STM32 出租车计价器系统设计
功能目标
驱动步进电机模拟车轮旋转,并实现调速功能。
设置车轮周长和单价,检测车轮转速和运转时间。
计算并显示行驶里程和价格。
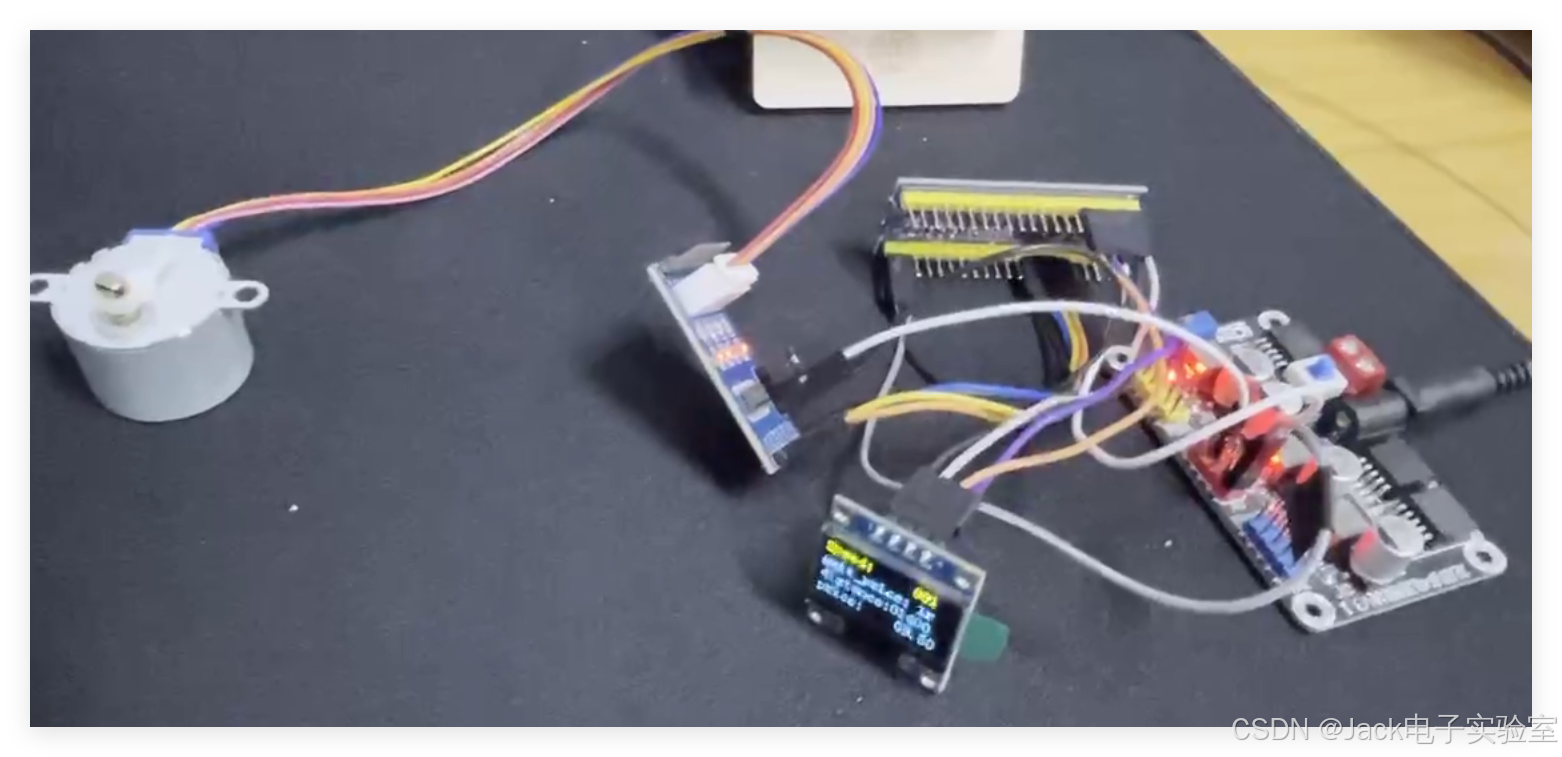
硬件材料
28BYJ48 五线四相步进电机和 ULN2003 驱动板模块
测速传感器模块
嵌入式小系统STM32
电源模块

出租车计费规则假设:
unit_price:设置每圈的价格为 1 元。
distance_of_qibu:设定起步距离为 1000cm,起步价为 7.5 元。
price、distance:分别用于存储当前价格和行驶距离,初始值为 0。
circumference:假设车轮周长为 200cm
c
float unit_price = 1;
int distance_of_qibu = 1000;
float price = 0;
float distance = 0;
float circumference = 200;OLED 显示初始化内容
c
OLED_ShowString(1, 1, "Speed:");
OLED_ShowString(2, 1, "unit_price:");
OLED_ShowString(2, 14, "r");
OLED_ShowString(3, 1, "distance:");
OLED_ShowString(4, 1, "price:");while中 OLED更新显示
c
OLED_ShowNum(1, 12, Speed - 1, 3);
OLED_ShowNum(2, 13, unit_price, 1);
OLED_ShowNum(3, 10, distance, 5);
OLED_ShowFNum(4, 10, price, 4, 2);OLED 界面

电机驱动
主要就是步进电机的控制,单片机IO口驱动能力较差,所以需要驱动模块
这里使用 ULN2003 驱动 步进电机28BYJ48
电机驱动代码
c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Key.h"
#include "Stepper.h"
uint8_t STEP; // 用于存储电机正在走过的整步编号
/**
* @brief 步进电机输出端GPIO初始化函数
* @param 无
* @retval 无
*/
void Stepper_GPIOInit(void)
{
// 选择PA0,PA1,PA2,PA3分别为相A,B,C,D的输出
RCC_APB2PeriphClockCmd(Stepper_CLK, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_InitStruct.GPIO_Pin = Stepper_LA | Stepper_LB | Stepper_LC | Stepper_LD;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Stepper_Output_GPIO, &GPIO_InitStruct);
GPIO_ResetBits(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LC | Stepper_LD);
}
/**
* @brief 电机停转函数
* @param 无
* @retval 无
*/
void Stepper_Stop(void)
{
GPIO_ResetBits(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LC | Stepper_LD);
}
/**
* @brief 4拍单相整步驱动函数
* @param StepNum 整步编号,0~3对应A~D
* @param Delay_Time_xms 每步旋转后延时时间x ms,用于控制步进电机速度(一般需大于等于2)
* @retval 无
*/
void Stepper_SingleStep(uint8_t StepNum, uint16_t Delay_Time_xms)
{
switch(StepNum)
{
case 0: // A
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA, Bit_SET);
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LB | Stepper_LC | Stepper_LD, Bit_RESET);
break;
case 1: // B
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LB, Bit_SET);
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA | Stepper_LC | Stepper_LD, Bit_RESET);
break;
