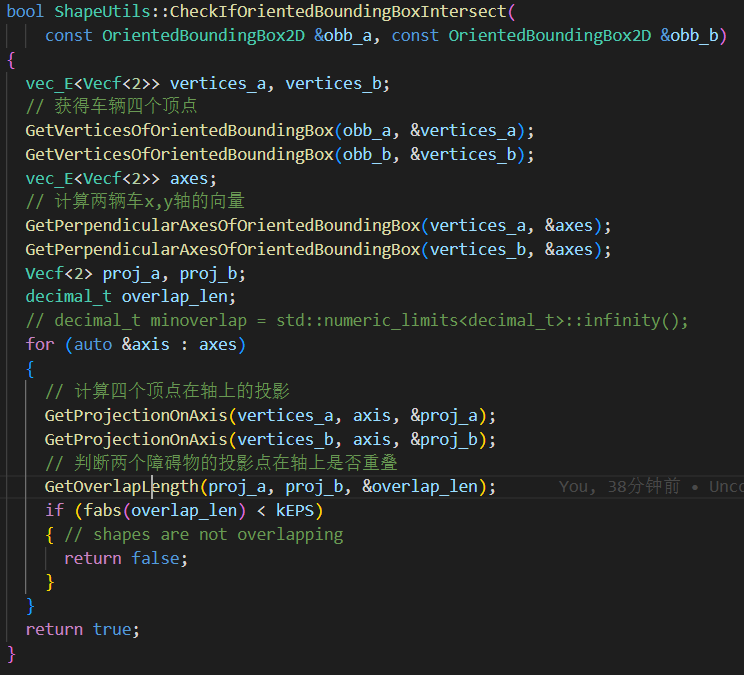
2.使用OBB算法检测两障碍物是否会发生碰撞,对自车与障碍物使用如下矩形box包络。
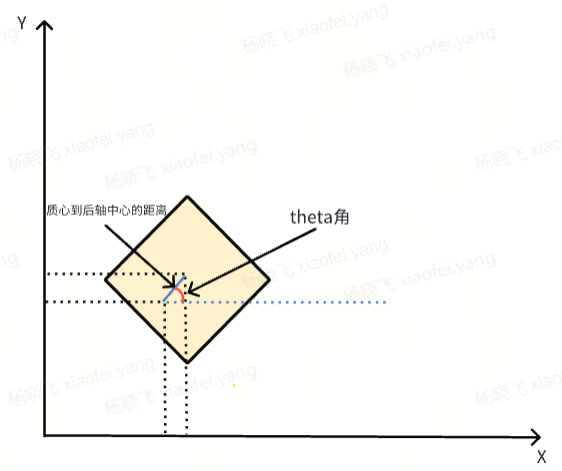
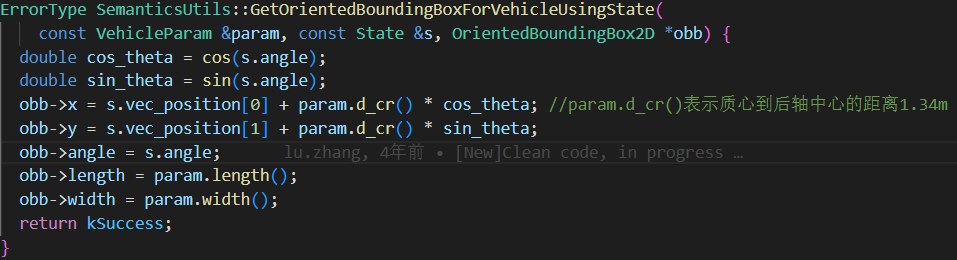
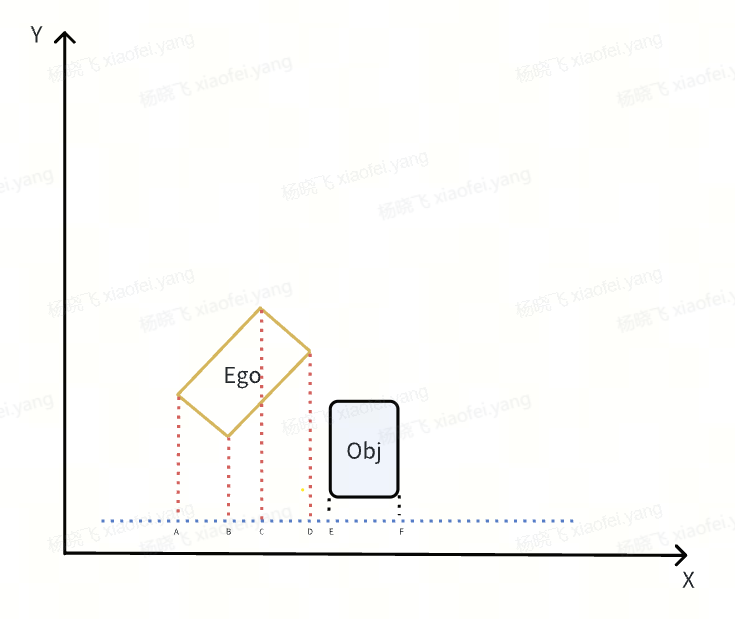
(1)车辆的坐标通常表示车辆后轴中心点处的坐标,首先需要计算自车与目标车质心的坐标,如下图所示。
代码如下:
2)分别计算自车与目标车四个角点的位置坐标,代码如下:
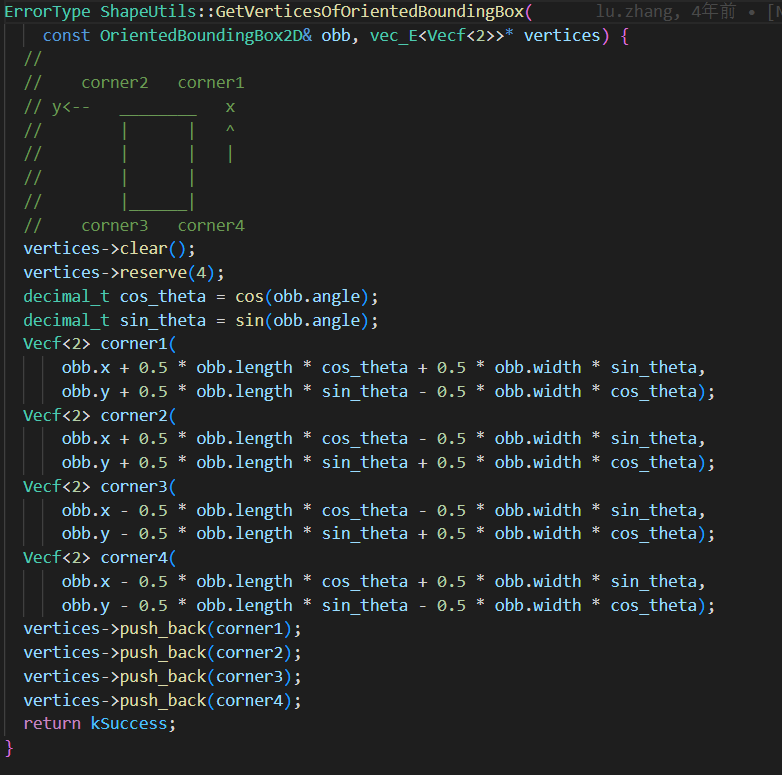
以自车右前方角点为例,如下图所示:
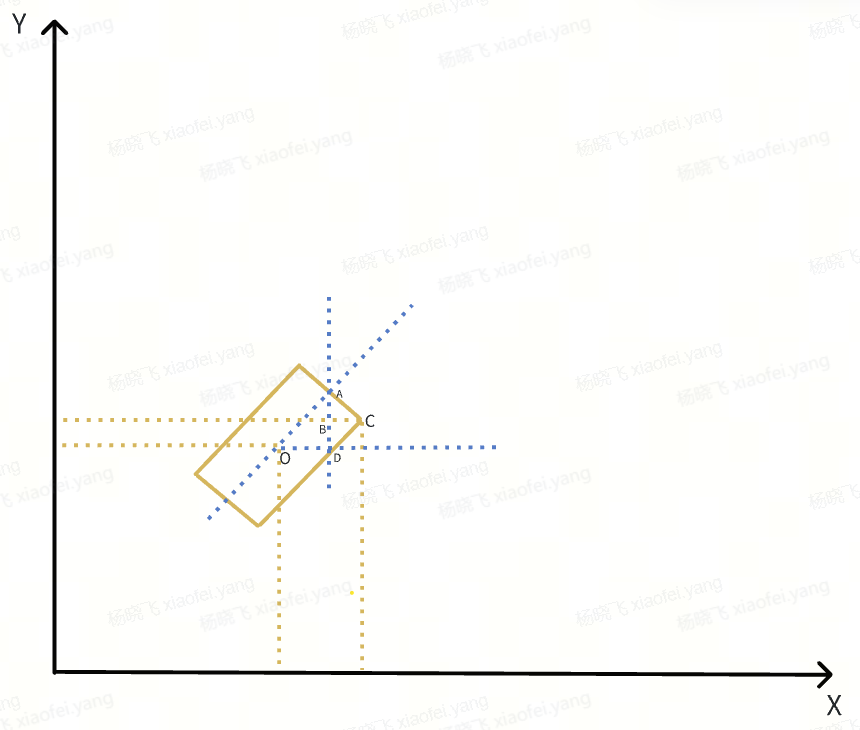
O为车辆质心的位置(x,y),计算C点的坐标为:(x+OD+BC,y+AD-AB)
OD = 0.5*obb.Length*cos_theta
BC = 0.5*obb.Width*sin_theta
AD = 0.5*obb.Length*sin_theta
AB = 0.5*obb.Width*cos_theta
其他角点的坐标算法同理。
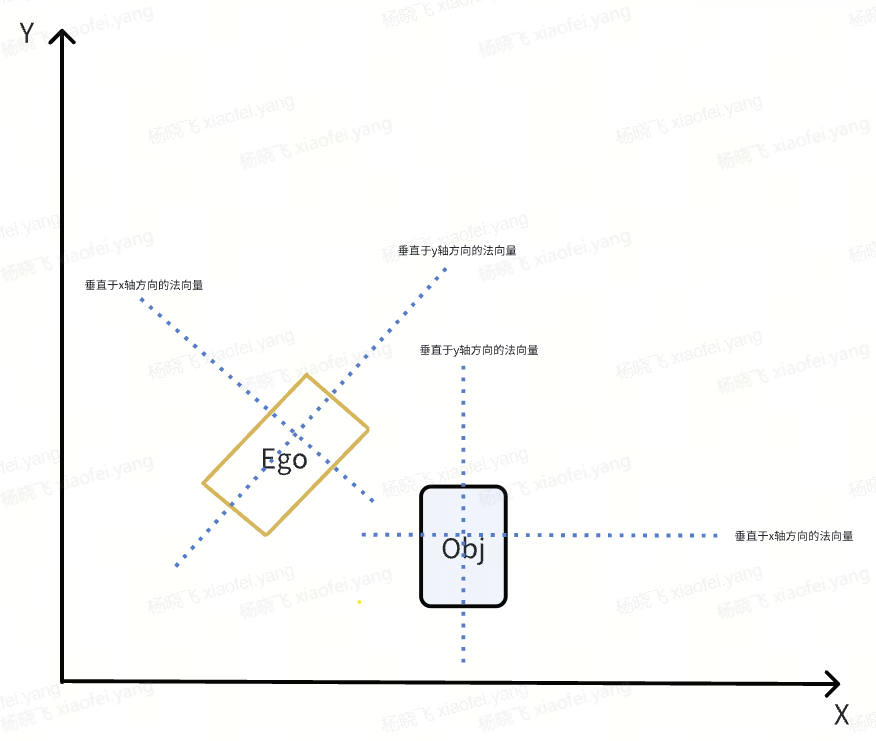
(3)分别计算自车与目标车x轴,y轴方向的法向量
代码如下:
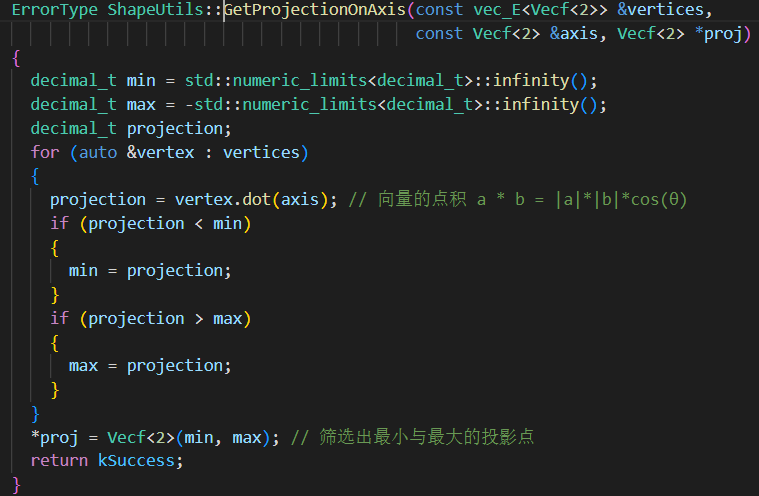
(4)分别计算自车与目标车的四个顶点在四条轴上的投影,如下图所示:
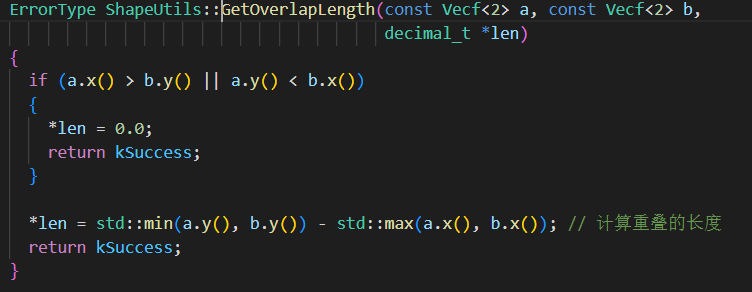
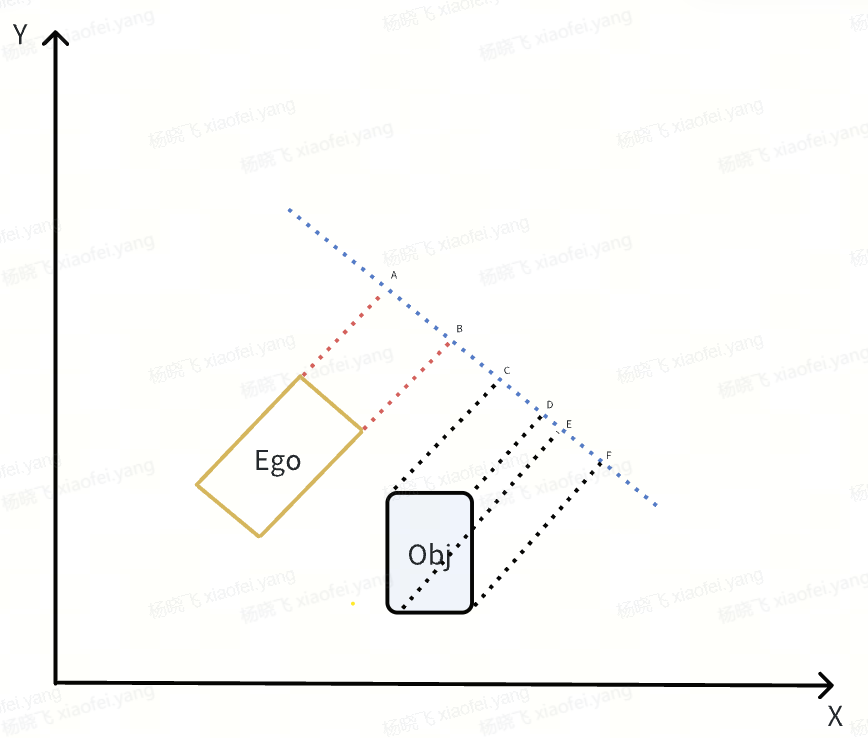
如上图所示,A,B分别为自车的四个顶点在自车在法向量上的投影点,C,D,E,F分别为目标车在法向量上的投影点,筛选出最小与最大的投影点,假设自车最小的投影点为B,最大的投影点为A,则目标车最小的投影点为F,最大的投影点为C,计算两障碍物最大投影点与最小投影点区间的重叠长度,若存在一侧重叠长度为0,则该目标不会发生碰撞,上图重叠长度为AF,所以该投影算出的结果会发生碰撞。
如上图所示,A,B分别为自车的四个顶点在自车在法向量上的投影点,C,D,E,F分别为目标车在法向量上的投影点,筛选出最小与最大的投影点,假设自车最小的投影点为B,最大的投影点为A,则目标车最小的投影点为F,最大的投影点为C,计算两障碍物最大投影点与最小投影点区间的重叠长度,上图AB与AF之间没有重叠,所以直接返回在该时刻两目标不会发生碰撞。

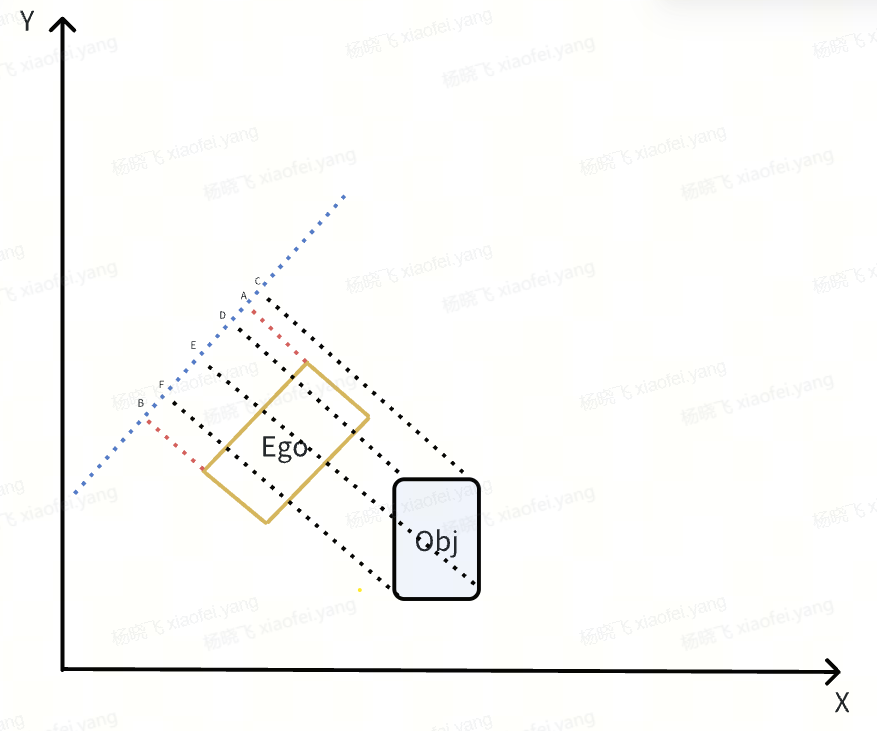
如上图所示,A,B,C,D分别为自车的四个顶点在自车在法向量上的投影点,E,F分别为目标车在法向量上的投影点,筛选出最小与最大的投影点,假设自车最小的投影点为D,最大的投影点为A,则目标车最小的投影点为F,最大的投影点为E,计算两障碍物最大投影点与最小投影点区间的重叠长度,上图AD与EF之间的重叠长度为ED,所以该投影算出的结果会发生碰撞。
如上图所示,A,B,C,D分别为自车的四个顶点在自车在法向量上的投影点,E,F分别为目标车在法向量上的投影点,筛选出最小与最大的投影点,假设自车最小的投影点为D,最大的投影点为A,则目标车最小的投影点为F,最大的投影点为E,计算两障碍物最大投影点与最小投影点区间的重叠长度,上图AD与EF之间没有重叠,所以直接返回在该时刻两目标不会发生碰撞。
(5)综上所述,该时刻两目标不会发生碰撞,代码如下: