智能扫地机器人系统方案设计
一、引言
随着人们生活节奏的加快和对生活品质的追求,智能家居产品越来越受到消费者的青睐。智能扫地机器人作为一种能够自动清扫地面的智能设备,为人们节省了大量的时间和精力。本方案旨在设计一款功能强大、智能化程度高、清洁效果好的智能扫地机器人系统。
二、系统概述
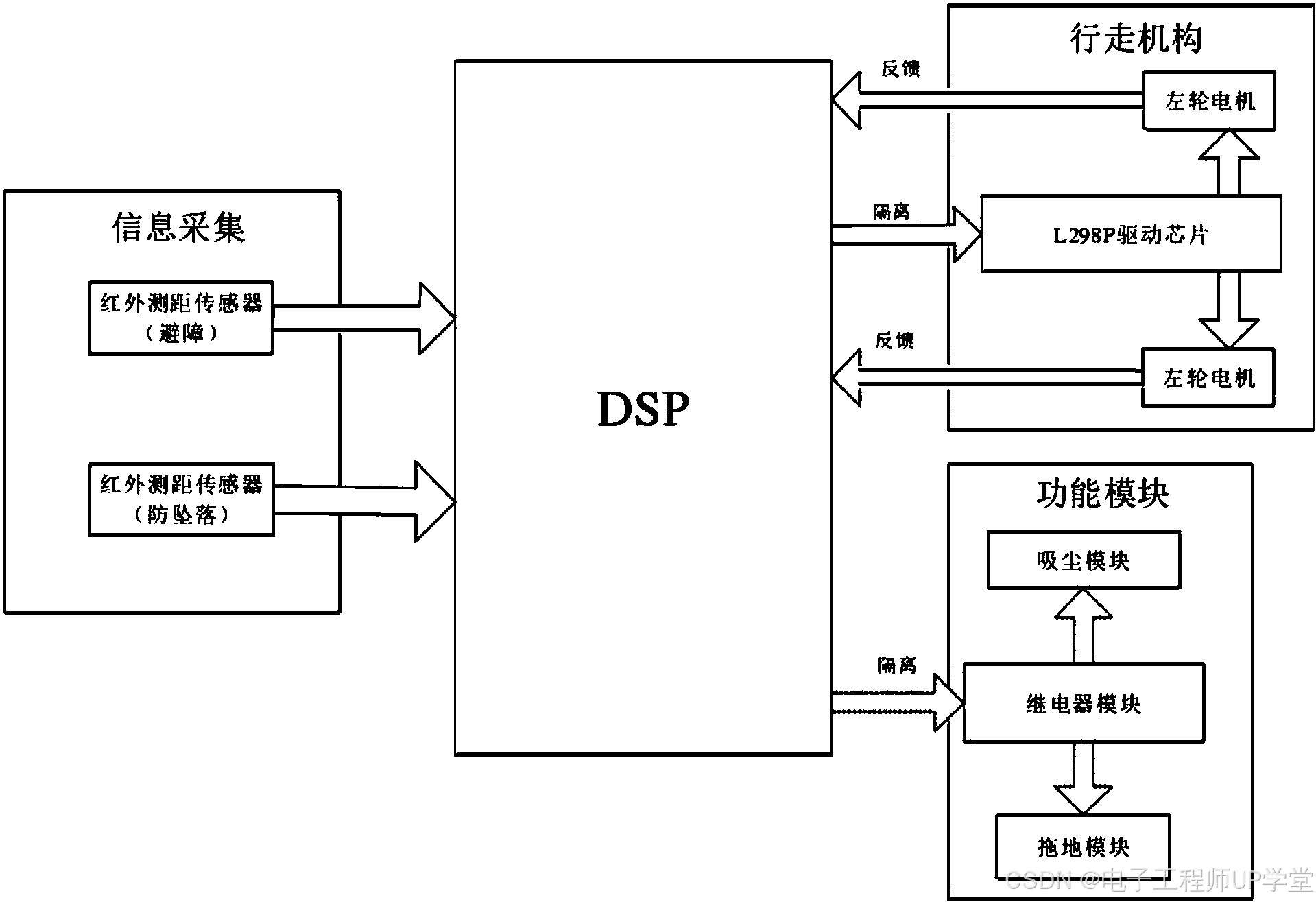
智能扫地机器人是一种能够自主移动、规划清扫路径、识别障碍物并完成清扫任务的智能设备。它通常由机械结构、传感器系统、控制系统、驱动系统、清扫系统和电源系统等部分组成。
三、机械结构设计
(一)外形设计
智能扫地机器人的外形通常为圆形或方形,以方便在室内自由移动。其高度应尽量低,以便能够进入家具底部进行清扫。外壳采用高强度塑料或金属材质,具有良好的耐磨损和抗冲击性能。
(二)行走机构
行走机构通常由驱动轮和万向轮组成。驱动轮负责提供动力,使机器人能够前进、后退和转弯。万向轮则用于支撑机器人的重量和调整方向。驱动轮采用橡胶材质,具有良好的抓地力和耐磨性。
(三)清扫机构
清扫机构是智能扫地机器人的核心部件之一,主要包括边刷、滚刷和吸尘口。边刷位于机器人的两侧,用于将角落和边缘的灰尘扫向吸尘口。滚刷位于机器人的底部,通过旋转将地面的灰尘和杂物卷入吸尘口。吸尘口连接着吸尘器,将吸入的灰尘和杂物收集到尘盒中。
(四)尘盒设计
尘盒用于收集清扫过程中吸入的灰尘和杂物,其容量应根据机器人的清扫面积和使用频率进行设计。尘盒通常采用可拆卸式设计,方便用户清理和更换。
四、传感器系统
(一)碰撞传感器
碰撞传感器安装在机器人的外壳上,用于检测机器人与障碍物的碰撞。当机器人碰撞到障碍物时,碰撞传感器会向控制系统发送信号,控制系统会控制机器人改变方向,避免再次碰撞。
(二)红外传感器
红外传感器用于检测机器人前方和侧面的障碍物。它通过发射红外线并接收反射回来的信号来判断障碍物的距离和位置。红外传感器具有响应速度快、精度高的特点,但检测范围相对较窄。
(三)超声波传感器
超声波传感器用于检测机器人与障碍物的距离。它通过发射超声波并接收反射回来的信号来计算障碍物的距离。超声波传感器具有检测范围广、精度高的特点,但响应速度相对较慢。
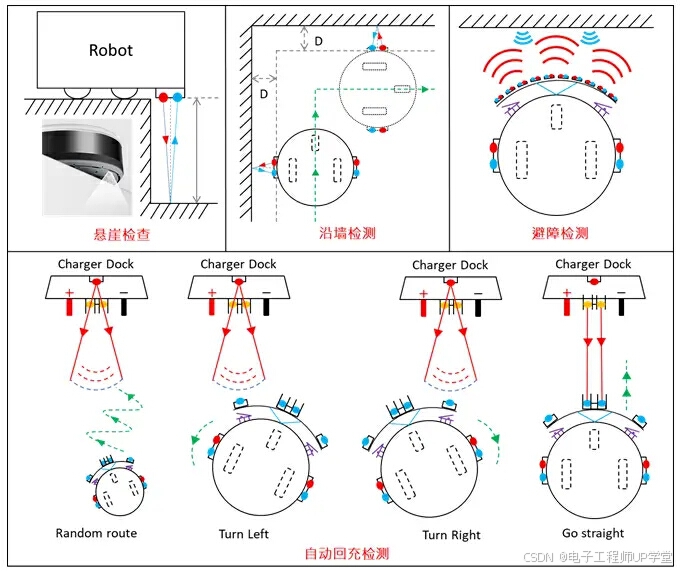
(四)悬崖传感器
悬崖传感器安装在机器人的底部,用于检测地面的落差。当机器人检测到前方地面有较大落差时,会立即停止前进,避免掉落。
(五)陀螺仪和加速度计
陀螺仪和加速度计用于检测机器人的姿态和运动状态。它们可以帮助机器人保持平衡,准确地规划清扫路径,并在遇到斜坡时调整行走速度。
(六)视觉传感器(可选)
视觉传感器可以为机器人提供更丰富的环境信息,如识别家具、房间布局等。通过图像识别技术,机器人能够更智能地规划清扫路径和避开障碍物。但视觉传感器的成本较高,且对计算能力要求较高。
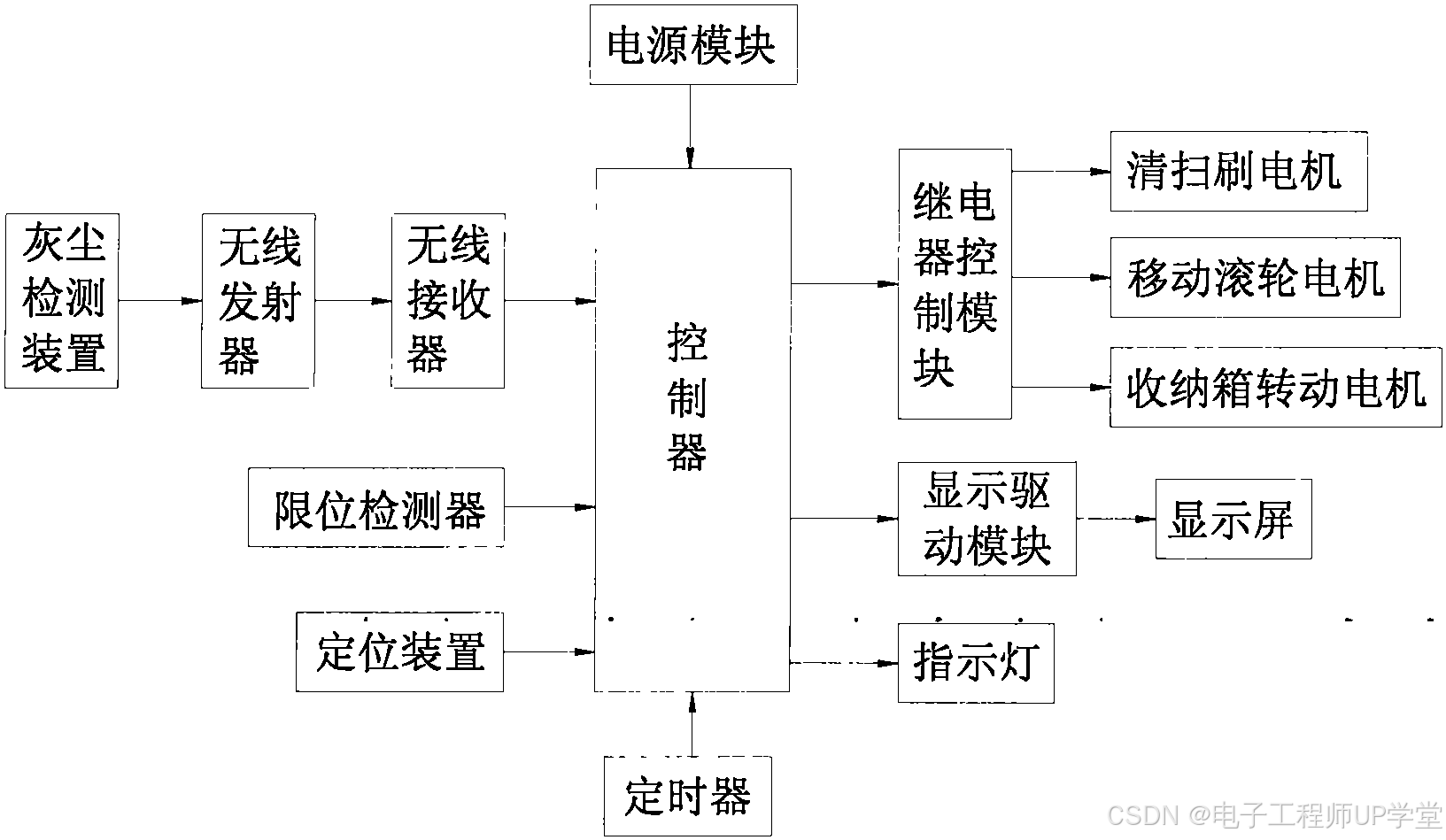
五、控制系统
(一)微控制器
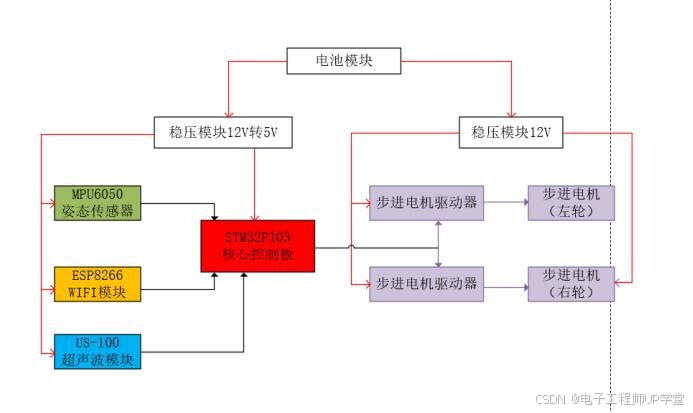
微控制器是智能扫地机器人的控制核心,负责处理传感器采集的数据、控制驱动系统和清扫系统的工作、规划清扫路径等。常用的微控制器有 STM32、Arduino 等。
(二)控制算法
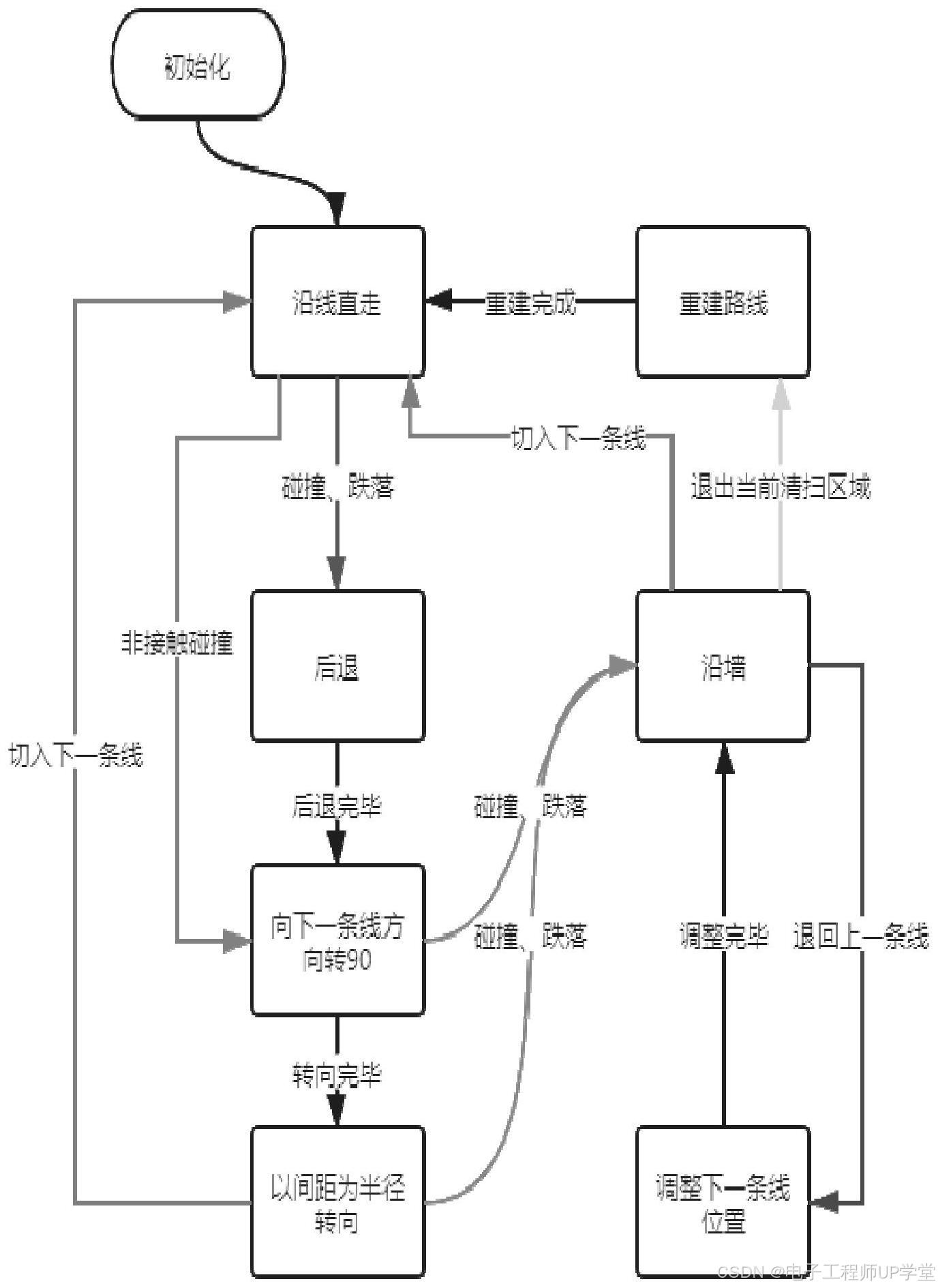
- 清扫路径规划算法
-
随机式清扫:机器人在房间内随机移动,直到覆盖整个区域。这种方式简单,但清扫效率较低。
-
规划式清扫:机器人通过传感器获取环境信息,构建地图,并根据地图规划出高效的清扫路径。常见的规划式清扫算法有弓字形清扫、螺旋形清扫等。
- 避障算法
-
基于传感器数据的避障:根据碰撞传感器、红外传感器、超声波传感器等采集的数据,判断障碍物的位置和距离,并控制机器人避开障碍物。
-
机器学习避障:通过训练机器人识别不同类型的障碍物,并根据学习到的经验进行避障。
(三)存储单元
存储单元用于存储机器人的控制程序、地图数据、清扫记录等信息。常用的存储介质有闪存(Flash)和随机存取存储器(RAM)。
六、驱动系统
(一)电机
驱动电机负责为机器人的行走和清扫机构提供动力。常见的电机类型有直流电机和无刷直流电机。直流电机成本较低,但效率和寿命相对较短;无刷直流电机效率高、寿命长,但成本较高。
(二)驱动电路
驱动电路用于将微控制器输出的控制信号转换为电机所需的驱动信号,实现电机的正反转、调速等功能。
七、清扫系统
(一)吸尘器
吸尘器是清扫系统的核心部件,负责产生吸力将地面的灰尘和杂物吸入尘盒。吸尘器的性能取决于其功率、风量和真空度等参数。
(二)边刷和滚刷
边刷和滚刷通过旋转将地面的灰尘和杂物扫向吸尘口,提高清扫效率。边刷和滚刷的材质、长度和转速等参数会影响清扫效果。
(三)湿布拖地模块(可选)
对于一些需要拖地的用户需求,可以增加湿布拖地模块。该模块通常包括水箱、湿布和压力调节装置,能够在清扫的同时进行拖地,进一步提高清洁效果。
八、电源系统
(一)电池
智能扫地机器人通常采用锂电池作为电源,其容量应根据机器人的工作时间和充电时间进行选择。一般来说,电池容量越大,机器人的工作时间越长,但充电时间也会相应增加。
(二)充电管理
充电管理模块负责监控电池的电量,当电池电量低于一定阈值时,控制机器人返回充电座进行充电。充电座通常通过市电供电,并通过接触式或无线充电方式为机器人充电。
九、通信系统
(一)蓝牙通信
蓝牙通信用于机器人与手机等移动设备之间的短距离通信。用户可以通过手机 APP 对机器人进行控制和设置,查看清扫记录和故障信息等。
(二)Wi-Fi 通信
Wi-Fi 通信用于机器人与家庭网络的连接,实现远程控制和数据上传。通过云服务器,用户可以在任何有网络的地方对机器人进行控制和监控。
十、软件系统
(一)手机 APP 软件
- 设备连接与控制
-
用户可以通过手机 APP 搜索并连接智能扫地机器人,实现对机器人的启动、停止、回充等基本操作。
-
支持设置清扫模式(如自动清扫、定点清扫、沿边清扫等)和清扫强度(如标准、强力、静音等)。
- 地图绘制与管理
-
机器人在清扫过程中会自动绘制房间地图,并实时上传至手机 APP。用户可以在地图上查看清扫区域、已清扫区域和未清扫区域。
-
支持对地图进行分区管理,用户可以为不同的区域设置不同的清扫模式和清扫时间。
- 清扫计划制定
- 用户可以根据自己的生活习惯和需求,在手机 APP 上制定清扫计划。例如,设置每天定时清扫、每周特定日期清扫等。
- 设备状态监控与故障提示
-
手机 APP 实时显示机器人的工作状态,包括电量、工作模式、清扫进度等。
-
当机器人出现故障时,手机 APP 会及时推送故障提示信息,并提供相应的解决建议。
- 耗材管理与提醒
-
记录机器人的耗材使用情况,如边刷、滚刷、滤网等的使用时间和更换周期。
-
当耗材需要更换时,手机 APP 会发送提醒通知,方便用户及时购买和更换。
(二)机器人端软件
- 传感器数据采集与处理
- 实时采集碰撞传感器、红外传感器、超声波传感器等的检测数据,并进行滤波、融合和分析,以准确感知周围环境和障碍物。
- 清扫路径规划与执行
-
根据传感器数据和预设的清扫模式,规划出高效的清扫路径,并控制驱动系统按照规划路径移动。
-
在清扫过程中,实时调整路径,避开障碍物和危险区域。
- 与手机 APP 和云服务器的通信
-
与手机 APP 保持蓝牙或 Wi-Fi 连接,实时上传清扫数据和设备状态,接收用户的控制指令。
-
与云服务器进行数据同步,实现远程控制和数据分析。
- 系统自检与故障处理
-
定期对自身的硬件和软件进行自检,检测电池状态、电机运行情况、传感器工作是否正常等。
-
当检测到故障时,采取相应的应急措施,如停止工作、返回充电座、发送故障报警等,并尝试自行修复一些简单的故障。
十一、安全与可靠性设计
(一)过载保护
当电机或驱动电路出现过载情况时,系统应能自动切断电源,防止设备损坏。
(二)短路保护
电路中应设置短路保护装置,当发生短路故障时,迅速切断电源,避免火灾等事故的发生。
(三)电池保护
对电池的充电和放电过程进行监控和管理,防止过充、过放和过热,延长电池寿命,确保使用安全。
(四)软件容错
在软件设计中,应考虑各种异常情况的处理,如传感器数据异常、通信中断等,保证系统在出现故障时能够安全停机或采取应急措施。
(五)防水防尘设计
为了提高机器人在复杂环境中的可靠性,应进行防水防尘设计,确保电子部件不受潮湿和灰尘的影响。
十二、产品测试与优化
(一)功能测试
- 清扫性能测试
-
在不同类型的地面(如地毯、木地板、瓷砖等)上投放一定量的灰尘、杂物和毛发等,测试机器人的清扫效果,包括清扫覆盖率、清洁度等。
-
对比不同清扫模式和清扫强度下的清扫效果,评估机器人的性能。
- 避障能力测试
-
在机器人的运行路径上设置各种障碍物(如家具、墙壁、电线等),测试机器人的避障能力,包括避障成功率、避障反应时间等。
-
评估机器人在不同环境光照条件下的避障性能。
- 路径规划测试
-
在较大的空间内,观察机器人的清扫路径,评估其路径规划的合理性和效率,如是否存在重复清扫、遗漏区域等。
-
测试机器人在复杂环境(如多个房间、狭窄通道等)中的路径规划能力。
- 续航能力测试
-
让机器人在满电状态下连续工作,直到电池电量耗尽,记录工作时间和清扫面积,评估其续航能力。
-
测试机器人在不同工作模式下的续航表现。
(二)可靠性测试
- 机械部件耐久性测试
-
对驱动轮、万向轮、边刷、滚刷等机械部件进行长时间的运行测试,检查其磨损情况和可靠性。
-
模拟机器人在不同地面条件下的行走情况,评估机械部件的适应性。
- 电子部件稳定性测试
-
对微控制器、传感器、电机驱动电路等电子部件进行高温、低温、潮湿等环境下的长时间工作测试,检查其稳定性和可靠性。
-
进行电磁兼容性测试,确保电子部件在复杂电磁环境下能正常工作。
- 软件稳定性测试
-
让机器人连续运行较长时间,检查软件系统是否会出现死机、崩溃等异常情况。
-
对软件系统进行压力测试,模拟大量数据处理和复杂任务执行的情况,评估其稳定性。
(三)用户体验测试
- 操作便捷性测试
-
邀请不同年龄段和文化程度的用户试用智能扫地机器人,评估其操作界面的友好性、操作流程的简洁性和操作指令的易懂性。
-
收集用户对手机 APP 操作的反馈意见,优化操作体验。
- 噪音测试
-
在不同工作模式下,测量机器人运行时产生的噪音水平,评估其对用户生活的影响。
-
优化机器人的结构和电机控制算法,降低噪音。
- 外观与尺寸适应性测试
-
观察机器人在不同家居环境中的摆放和移动情况,评估其外观设计是否美观、尺寸是否合适,是否容易与家具和其他物品协调搭配。
-
收集用户对机器人外观和尺寸的意见,进行改进。
(四)优化与改进
根据测试结果,对智能扫地机器人的机械结构、传感器系统、控制系统、清扫系统、电源系统等进行优化和改进。对软件系统进行bug修复和功能完善,提高产品的性能、可靠性和用户体验。经过多次测试和优化,确保产品达到预期的质量标准和市场需求。
十三、成本控制
在设计和开发智能扫地机器人时,需要充分考虑成本因素,以确保产品在市场上具有竞争力。以下是一些成本控制的建议:
(一)零部件选型
在选择传感器、电机、微控制器等零部件时,应在满足性能要求的前提下,选择性价比高的产品。可以通过与供应商谈判、批量采购等方式降低零部件成本。
(二)生产工艺优化
优化产品的结构设计,减少零部件数量和复杂程度,降低生产成本。同时,改进生产工艺,提高生产效率,降低人工成本。
(三)供应链管理
建立稳定的供应链体系,与供应商建立长期合作关系,确保零部件的稳定供应和价格优惠。合理安排库存,减少库存成本和资金占用。
(四)市场定位与定价策略
根据产品的功能和性能特点,合理定位目标市场和客户群体。制定合理的价格策略,既要保证产品的利润空间,又要具有市场竞争力。
十四、总结
本智能扫地机器人系统方案设计综合考虑了机械结构、传感器系统、控制系统、清扫系统、电源系统、通信系统和软件系统等多个方面,旨在为用户提供一款高效、智能、便捷的清洁设备。通过不断的优化和改进,相信该产品能够满足用户的需求,在市场上取得良好的反响。