case 2: // C
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LC, Bit_SET);
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LD, Bit_RESET);
break;
case 3: // D
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LD, Bit_SET);
GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LC, Bit_RESET);
break;
default: break;
}
Delay_ms(Delay_Time_xms); // 延时,控制电机速度
Stepper_Stop(); // 断电,防止电机过热
}
/**
* @brief 步进电机按步旋转
* @param direction 电机旋转方向,可以是Foreward(正传)或者Reversal(反转)
* @param step 电机转过的步数
* @param Delay_Time_xms 每步旋转后延时时间x ms,用于控制步进电机速度(一般需大于等于2)
* @retval 无
*/
void Stepper_RotateByStep(RotDirection direction, uint32_t step, uint16_t Delay_Time_xms)
{
for (uint32_t i = 0; i < step; i ++)
{
if (direction == Foreward) // 电机正传
{
STEP ++;
if (STEP > 3)
{
STEP = 0;
}
}
else if (direction == Reversal) // 电机反转
{
if (STEP < 1)
{
STEP = 4;
}
STEP --;
}
Stepper_SingleStep(STEP, Delay_Time_xms);
}
}
/**
* @brief 步进电机按整数圈旋转
* @param direction 电机旋转方向,可以是Foreward(正传)或者Reversal(反转)
* @param Loop 电机旋转的圈数
* @param Delay_Time_xms 每步旋转后延时时间x ms,用于控制步进电机速度(一般需大于等于2)
* @retval
*/
int Stepper_RotateByLoop(RotDirection direction, uint32_t Loop, uint16_t Delay_Time_xms)
{
Stepper_RotateByStep(direction, Loop * 2048, Delay_Time_xms);
return Loop;
}
c
#ifndef __STEPPER_H_
#define __STEPPER_H_
// 电机的旋转方向
typedef enum
{
Foreward = 0,
Reversal = 1
} RotDirection;
// 需要使用其他端口时,只需要更改以下的宏定义即可
// 这里需要保证四个输出端口同属一个GPIO
// 如果不能满足这一点,需要更改Stepper.c中初始化函数Stepper_Init和Stepper_RotateByStep中的一些变量名称
// 这里的宏定义是为了提高程序的可读性和可移植性,但使用stm32f10x.h中定义的原始名称也未尝不可
#define Stepper_CLK RCC_APB2Periph_GPIOA
#define Stepper_Output_GPIO GPIOA
#define Stepper_LA GPIO_Pin_0
#define Stepper_LB GPIO_Pin_1
#define Stepper_LC GPIO_Pin_2
#define Stepper_LD GPIO_Pin_3
void Stepper_GPIOInit(void);
void Stepper_Stop(void);
void Stepper_SingleStep(uint8_t StepNum, uint16_t Delay_Time_xms);
void Stepper_RotateByStep(RotDirection direction, uint32_t step, uint16_t Delay_Time_xms);
int Stepper_RotateByLoop(RotDirection direction, uint32_t Loop, uint16_t Delay_Time_xms);
#endif上面是电机驱动.c .h文件 接线也很简单 看宏定义就可以,想要具体原理,可以看网上的资料
用杜邦线接线真的很麻烦,后面准备简单画一个PCB
通过按键实现电机调速,这边加上按键中断会比较好。因为步进电机的简单代码中,会有延时函数,导致按键没有被读到。
也可以通过PWM控制电机进行调速。
有问题可以私聊我