超级简单的串口使用
- 前言
- 零、检查准备(可略)
-
- [0.1 查看UART引脚:](#0.1 查看UART引脚:)
- [0.2 扩展一下引脚查看的方法](#0.2 扩展一下引脚查看的方法)
- 一、配置准备
-
- [1.1 检查端口配置](#1.1 检查端口配置)
- [1.2 查看串口映射](#1.2 查看串口映射)
- [1.3 下载minicom串口调试工具](#1.3 下载minicom串口调试工具)
- [1.4 通过命令获取串口上的数据](#1.4 通过命令获取串口上的数据)
- 二、python的serial进行收发测试
- 总结
前言
先放几篇参考文献先
1、树莓派5开发经验及串口配置这篇是VIP,其实对我来说没啥参考意义。
2、树莓派5串口通信这篇到检查串口映射的时候我就跟他不一样了,因为我是有serial1的。
3、个人认为这个博主的博文比较简洁,好用的----(最新)树莓派5怎么样进行串口通信
我之前一直以为5B升级,是只保留了UART的接口,但是去网上找资料发现,其实还是能有IO串口的。所以这次就来试试效果。
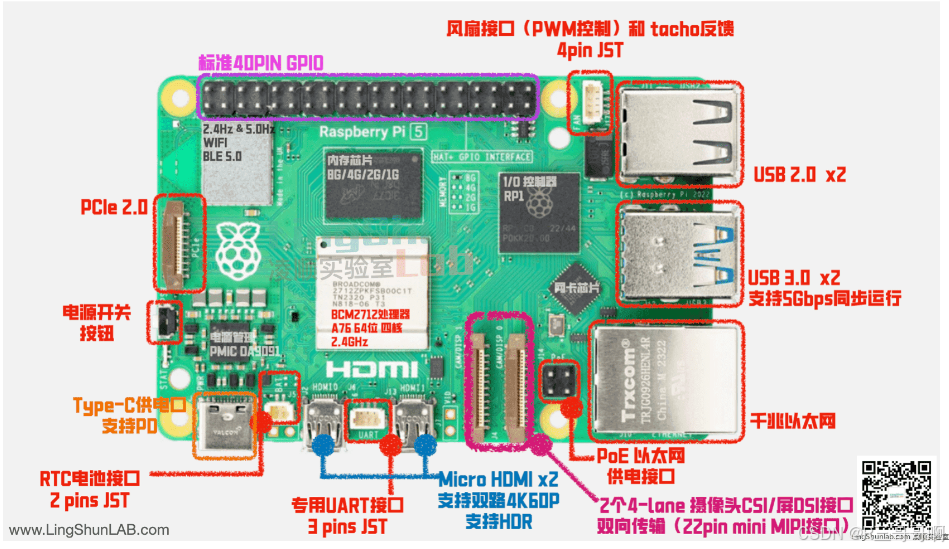
图片来源指路⇨Raspberry Pi 5(树莓派5)的最新特色和引脚大全
根据@李解49的博文引脚图

零、检查准备(可略)
0.1 查看UART引脚:
c
dtoverlay -a | grep uart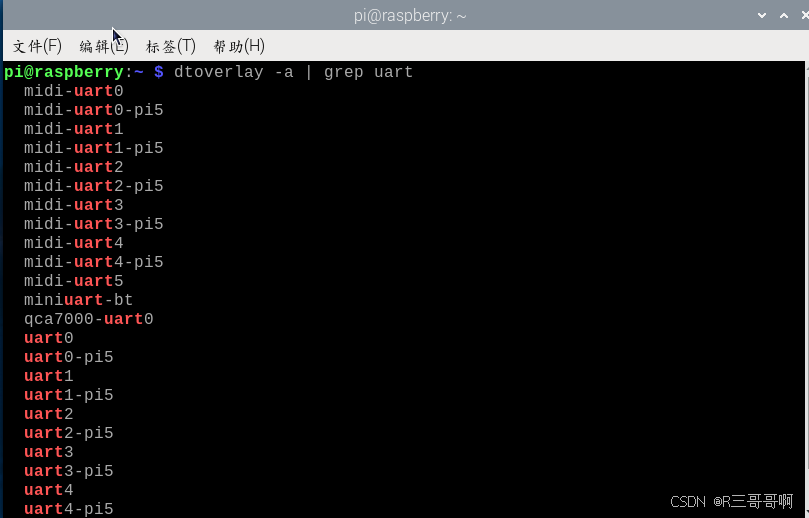
结果
c
pi@raspberry:~ $ dtoverlay -a | grep uart
midi-uart0
midi-uart0-pi5
midi-uart1
midi-uart1-pi5
midi-uart2
midi-uart2-pi5
midi-uart3
midi-uart3-pi5
midi-uart4
midi-uart4-pi5
midi-uart5
miniuart-bt
qca7000-uart0
uart0
uart0-pi5
uart1
uart1-pi5
uart2
uart2-pi5
uart3
uart3-pi5
uart4
uart4-pi5
uart5在输出中,可以看到以下主要的 UART 接口:
uart0 和 uart0-pi5
uart1 和 uart1-pi5
uart2 和 uart2-pi5
uart3 和 uart3-pi5
uart4 和 uart4-pi5
uart5

0.2 扩展一下引脚查看的方法
查看引脚配置的方法,前提是有GPIO Zero Python包,没下载的->在树莓Pi上查看引脚配置



一、配置准备
1.1 检查端口配置
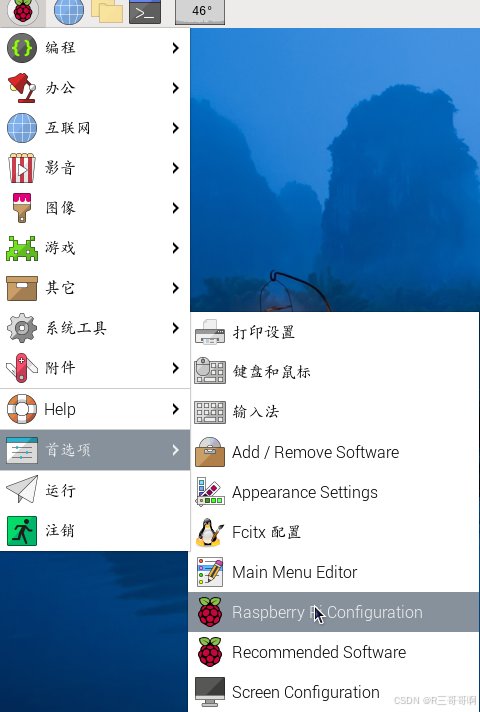
开启串口设置

开启后,确定,然后等待重启。
1.2 查看串口映射
Alt+T 迅速唤起终端
查看所有的映射
c
ls /dev -al 

我没看懂这里,后来查阅了资料。
树莓派串口分为硬件串口和mini串口,ttyAMA0是硬件串口,ttyS0是mini串口,在树莓派5以下版本硬件串口都被分配给蓝牙(serial1)使用,在进行串口通信时候需要修改映射关系,将硬件串口映射到GPIO引脚上(serial0)
这个也就是我之前用3B的时候,需要关闭蓝牙的配置然后改变串口映射去开启ttyyMA0的原因。
但
Raspberry Pi 5没有mini UART。
关于这几个串口的解释如下。。。

上述这么多资料,好像就是说,我这个ttyAMA0可以直接被使用。
1.3 下载minicom串口调试工具
c
sudo apt-get install minicom安装好之后,硬件连接,我这里是使用电脑端的串口调试助手。
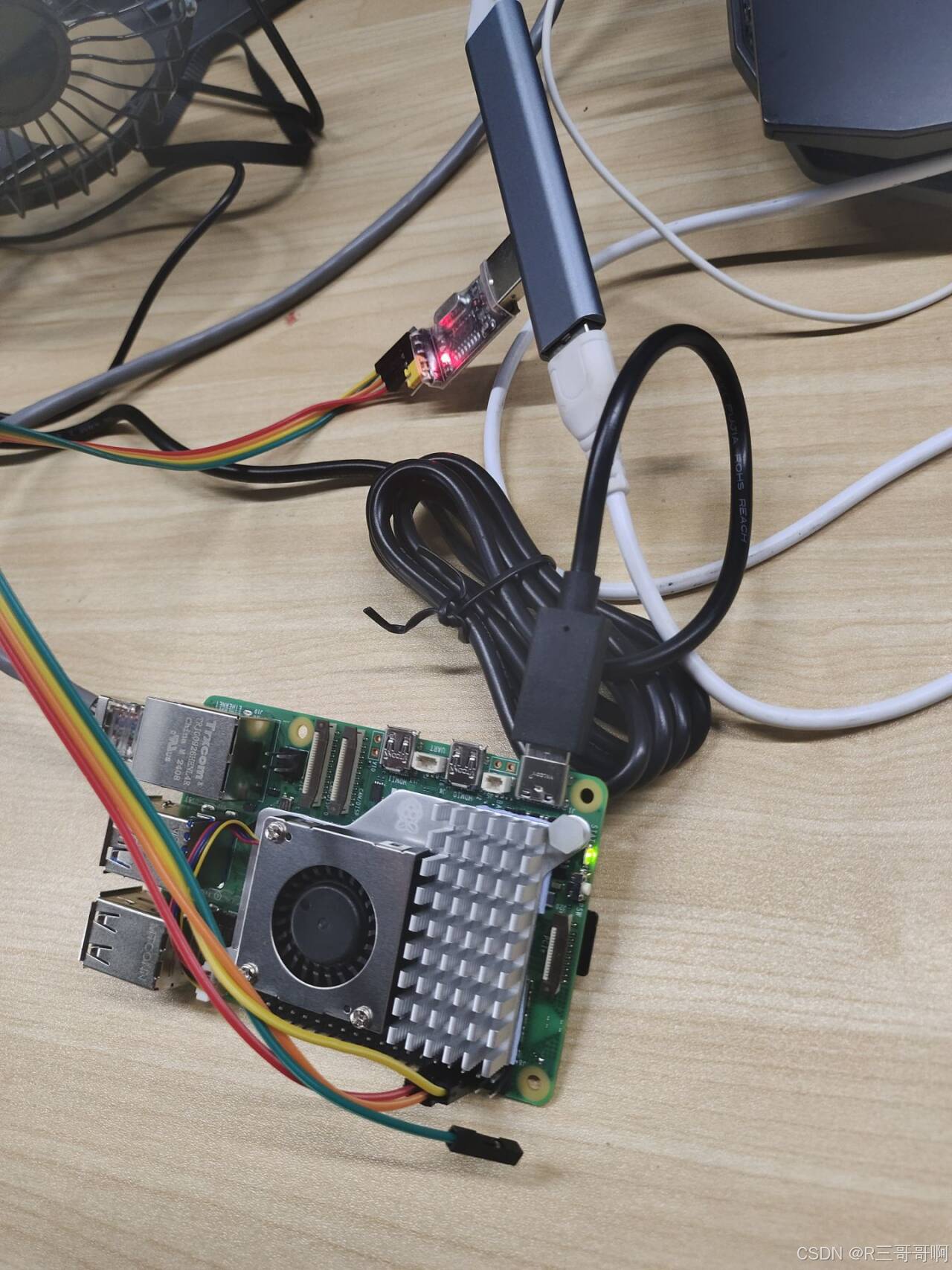
简单来说,不用接5V供电。使用UART0
然后
1.4 通过命令获取串口上的数据
其实我看其他博主是改了minicom配置文件(我评价的参考文献里面最棒的那篇博文),但是我们的主要调试工具又不是minicom,于是我就不费力去改这个了。主要是参考之前3B时候的玩法去调试
c
minicom -b 9600 -o -D /dev/ttyAMA0发

收


ok,收发正常!
二、python的serial进行收发测试
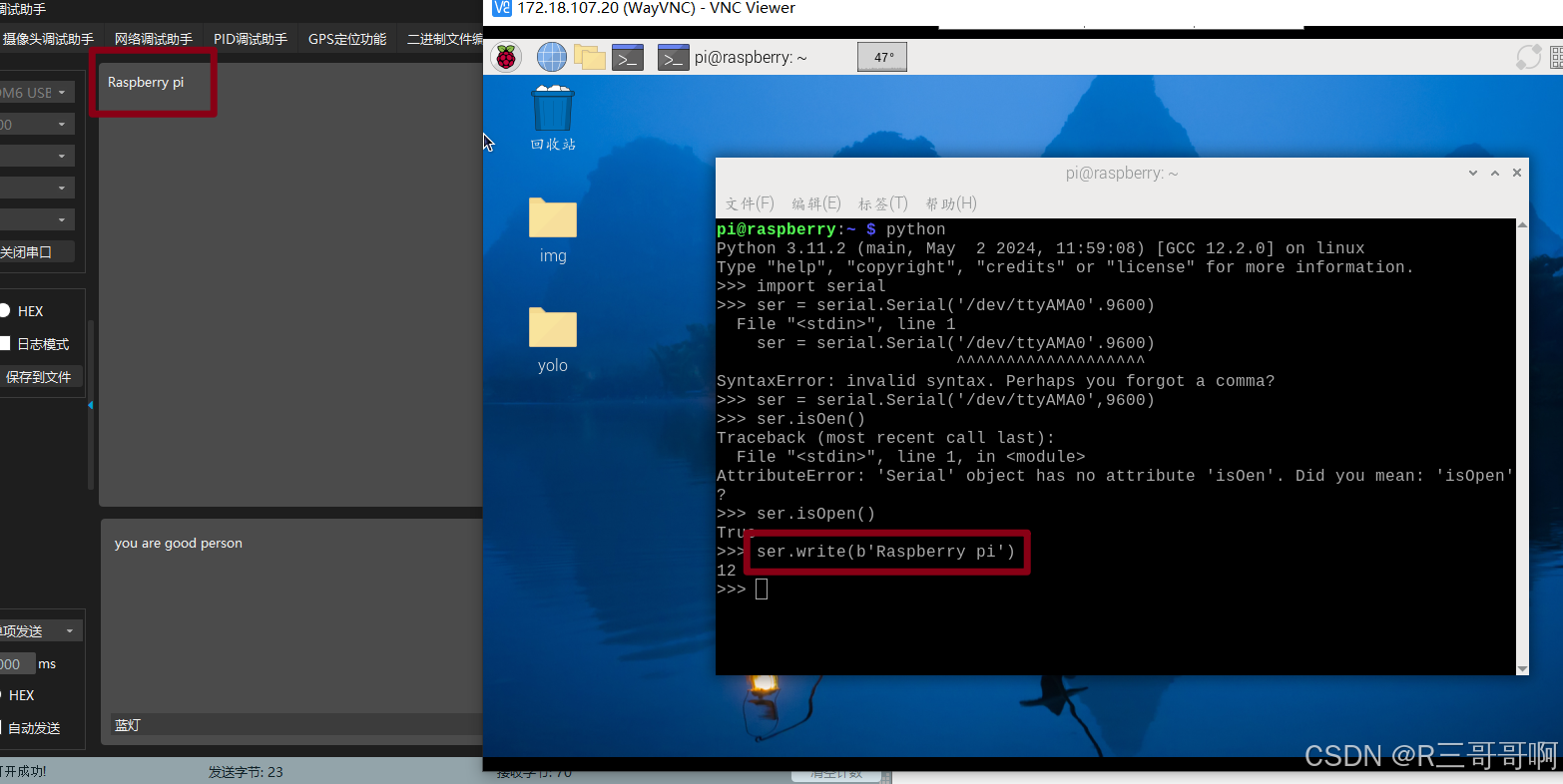
ok,一切正常。
总结
这篇文章依旧没有总结