240929-CGAN条件生成对抗网络
前面我们学习了GAN(240925-GAN生成对抗网络-CSDN博客)和DCGAN(240929-DCGAN生成漫画头像-CSDN博客),接下来继续来看CGAN(Conditional GAN)条件生成对抗网络。
流程
首先我们来复习下GAN的流程。
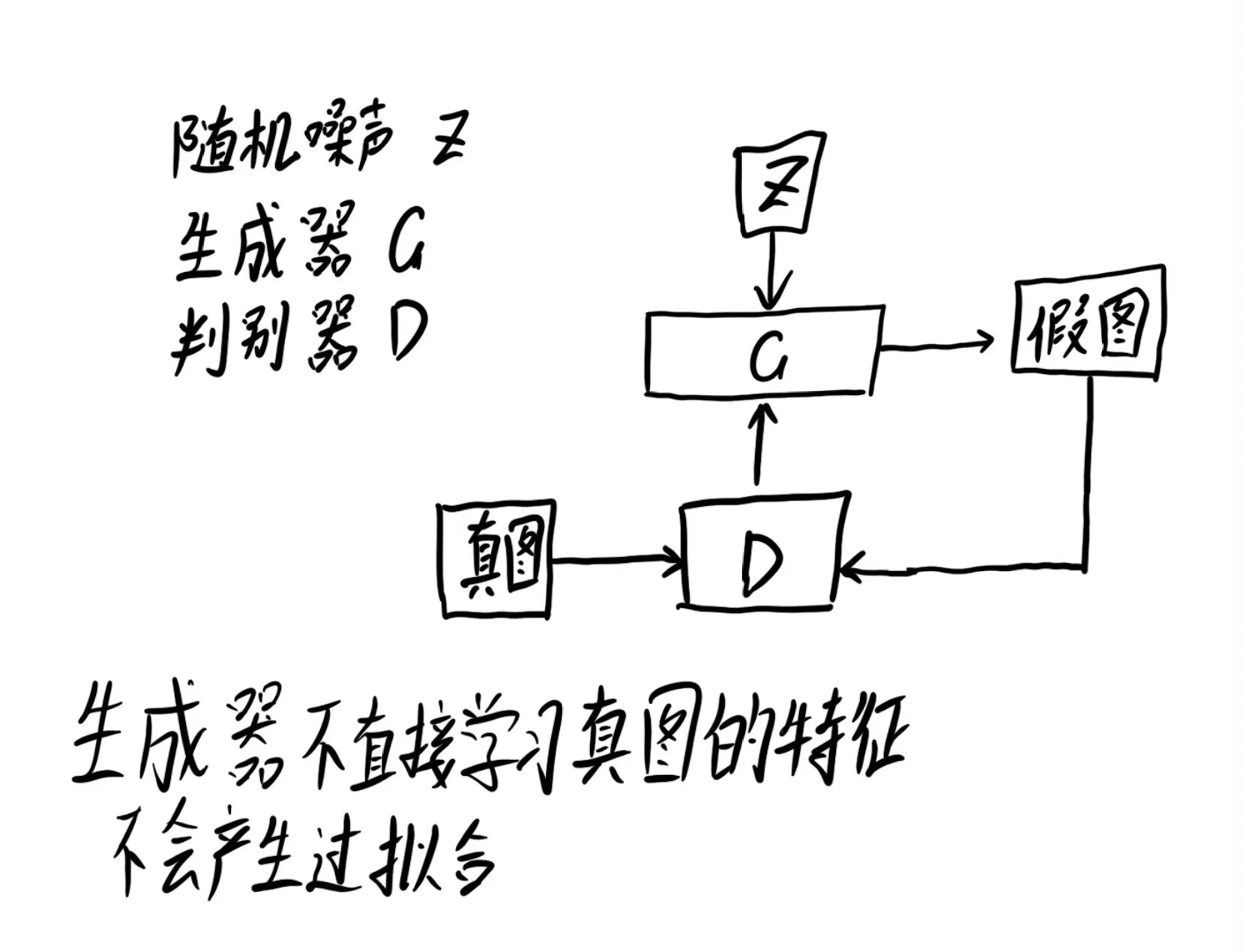
首先生成一组随机噪声,把这组随机噪声传入G,G生成一组假数据,这组假数据和真数据作为输入传入D,然后根据误差来优化判别器,判别器优化完成后,评估真假数据就变得很容易,此时就要反过来优化生成器,之后生成器水平提高了,又要反过来优化判别器,就这样循环往复竞争对抗,直到达到一个动态的均衡(纳什均衡),判别模型再也判断不出结果,准确率为50%,约等于乱猜。
而CGAN的流程与此有所区别,主要在于加入了条件标签的概念
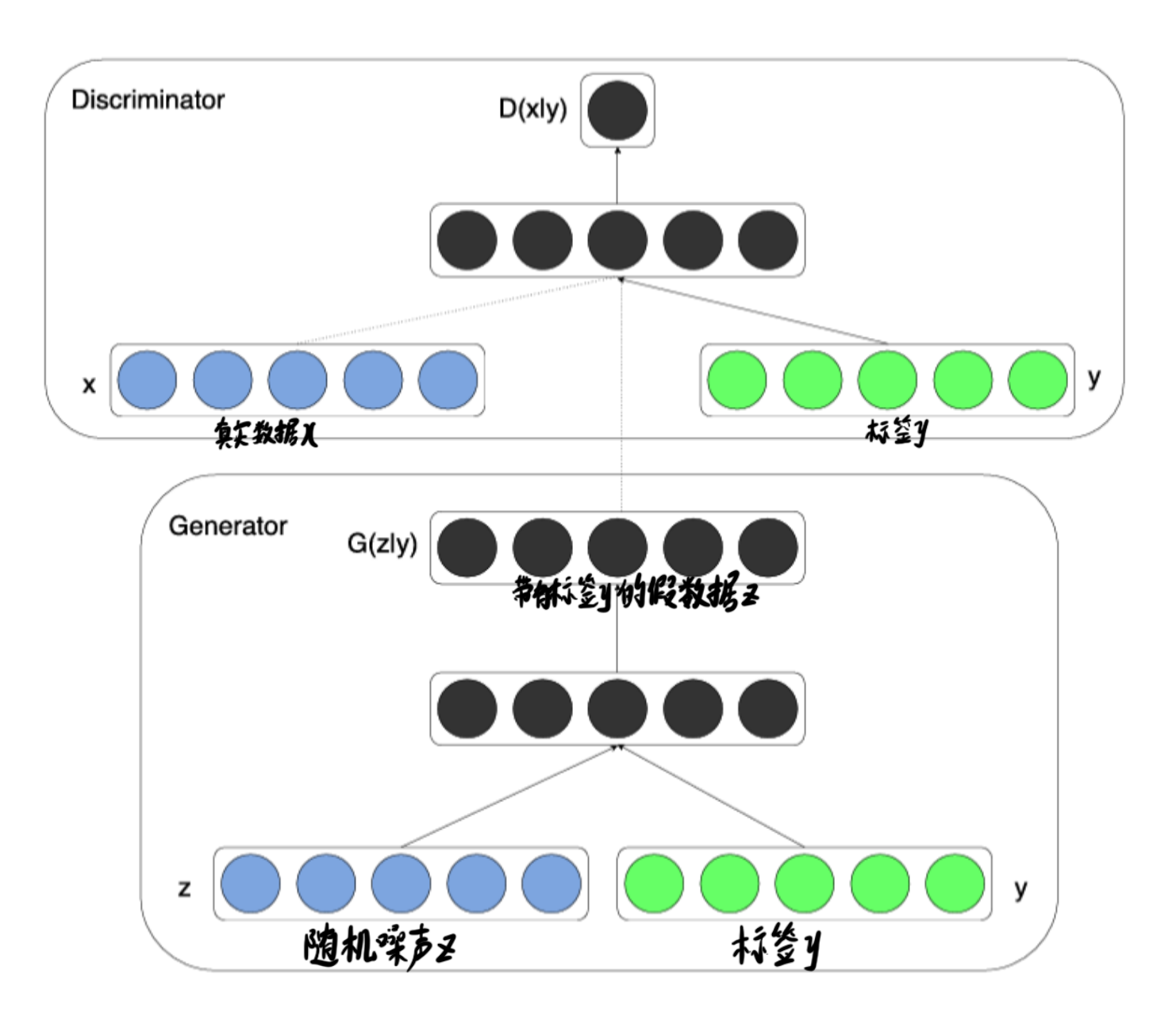
拆分开分别看生成器和判别器
生成器
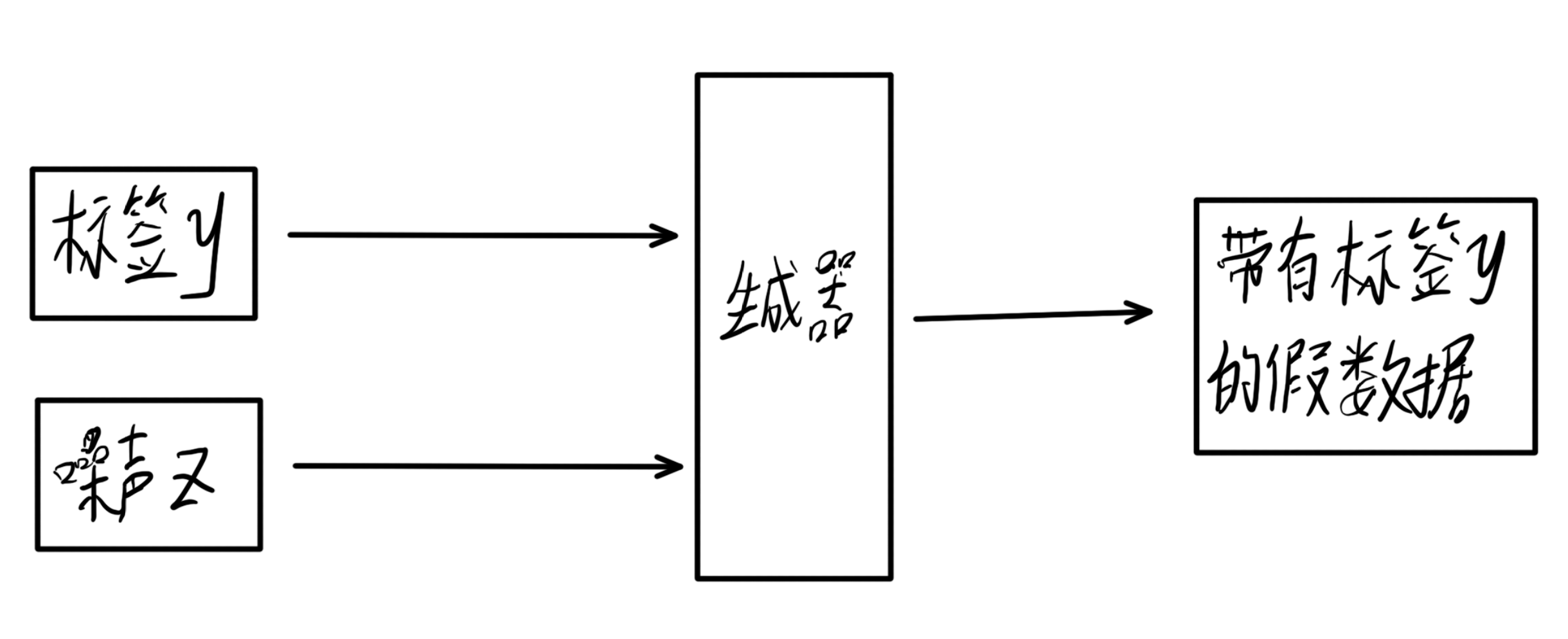
生成器接收标签y和噪声z,输出一个力求与标签相匹配的为样本,用来蒙骗判别器。
判别器
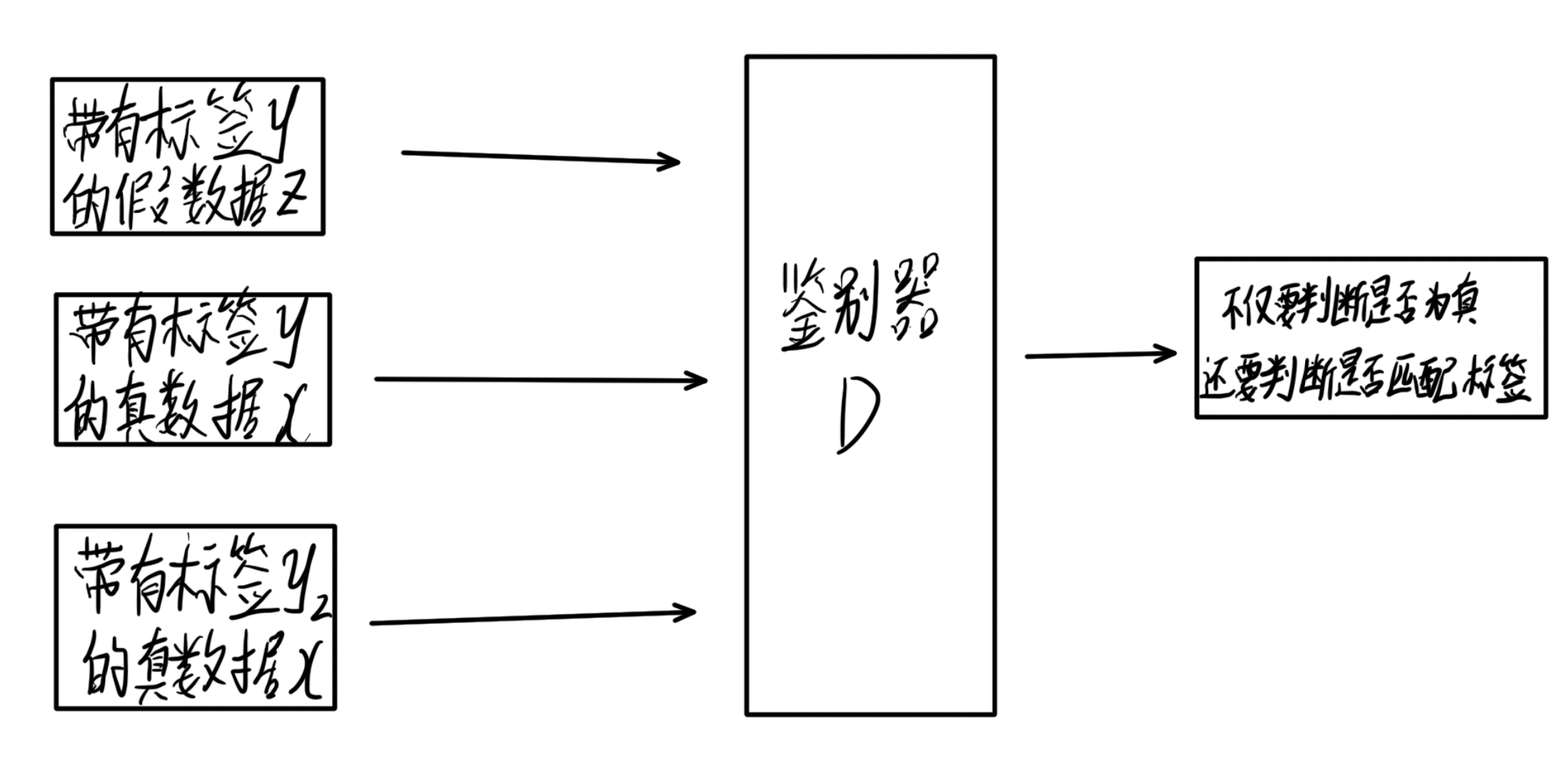
判别器接收三个数据,真实数据x,标签y,带有标签y的假数据z,此时,判别器不仅要判断数据是否为真,还要判断数据和标签是否匹配,而后接收真实且匹配的数据。
目标函数
接下来我们看目标函数的对比:
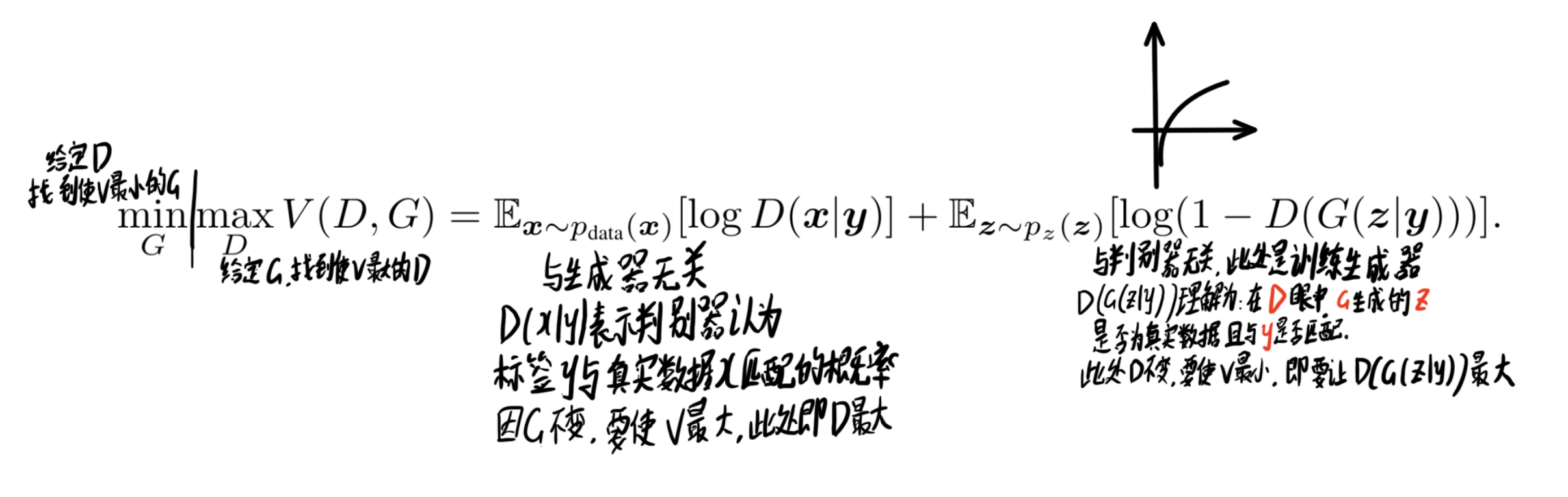
GAN:
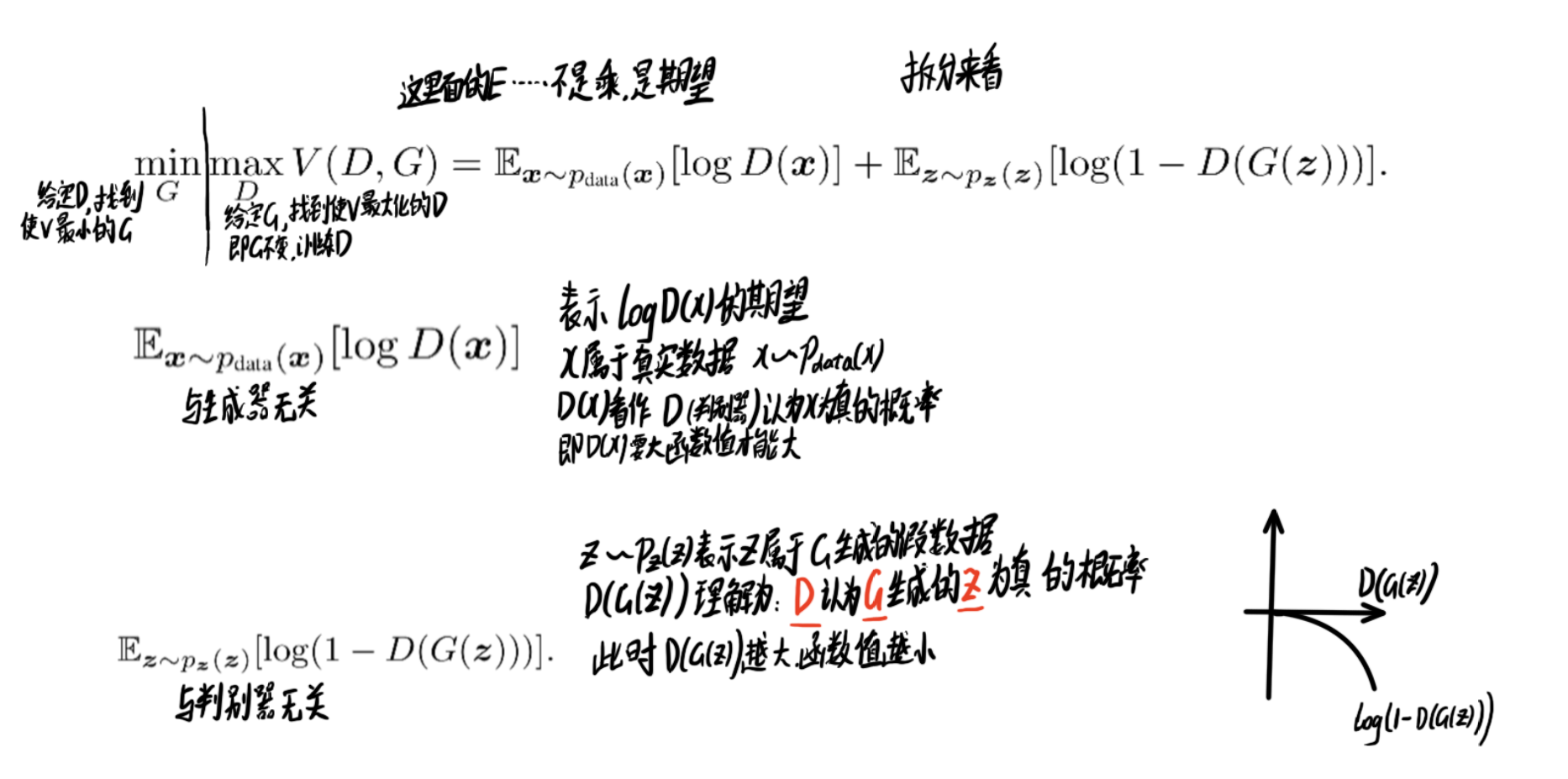
CGAN:
实战案例(Pix2Pix实现图像转换)
下面做一个实战案例
数据处理
在本次实验中,我们使用经过处理的外墙(facades)数据集
python
from download import download
url = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/models/application/dataset_pix2pix.tar"
download(url, "./dataset", kind="tar", replace=True)下载之后我们可视化部分数据集,看看长什么样子
python
from mindspore import dataset as ds
import matplotlib.pyplot as plt
dataset = ds.MindDataset("./dataset/dataset_pix2pix/train.mindrecord", columns_list=["input_images", "target_images"], shuffle=True)
data_iter = next(dataset.create_dict_iterator(output_numpy=True))
# 可视化部分训练数据
plt.figure(figsize=(10, 3), dpi=140)
for i, image in enumerate(data_iter['input_images'][:10], 1):
plt.subplot(3, 10, i)
plt.axis("off")
plt.imshow((image.transpose(1, 2, 0) + 1) / 2)
plt.show()
网络结构搭建
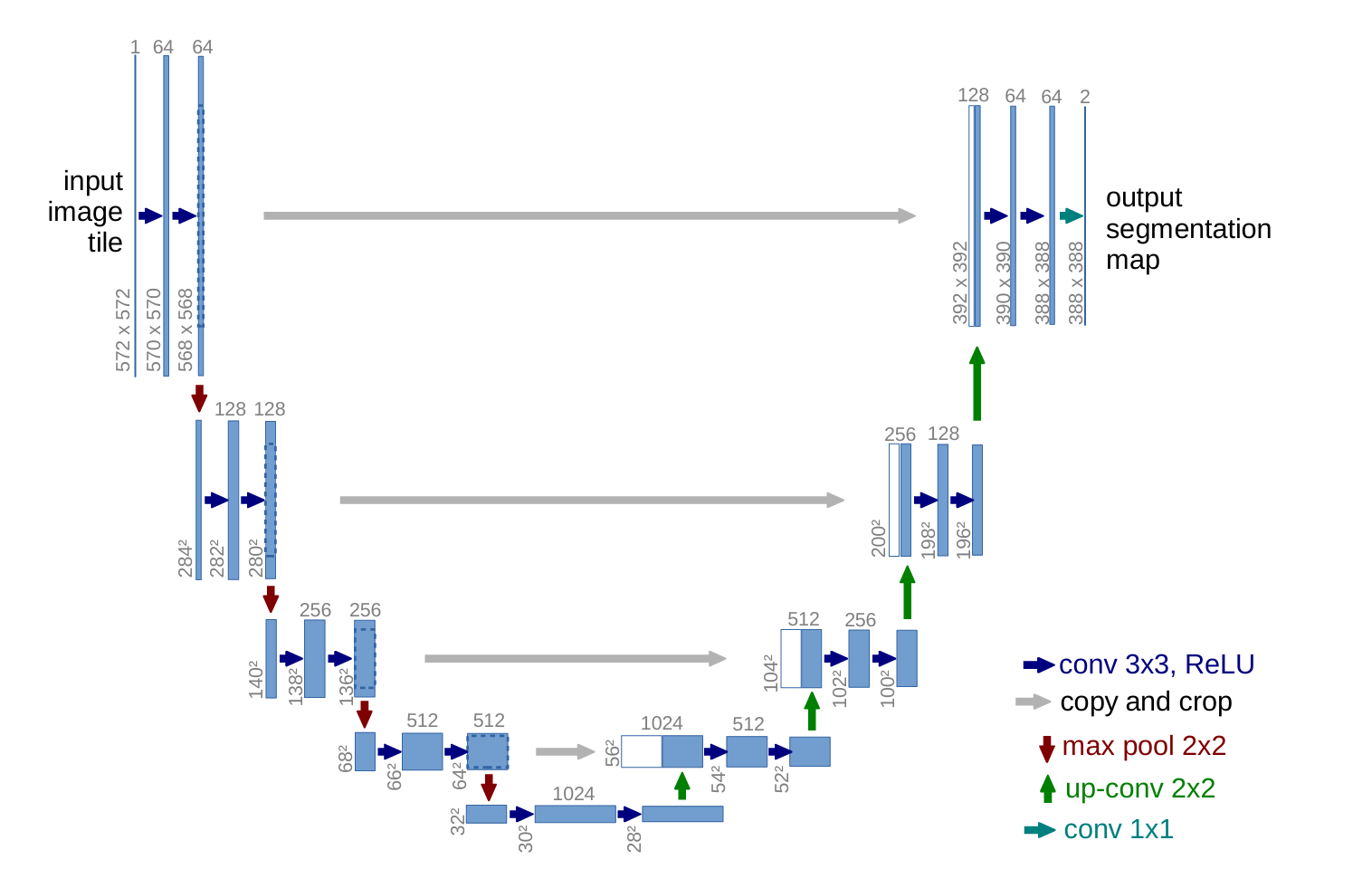
生成器G用到的是U-Net结构,输入的轮廓图𝑥x编码再解码成真是图片,判别器D用到的是作者自己提出来的条件判别器PatchGAN,判别器D的作用是在轮廓图 𝑥x的条件下,对于生成的图片𝐺(𝑥)G(x)判断为假,对于真实判断为真。
生成器
U-Net简单结构可以参考笔者编写一个简单的UNet图像分割网络_(二)网络结构搭建_unet网络怎么简单的画出来-CSDN博客,简单参考即可。
首先我们定义UNet Skip Connection Block块。这部分代码可能不太好理解,不急看懂,先继续往下看(也可能只是我太蠢没看懂,但往下看我会解释清楚结构)
python
import mindspore
import mindspore.nn as nn
import mindspore.ops as ops
class UNetSkipConnectionBlock(nn.Cell):
"""
定义UNet的跳跃连接块。
参数:
outer_nc (int): 输入和输出通道的数量。
inner_nc (int): 内部层的通道数量。
in_planes (int, optional): 输入平面的数量。默认为None,表示与outer_nc相同。
dropout (bool, optional): 是否使用dropout。默认为False。
submodule (nn.Cell, optional): 内部的UNet模块。
outermost (bool, optional): 是否为最外层的UNet块。默认为False。
innermost (bool, optional): 是否为最内层的UNet块。默认为False。
alpha (float, optional): LeakyReLU的负斜率。默认为0.2。
norm_mode (str, optional): 正则化模式 ('batch' 或 'instance')。默认为'batch'。
返回:
UNet跳跃连接块的实例。
"""
def __init__(self, outer_nc, inner_nc, in_planes=None, dropout=False,
submodule=None, outermost=False, innermost=False, alpha=0.2, norm_mode='batch'):
super(UNetSkipConnectionBlock, self).__init__()
# 定义下采样和上采样的正则化层
down_norm = nn.BatchNorm2d(inner_nc)
up_norm = nn.BatchNorm2d(outer_nc)
# 根据正则化模式判断是否需要使用偏置
use_bias = False
if norm_mode == 'instance':
down_norm = nn.BatchNorm2d(inner_nc, affine=False)
up_norm = nn.BatchNorm2d(outer_nc, affine=False)
use_bias = True
# 确定输入平面的数量
if in_planes is None:
in_planes = outer_nc
# 定义下采样的卷积层和激活函数
down_conv = nn.Conv2d(in_planes, inner_nc, kernel_size=4,
stride=2, padding=1, has_bias=use_bias, pad_mode='pad')
down_relu = nn.LeakyReLU(alpha)
# 定义上采样的激活函数
up_relu = nn.ReLU()
# 根据是否为最外层、最内层或其他情况,定义上采样层和模型结构
if outermost:
up_conv = nn.Conv2dTranspose(inner_nc * 2, outer_nc,
kernel_size=4, stride=2,
padding=1, pad_mode='pad')
down = [down_conv]
up = [up_relu, up_conv, nn.Tanh()]
model = down + [submodule] + up
elif innermost:
up_conv = nn.Conv2dTranspose(inner_nc, outer_nc,
kernel_size=4, stride=2,
padding=1, has_bias=use_bias, pad_mode='pad')
down = [down_relu, down_conv]
up = [up_relu, up_conv, up_norm]
model = down + up
else:
up_conv = nn.Conv2dTranspose(inner_nc * 2, outer_nc,
kernel_size=4, stride=2,
padding=1, has_bias=use_bias, pad_mode='pad')
down = [down_relu, down_conv, down_norm]
up = [up_relu, up_conv, up_norm]
model = down + [submodule] + up
if dropout:
model.append(nn.Dropout(p=0.5))
# 将模型结构封装为顺序序列
self.model = nn.SequentialCell(model)
# 记录是否为最外层,用于判断是否需要添加跳跃连接
self.skip_connections = not outermost
def construct(self, x):
"""
执行UNet跳跃连接块的前向传播。
参数:
x (Tensor): 输入张量。
返回:
Tensor: 经过UNet块处理后的输出张量。
"""
out = self.model(x)
# 根据是否为最外层,决定是否添加跳跃连接
if self.skip_connections:
out = ops.concat((out, x), axis=1)
return out接下来搭建生成器网络
python
class UNetGenerator(nn.Cell):
def __init__(self, in_planes, out_planes, ngf=64, n_layers=8, norm_mode='bn', dropout=False):
super(UNetGenerator, self).__init__()
unet_block = UNetSkipConnectionBlock(ngf * 8, ngf * 8, in_planes=None, submodule=None,
norm_mode=norm_mode, innermost=True)
for _ in range(n_layers - 5):
unet_block = UNetSkipConnectionBlock(ngf * 8, ngf * 8, in_planes=None, submodule=unet_block,
norm_mode=norm_mode, dropout=dropout)
unet_block = UNetSkipConnectionBlock(ngf * 4, ngf * 8, in_planes=None, submodule=unet_block,
norm_mode=norm_mode)
unet_block = UNetSkipConnectionBlock(ngf * 2, ngf * 4, in_planes=None, submodule=unet_block,
norm_mode=norm_mode)
unet_block = UNetSkipConnectionBlock(ngf, ngf * 2, in_planes=None, submodule=unet_block,
norm_mode=norm_mode)
self.model = UNetSkipConnectionBlock(out_planes, ngf, in_planes=in_planes, submodule=unet_block,
outermost=True, norm_mode=norm_mode)
def construct(self, x):
return self.model(x)对生成器U-Net架构的一些赘述
简单看代码可能有点迷,下面是解释:
首先我们执行完上面两段后,先把网络结构打印出来,进行对照查看。(该段仅方便理解,非实验所必须)
python
# 创建 UNetGenerator 实例
model = UNetGenerator(in_planes=3, out_planes=3, ngf=64, n_layers=8, norm_mode='bn', dropout=False)
# 打印网络结构
print(model)执行完我们可以看到这么一大堆东西,为便于阅读,此处把它粘贴到vscode里面进行查看
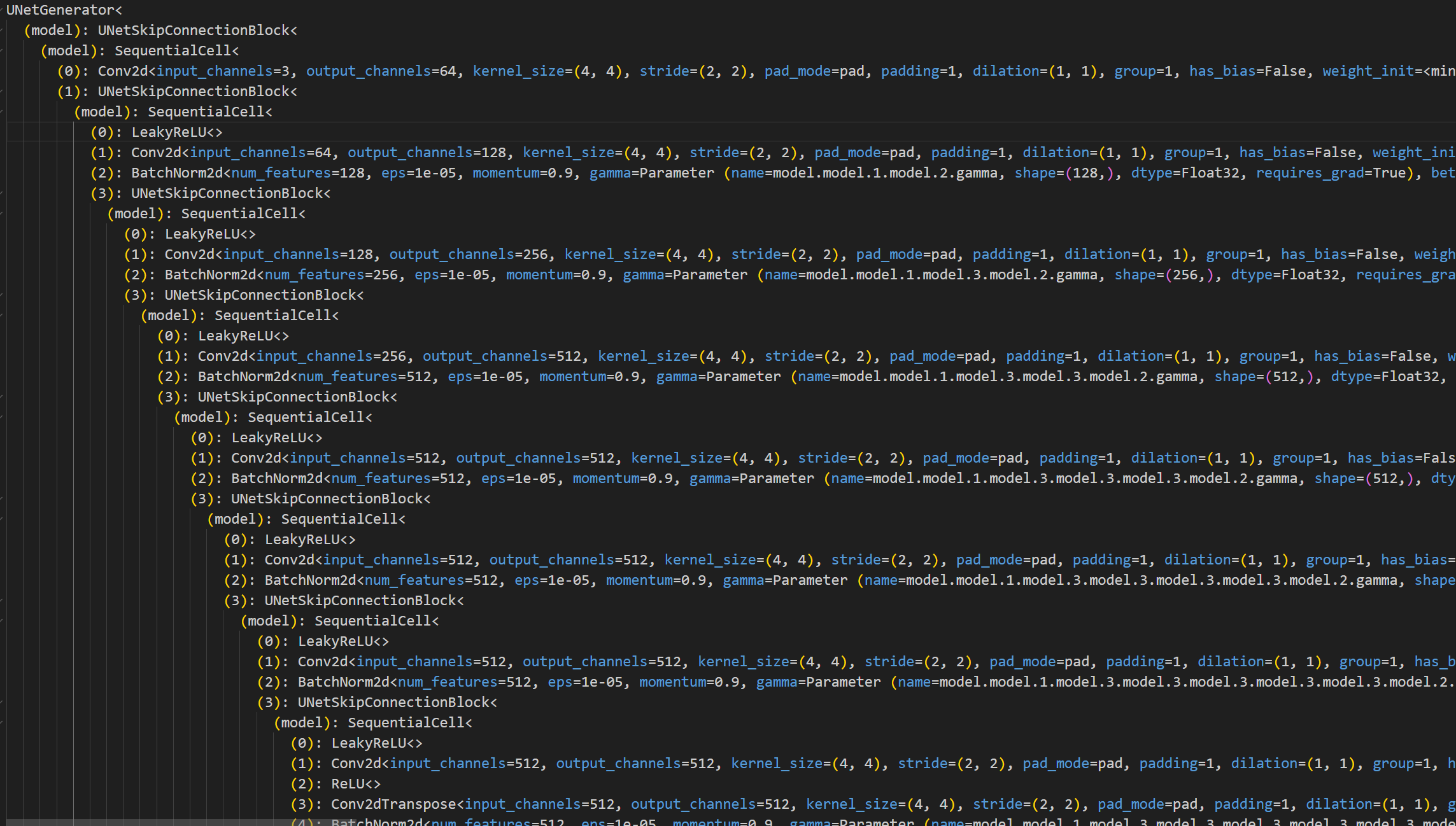
其实粘贴进来我们就大概可以看到端倪了,在notebook中没有高亮,对齐也没有那么易于阅读,所以可能不太好看。
我们定位到最里层,也就是这里
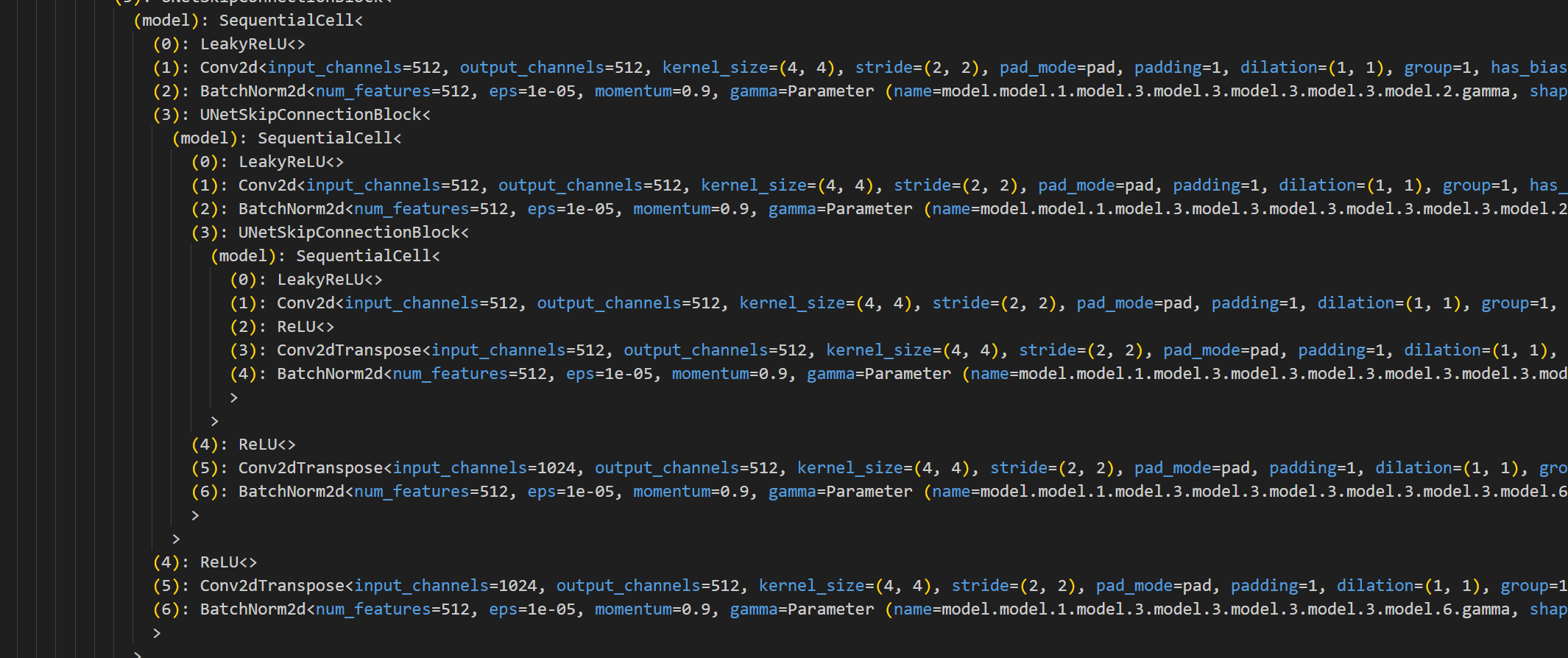
就可以大概看出来,他确实是类似于U-Net的对称结构,我们先从最里层开始对照代码查看
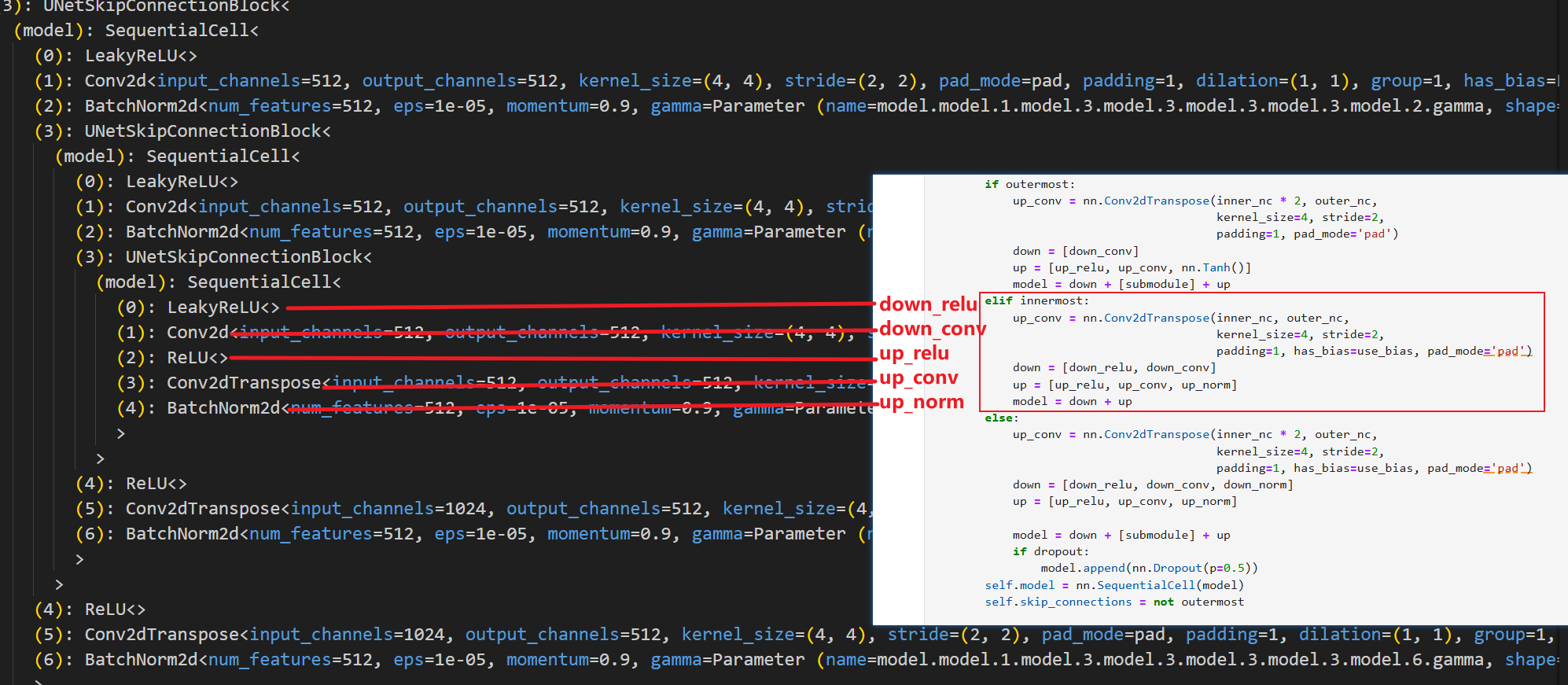
然后开始其他层(除了内层和外层之外的层,代码中也是仅做了这三种区分),我们以次里层为例
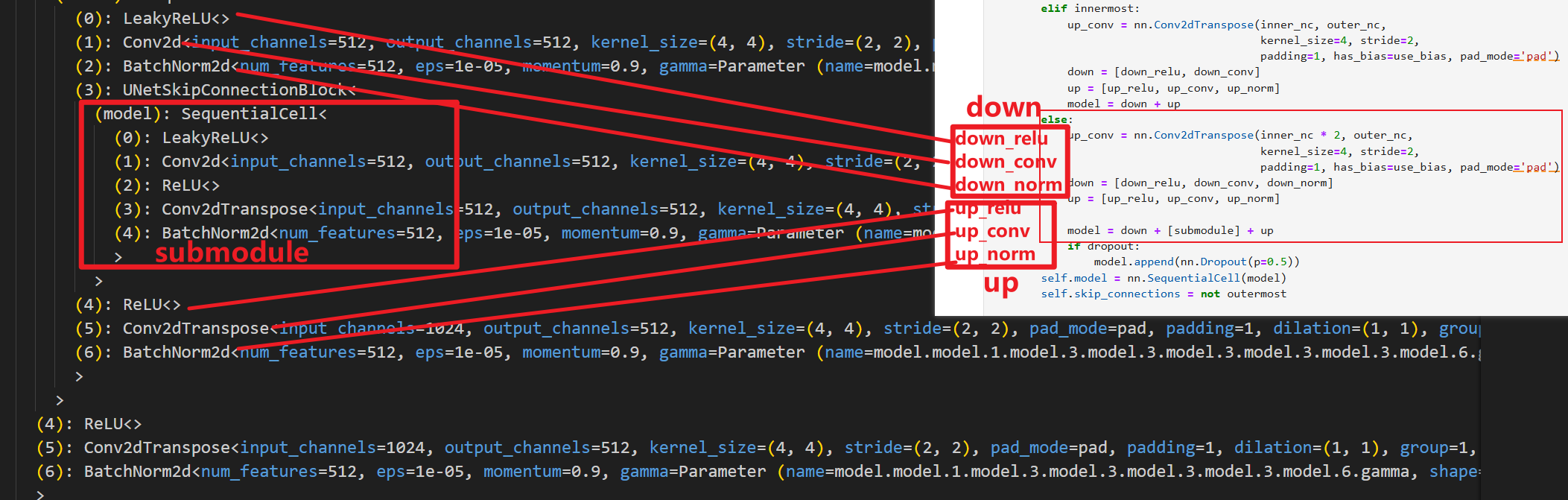
次里层就是把最里层作为子层进行嵌套,其余非最外层的层同理,都是把上一层作为子层进行嵌套(如果类比U-Net的图,可以理解为是把下一层进行嵌套,原理一样,叫法不同而已),然后看最外层
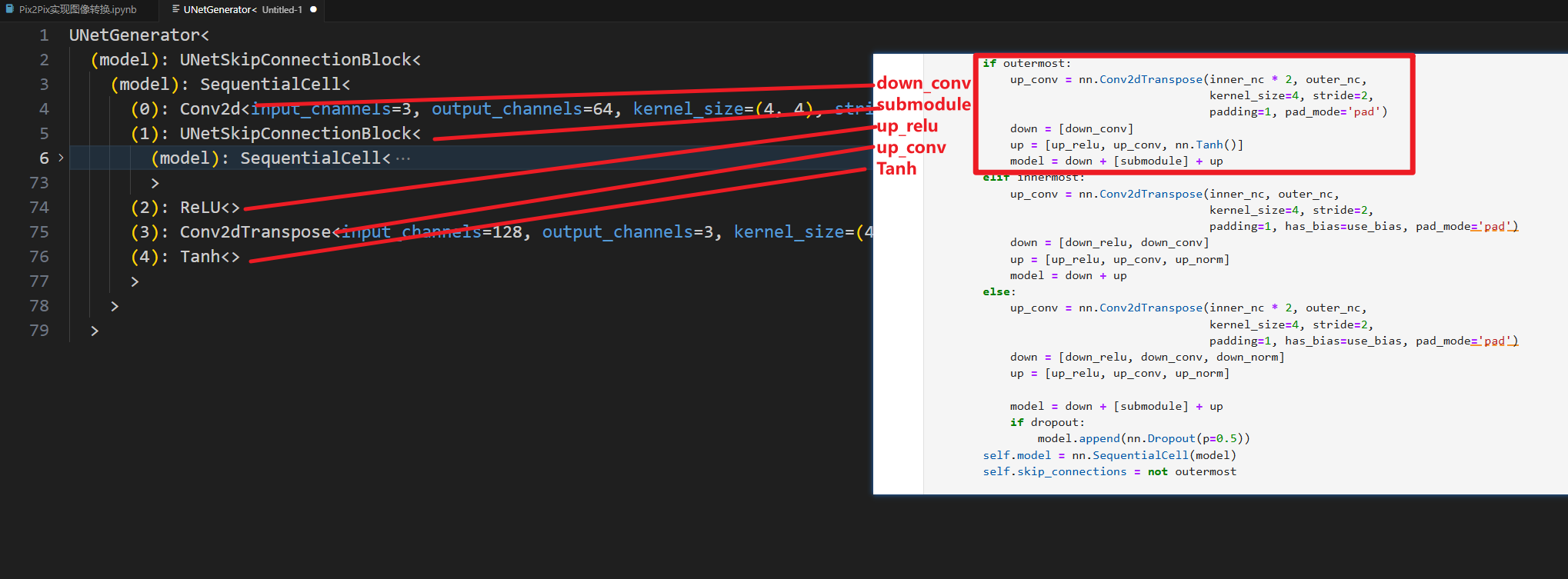
中间的层数是被我隐藏掉了。
整体看完之后就可以通透的理解了,这个U-Net结构是分层直接进行代码定义(不分左右,采用嵌套结构),不知道你们是不是哈,我入门U-Net的时候看的代码是分左右部分对每一层分别定义,所以对这部分理解有些许困难,如有大佬请直接忽略上面这部分赘述。
判别器
判别器使用的PatchGAN结构,可看做卷积。生成的矩阵中的每个点代表原图的一小块区域(patch)。通过矩阵中的各个值来判断原图中对应每个Patch的真假。
python
import mindspore.nn as nn
class ConvNormRelu(nn.Cell):
"""
一个表示卷积、归一化和ReLU层块的类。
参数:
in_planes (int): 输入图像的通道数。
out_planes (int): 输出图像的通道数。
kernel_size (int): 卷积核大小,默认为4。
stride (int): 卷积步长,默认为2。
alpha (float): LeakyReLU的负斜率,默认为0.2。
norm_mode (str): 归一化模式,可以是'batch'或'instance',默认为'batch'。
pad_mode (str): 填充模式,可以是'CONSTANT'、'reflect'等,默认为'CONSTANT'。
use_relu (bool): 是否使用ReLU激活,默认为True。
padding (int): 填充大小。如果为None,则使用默认填充,默认为None。
"""
def __init__(self,
in_planes,
out_planes,
kernel_size=4,
stride=2,
alpha=0.2,
norm_mode='batch',
pad_mode='CONSTANT',
use_relu=True,
padding=None):
super(ConvNormRelu, self).__init__()
# 根据norm_mode选择归一化层
norm = nn.BatchNorm2d(out_planes)
if norm_mode == 'instance':
norm = nn.BatchNorm2d(out_planes, affine=False)
# 根据归一化模式确定卷积层是否有偏置
has_bias = (norm_mode == 'instance')
# 确定填充大小
if not padding:
padding = (kernel_size - 1) // 2
# 构建卷积层和归一化层
if pad_mode == 'CONSTANT':
conv = nn.Conv2d(in_planes, out_planes, kernel_size, stride, pad_mode='pad',
has_bias=has_bias, padding=padding)
layers = [conv, norm]
else:
paddings = ((0, 0), (0, 0), (padding, padding), (padding, padding))
pad = nn.Pad(paddings=paddings, mode=pad_mode)
conv = nn.Conv2d(in_planes, out_planes, kernel_size, stride, pad_mode='pad', has_bias=has_bias)
layers = [pad, conv, norm]
# 如果需要,添加ReLU层
if use_relu:
relu = nn.ReLU()
if alpha > 0:
relu = nn.LeakyReLU(alpha)
layers.append(relu)
self.features = nn.SequentialCell(layers)
def construct(self, x):
"""
ConvNormRelu块的前向计算。
参数:
x (Tensor): 输入张量。
返回:
Tensor: 经过卷积、归一化和激活后的输出张量。
"""
output = self.features(x)
return output
class Discriminator(nn.Cell):
"""
判别网络类。
参数:
in_planes (int): 输入图像的通道数,默认为3。
ndf (int): 第一层的滤波器数量,默认为64。
n_layers (int): 卷积层数,默认为3。
alpha (float): LeakyReLU的负斜率,默认为0.2。
norm_mode (str): 归一化模式,可以是'batch'或'instance',默认为'batch'。
"""
def __init__(self, in_planes=3, ndf=64, n_layers=3, alpha=0.2, norm_mode='batch'):
super(Discriminator, self).__init__()
kernel_size = 4
# 第一层:卷积 + LeakyReLU
layers = [
nn.Conv2d(in_planes, ndf, kernel_size, 2, pad_mode='pad', padding=1),
nn.LeakyReLU(alpha)
]
# 中间层:卷积 + 归一化 + LeakyReLU
nf_mult = ndf
for i in range(1, n_layers):
nf_mult_prev = nf_mult
nf_mult = min(2 ** i, 8) * ndf
layers.append(ConvNormRelu(nf_mult_prev, nf_mult, kernel_size, 2, alpha, norm_mode, padding=1))
# 最后一层:卷积(无激活函数)
layers.append(nn.Conv2d(nf_mult, 1, kernel_size, 1, pad_mode='pad', padding=1))
self.features = nn.SequentialCell(layers)
def construct(self, x, y):
"""
判别网络的前向计算。
参数:
x (Tensor): 真实或生成的图像张量。
y (Tensor): 条件图像张量。
返回:
Tensor: 经过判别网络前向计算后的输出张量。
"""
x_y = ops.concat((x, y), axis=1)
output = self.features(x_y)
return output判别器的代码相对来说没有生成器那么绕,但是变量名稍微有点混,我们也可以把结构打印出来对照查看,这里自行对照。笔者仅提供代码。
python
# 创建 UNetGenerator 实例
model = Discriminator(in_planes=3, ndf=64, n_layers=3, norm_mode='batch')
# 打印网络结构
print(model)Pix2Pix的生成器和判别器初始化
python
# 导入MindSpore的神经网络模块和初始化方法
import mindspore.nn as nn
from mindspore.common import initializer as init
# 定义生成器的输入和输出通道数
g_in_planes = 3
g_out_planes = 3
# 定义生成器的特征数和卷积层数
g_ngf = 64
g_layers = 8
# 定义判别器的输入通道数和特征数
d_in_planes = 6
d_ndf = 64
# 定义判别器的卷积层数和LeakyReLU的负斜率系数
d_layers = 3
alpha = 0.2
# 定义模型参数的初始化方法和增益值
init_gain = 0.02
init_type = 'normal'
# 初始化生成器网络,并根据指定的初始化类型对生成器的参数进行初始化
net_generator = UNetGenerator(in_planes=g_in_planes, out_planes=g_out_planes,
ngf=g_ngf, n_layers=g_layers)
# 遍历生成器网络的所有可训练的块及其名称
for _, cell in net_generator.cells_and_names():
# 判断当前单元是否为卷积层或卷积转置层
if isinstance(cell, (nn.Conv2d, nn.Conv2dTranspose)):
# 根据指定的初始化类型对卷积层的权重进行初始化
if init_type == 'normal':
cell.weight.set_data(init.initializer(init.Normal(init_gain), cell.weight.shape))
elif init_type == 'xavier':
cell.weight.set_data(init.initializer(init.XavierUniform(init_gain), cell.weight.shape))
elif init_type == 'constant':
cell.weight.set_data(init.initializer(0.001, cell.weight.shape))
else:
raise NotImplementedError('initialization method [%s] is not implemented' % init_type)
# 判断当前单元是否为批归一化层
elif isinstance(cell, nn.BatchNorm2d):
# 对批归一化层的gamma参数和beta参数进行初始化
cell.gamma.set_data(init.initializer('ones', cell.gamma.shape))
cell.beta.set_data(init.initializer('zeros', cell.beta.shape))
# 初始化判别器网络,并根据指定的初始化类型对判别器的参数进行初始化
net_discriminator = Discriminator(in_planes=d_in_planes, ndf=d_ndf,
alpha=alpha, n_layers=d_layers)
for _, cell in net_discriminator.cells_and_names():
if isinstance(cell, (nn.Conv2d, nn.Conv2dTranspose)):
if init_type == 'normal':
cell.weight.set_data(init.initializer(init.Normal(init_gain), cell.weight.shape))
elif init_type == 'xavier':
cell.weight.set_data(init.initializer(init.XavierUniform(init_gain), cell.weight.shape))
elif init_type == 'constant':
cell.weight.set_data(init.initializer(0.001, cell.weight.shape))
else:
raise NotImplementedError('initialization method [%s] is not implemented' % init_type)
elif isinstance(cell, nn.BatchNorm2d):
cell.gamma.set_data(init.initializer('ones', cell.gamma.shape))
cell.beta.set_data(init.initializer('zeros', cell.beta.shape))
# 定义Pix2Pix模型类,整合生成器和判别器
class Pix2Pix(nn.Cell):
"""Pix2Pix模型网络"""
def __init__(self, discriminator, generator):
super(Pix2Pix, self).__init__(auto_prefix=True)
# 初始化判别器和生成器网络
self.net_discriminator = discriminator
self.net_generator = generator
def construct(self, reala):
# 通过生成器网络生成假的输出
fakeb = self.net_generator(reala)
return fakeb训练
训练分为两个主要部分:训练判别器和训练生成器。训练判别器的目的是最大程度地提高判别图像真伪的概率。训练生成器是希望能产生更好的虚假图像。在这两个部分中,分别获取训练过程中的损失,并在每个周期结束时进行统计。
python
# 使用%%time魔术命令来测量代码块的执行时间
import numpy as np # 引入numpy库用于数值计算
import os # 引入os库用于操作系统相关功能
import datetime # 引入datetime库用于处理日期和时间
from mindspore import value_and_grad, Tensor # 从mindspore库中引入梯度计算和Tensor对象
# 定义训练轮次、检查点目录、数据集大小、验证图片大小、学习率、训练和衰减周期等超参数
epoch_num = 3
ckpt_dir = "results/ckpt"
dataset_size = 400
val_pic_size = 256
lr = 0.0002
n_epochs = 100
n_epochs_decay = 100
# 定义函数以获取学习率列表
def get_lr():
# 初始化学习率列表
lrs = [lr] * dataset_size * n_epochs
lr_epoch = 0
# 逐步衰减学习率
for epoch in range(n_epochs_decay):
lr_epoch = lr * (n_epochs_decay - epoch) / n_epochs_decay
lrs += [lr_epoch] * dataset_size
lrs += [lr_epoch] * dataset_size * (epoch_num - n_epochs_decay - n_epochs)
return Tensor(np.array(lrs).astype(np.float32)) # 返回学习率Tensor
# 加载数据集
dataset = ds.MindDataset("./dataset/dataset_pix2pix/train.mindrecord", columns_list=["input_images", "target_images"], shuffle=True, num_parallel_workers=1)
steps_per_epoch = dataset.get_dataset_size() # 获取每个epoch的步骤数
loss_f = nn.BCEWithLogitsLoss() # 定义二分类损失函数
l1_loss = nn.L1Loss() # 定义L1损失函数
# 定义判别器前向计算函数
def forword_dis(reala, realb):
lambda_dis = 0.5 # 判别器损失权重
fakeb = net_generator(reala) # 生成假图像
pred0 = net_discriminator(reala, fakeb) # 判别器对假图像的预测
pred1 = net_discriminator(reala, realb) # 判别器对真图像的预测
loss_d = loss_f(pred1, ops.ones_like(pred1)) + loss_f(pred0, ops.zeros_like(pred0)) # 计算判别器损失
loss_dis = loss_d * lambda_dis # 加权判别器损失
return loss_dis
# 定义生成器前向计算函数
def forword_gan(reala, realb):
lambda_gan = 0.5 # 生成对抗损失权重
lambda_l1 = 100 # L1损失权重
fakeb = net_generator(reala) # 生成假图像
pred0 = net_discriminator(reala, fakeb) # 判别器对假图像的预测
loss_1 = loss_f(pred0, ops.ones_like(pred0)) # 计算对抗损失
loss_2 = l1_loss(fakeb, realb) # 计算L1损失
loss_gan = loss_1 * lambda_gan + loss_2 * lambda_l1 # 总生成器损失
return loss_gan
# 初始化优化器
d_opt = nn.Adam(net_discriminator.trainable_params(), learning_rate=get_lr(), beta1=0.5, beta2=0.999, loss_scale=1)
g_opt = nn.Adam(net_generator.trainable_params(), learning_rate=get_lr(), beta1=0.5, beta2=0.999, loss_scale=1)
# 准备梯度计算函数
grad_d = value_and_grad(forword_dis, None, net_discriminator.trainable_params())
grad_g = value_and_grad(forword_gan, None, net_generator.trainable_params())
# 定义训练步函数
def train_step(reala, realb):
loss_dis, d_grads = grad_d(reala, realb) # 计算判别器损失和梯度
loss_gan, g_grads = grad_g(reala, realb) # 计算生成器损失和梯度
d_opt(d_grads) # 更新判别器参数
g_opt(g_grads) # 更新生成器参数
return loss_dis, loss_gan # 返回损失值
# 确保检查点目录存在
if not os.path.isdir(ckpt_dir):
os.makedirs(ckpt_dir)
# 初始化损失列表
g_losses = []
d_losses = []
data_loader = dataset.create_dict_iterator(output_numpy=True, num_epochs=epoch_num) # 创建数据加载器
# 开始训练循环
for epoch in range(epoch_num):
for i, data in enumerate(data_loader):
start_time = datetime.datetime.now() # 记录开始时间
input_image = Tensor(data["input_images"]) # 输入图像
target_image = Tensor(data["target_images"]) # 目标图像
dis_loss, gen_loss = train_step(input_image, target_image) # 执行训练步
end_time = datetime.datetime.now() # 记录结束时间
delta = (end_time - start_time).microseconds # 计算步骤时间
# 打印训练进度和损失信息
if i % 2 == 0:
print("ms per step:{:.2f} epoch:{}/{} step:{}/{} Dloss:{:.4f} Gloss:{:.4f} ".format((delta / 1000), (epoch + 1), (epoch_num), i, steps_per_epoch, float(dis_loss), float(gen_loss)))
d_losses.append(dis_loss.asnumpy()) # 记录判别器损失
g_losses.append(gen_loss.asnumpy()) # 记录生成器损失
# 保存检查点
if (epoch + 1) == epoch_num:
mindspore.save_checkpoint(net_generator, ckpt_dir + "Generator.ckpt")推理
获取上述训练过程完成后的ckpt文件,通过load_checkpoint和load_param_into_net将ckpt中的权重参数导入到模型中,获取数据进行推理并对推理的效果图进行演示(由于时间问题,训练过程只进行了3个epoch,可根据需求调整epoch)。
python
# 导入MindSpore的checkpoint加载函数
from mindspore import load_checkpoint, load_param_into_net
# 加载生成器的参数
param_g = load_checkpoint(ckpt_dir + "Generator.ckpt")
# 将加载的参数应用到生成器网络中
load_param_into_net(net_generator, param_g)
# 加载训练数据集,包括输入图像和目标图像,并开启数据混洗以增强模型泛化能力
dataset = ds.MindDataset("./dataset/dataset_pix2pix/train.mindrecord", columns_list=["input_images", "target_images"], shuffle=True)
# 获取数据迭代器中的第一个批次的数据
data_iter = next(dataset.create_dict_iterator())
# 使用生成器网络对输入图像进行前向传播,得到预测结果
predict_show = net_generator(data_iter["input_images"])
# 初始化一个图形界面用于展示输入图像和生成的图像
plt.figure(figsize=(10, 3), dpi=140)
for i in range(10):
# 绘制输入图像
plt.subplot(2, 10, i + 1)
plt.imshow((data_iter["input_images"][i].asnumpy().transpose(1, 2, 0) + 1) / 2)
plt.axis("off")
plt.subplots_adjust(wspace=0.05, hspace=0.02)
# 绘制生成的图像
plt.subplot(2, 10, i + 11)
plt.imshow((predict_show[i].asnumpy().transpose(1, 2, 0) + 1) / 2)
plt.axis("off")
plt.subplots_adjust(wspace=0.05, hspace=0.02)
# 显示所有图像
plt.show()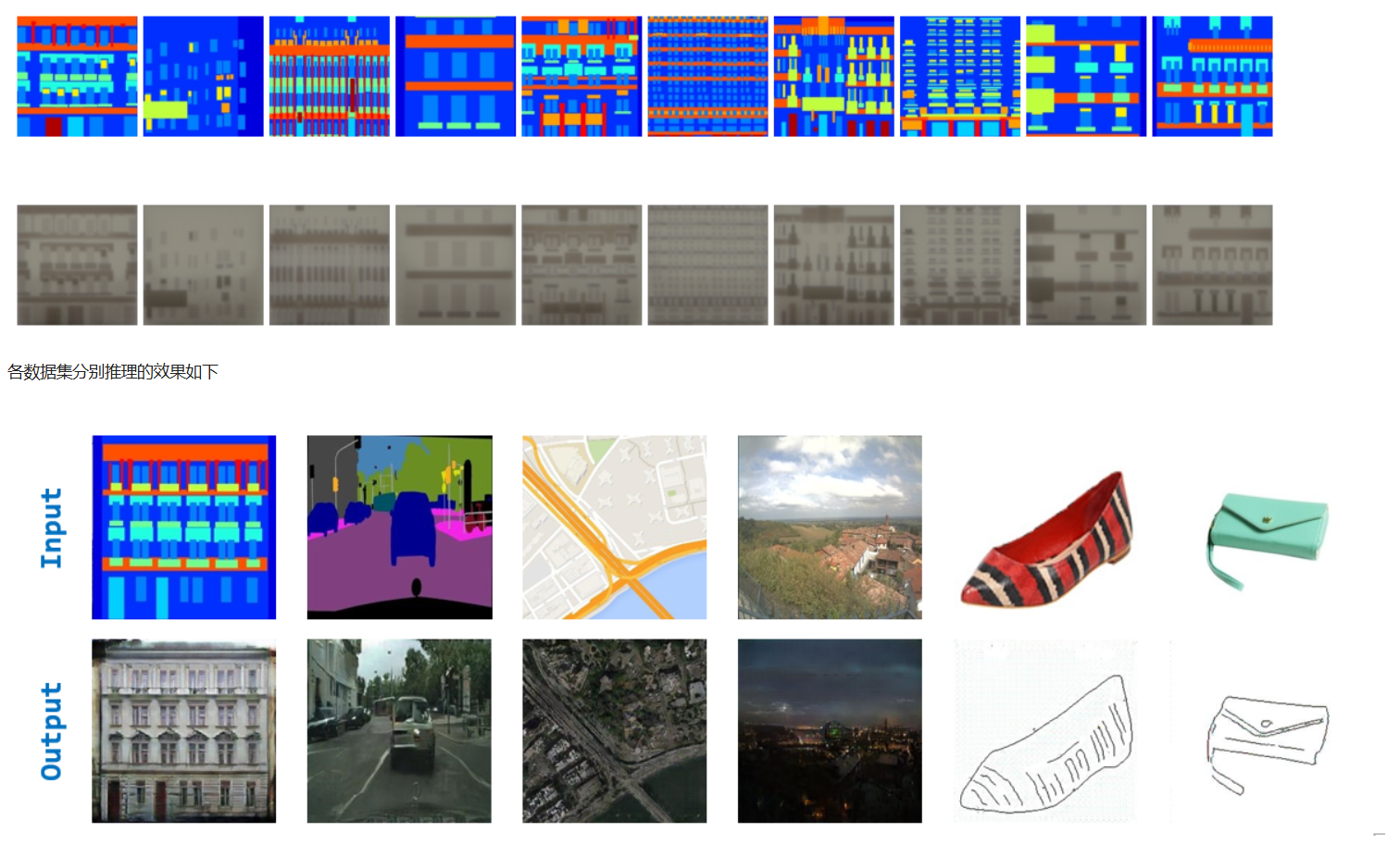
参考代码:Pix2Pix实现图像转... - JupyterLab (mindspore.cn)
参考资料: