参考:
超详细 WSL2 安装 ros 和 anaconda_wsl2安装anaconda-CSDN博客
一.安装ros
1. 更换系统源
输入
wget http://fishros.com/install -O fishros && . fishros和上面的链接一样,依次输入5-2-1
2. 安装ros
输入
wget http://fishros.com/install -O fishros && . fishros输入1-2
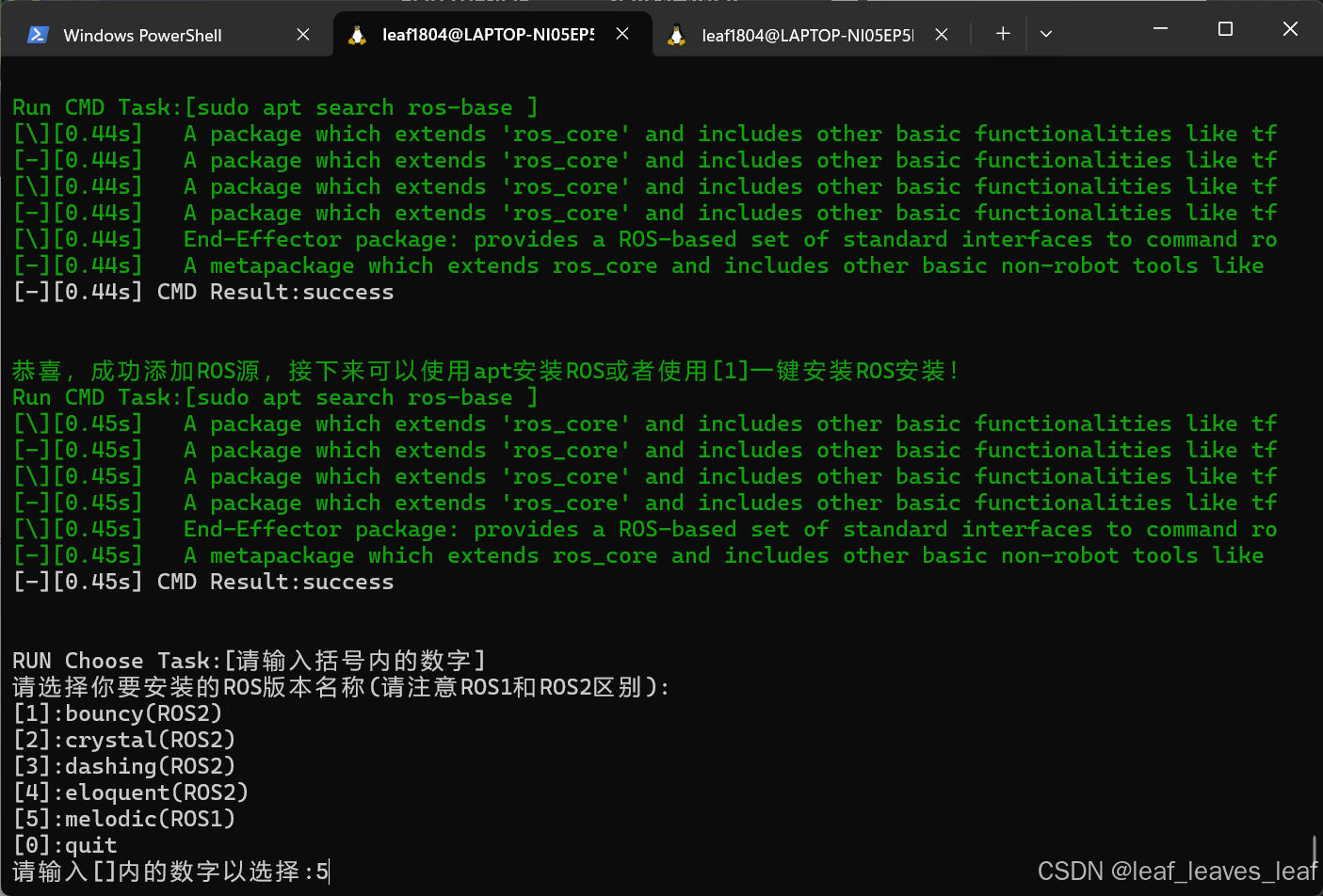
看到下面的界面,输入5
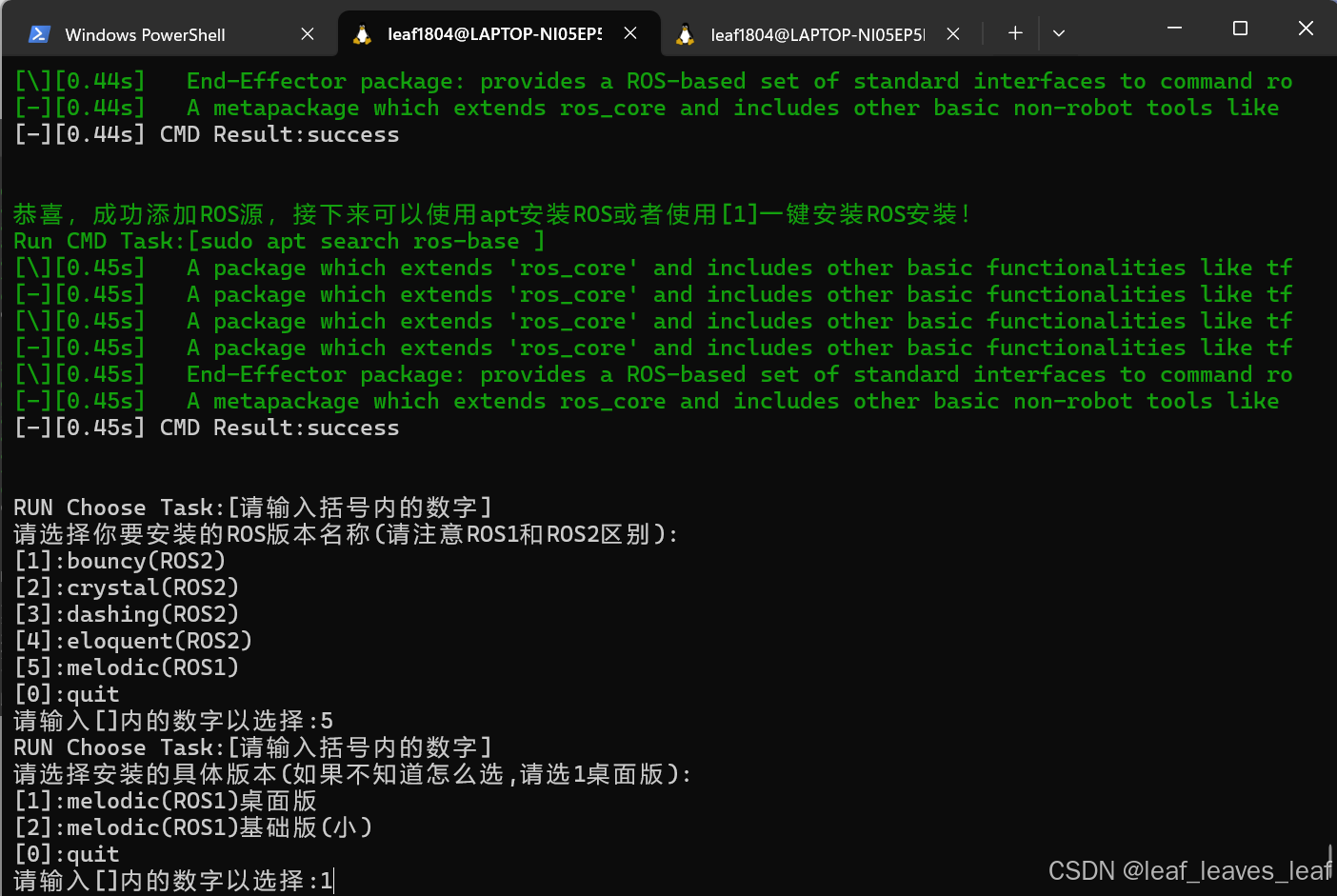
输入1
3. 小乌龟测试
4. 配置rosdep
输入
wget http://fishros.com/install -O fishros && . fishros输入3
5. 更新系统环境
输入
wget http://fishros.com/install -O fishros && . fishros输入4
运行gazebo的时候报错
gazebo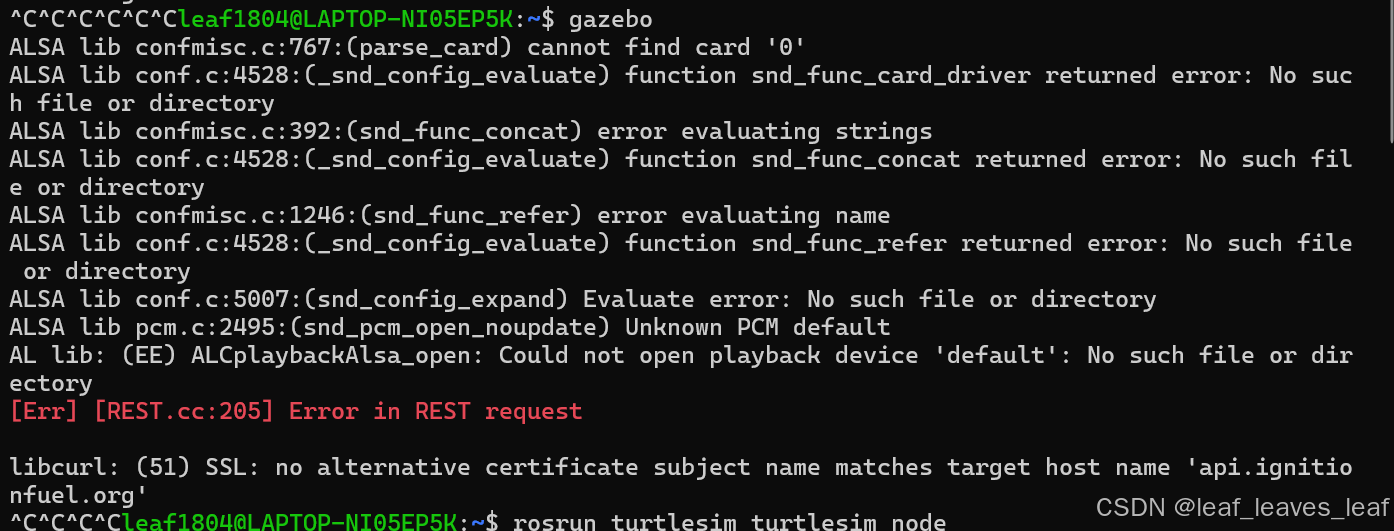
解决办法
打开编辑~/.ignition/fuel/config.yaml文件
sudo gedit ~/.ignition/fuel/config.yaml首先注释 url : https://api.ignitionfuel.org
然后添加 url: https://api.ignitionrobotics.org
servers:
-
name: osrf
url: https://api.ignitionrobotics.org
# url: https://api.ignitionfuel.org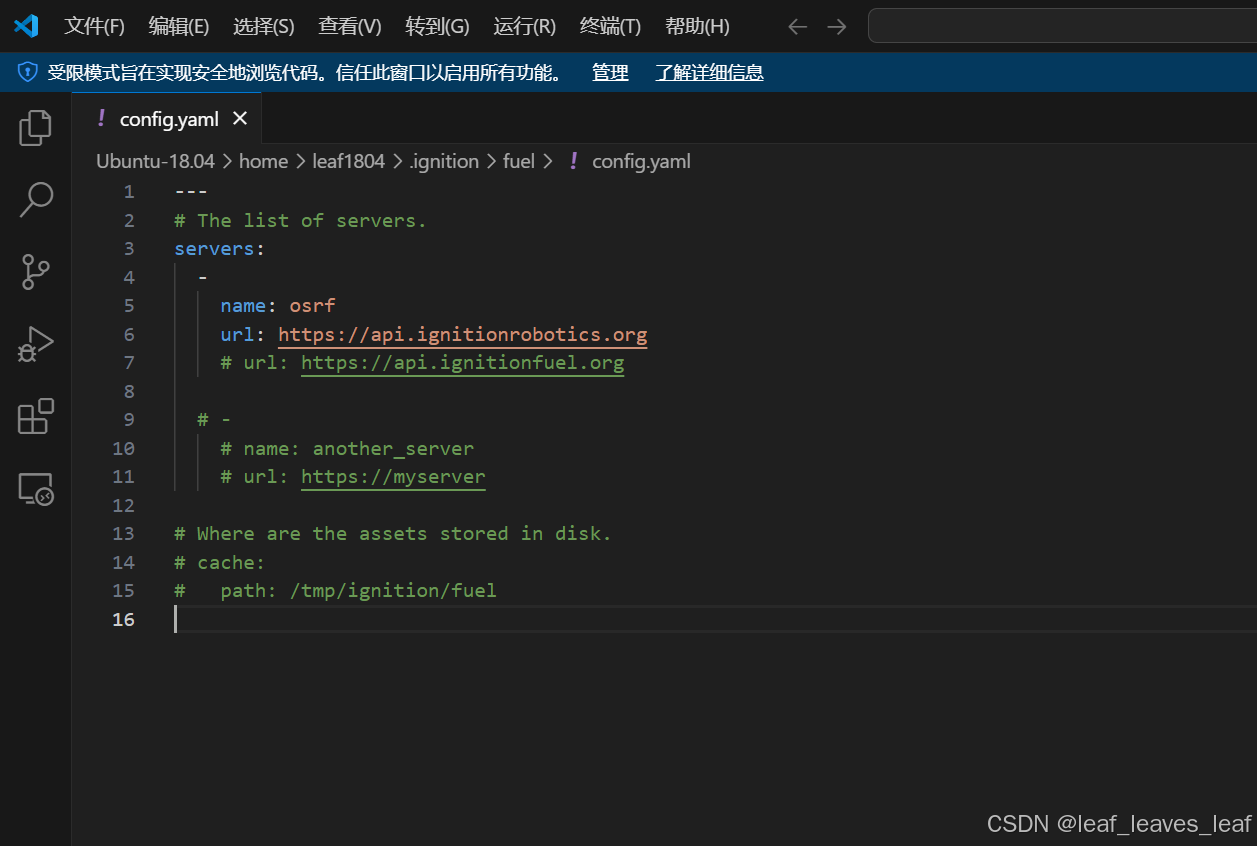
再次运行gazebo 就不会报错了
二.安装anaconda
下面的步骤都完全参考: