目录
- [1 参考坐标系定义](#1 参考坐标系定义)
- [2 运动学建模](#2 运动学建模)
- [3 动力学建模](#3 动力学建模)
1 参考坐标系定义
USV的数学模型分为运动学和动力学两个部分,其中运动学描述了USV作为质点的几何运动规律;动力学描述了USV在来自螺旋桨、水扰、风扰等力作用下产生的运动规律。为了更好地表达USV的运动学和动力学模型,定义
-
全局坐标系 O E − X E Y E Z E O_E-X_EY_EZ_E OE−XEYEZE:用于描述USV的位置和姿态。全局坐标系以地球表面某一点为原点, O E X E O_EX_E OEXE指向地理正北方向, O E Y E O_EY_E OEYE指向地理正东方向, O E Z E O_EZ_E OEZE指向地心,其中 O E Z E O_EZ_E OEZE是 O E X E O_EX_E OEXE轴和 O E Y E O_EY_E OEYE轴构成平面的法线,且平面 O E X E Y E O_EX_EY_E OEXEYE与地球表面相切
-
船体坐标系 O B − X B Y B Z B O_B-X_BY_BZ_B OB−XBYBZB:用于描述USV受力后位置及姿态的瞬时变化,即线速度或角速度。船体坐标系一般以USV船体重心为原点, O B X B O_BX_B OBXB平行于海平面并指向船艏方向, O B Y B O_BY_B OBYB平行于海平面并指向船右舷方向, O B Z B O_BZ_B OBZB轴指向地心并与水平面垂直
两个坐标系间的关系如图所示
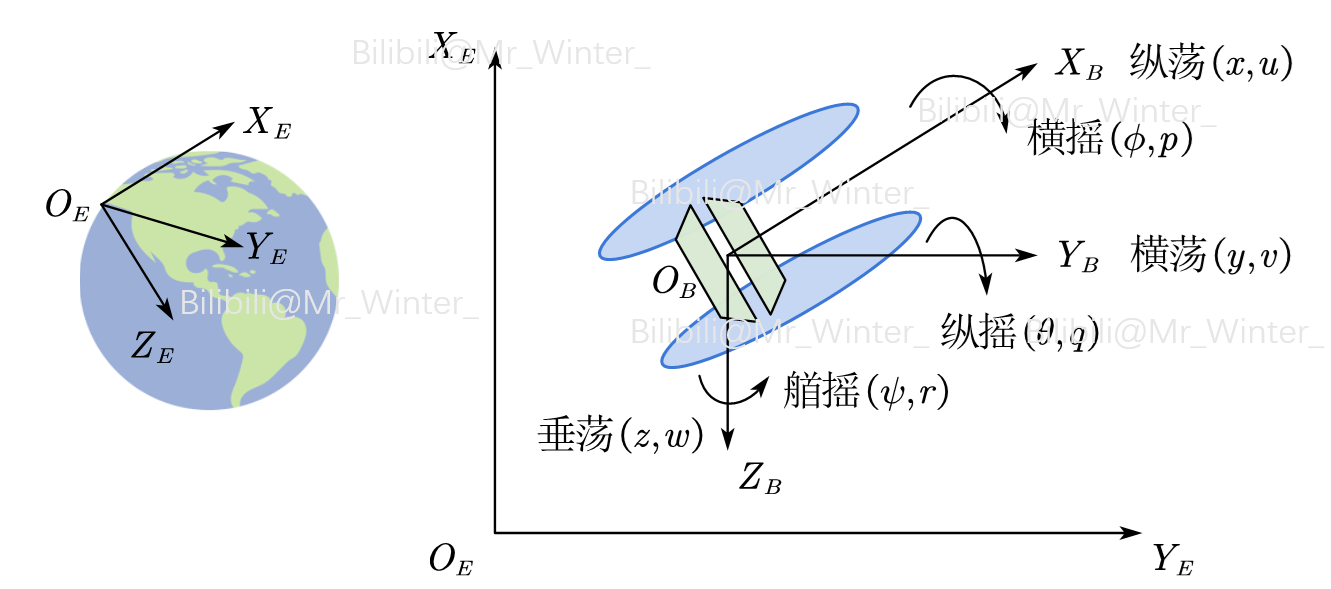
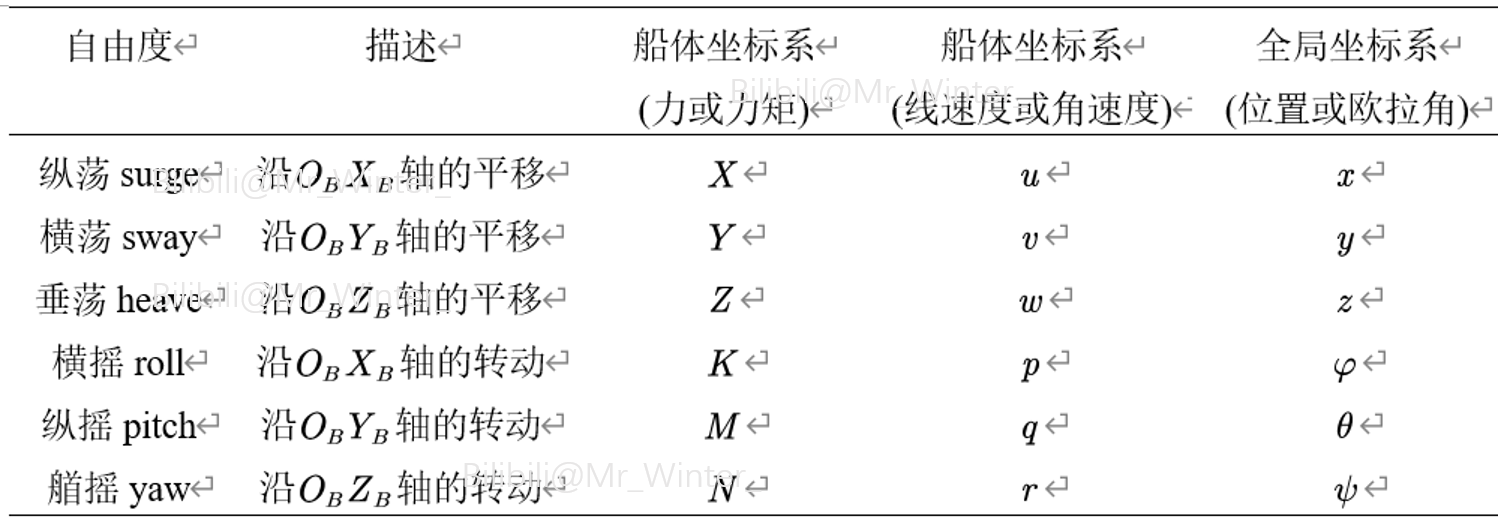
在水面环境下,USV受到多种方向上的外力,需要用多个自由度去描述其复杂的运动状态。根据造船与轮机工程师学会 (SNAME)的有关标准,使用如表所示的定义描述船舶在纵荡、横荡、垂荡、横摇、纵摇、艏摇六个自由度上的运动状态。具体而言,坐标 ( x , y , z , ϕ , θ , ψ ) \left( x,y,z,\phi ,\theta ,\psi \right) (x,y,z,ϕ,θ,ψ)表示船舶在全局坐标系下的位置和姿态;其一阶导数坐标 ( u , v , w , p , q , r ) \left( u,v,w,p,q,r \right) (u,v,w,p,q,r)表示船舶在船体坐标系下的平移线速度和转动角速度
2 运动学建模
根据上表定义的USV完整六自由度运动学模型为
{ x ˙ y ˙ z ˙ = cos θ cos ψ sin φ sin θ cos ψ − cos φ sin ψ cos φ sin θ cos ψ + sin φ sin ψ cos θ sin ψ sin φ sin θ sin ψ + cos φ cos ψ cos φ sin θ sin ψ − sin φ cos ψ − sin θ sin φ cos θ cos φ cos θ u v w φ ˙ θ ˙ ψ ˙ = 1 sin φ tan θ cos φ tan θ 0 cos φ − sin φ 0 sin φ / cos θ cos φ / cos θ p q r \begin{cases} \left \\begin{array}{c} \\dot{x}\\\\ \\dot{y}\\\\ \\dot{z}\\\\\\end{array} \\right =\left \\begin{matrix} \\cos \\theta \\cos \\psi\& \\sin \\varphi \\sin \\theta \\cos \\psi -\\cos \\varphi \\sin \\psi\& \\cos \\varphi \\sin \\theta \\cos \\psi +\\sin \\varphi \\sin \\psi\\\\ \\cos \\theta \\sin \\psi\& \\sin \\varphi \\sin \\theta \\sin \\psi +\\cos \\varphi \\cos \\psi\& \\cos \\varphi \\sin \\theta \\sin \\psi -\\sin \\varphi \\cos \\psi\\\\ -\\sin \\theta\& \\sin \\varphi \\cos \\theta\& \\cos \\varphi \\cos \\theta\\\\\\end{matrix} \\right \left \\begin{array}{c} u\\\\ v\\\\ w\\\\\\end{array} \\right\\ \left \\begin{array}{c} \\dot{\\varphi}\\\\ \\dot{\\theta}\\\\ \\dot{\\psi}\\\\\\end{array} \\right =\left \\begin{matrix} 1\& \\sin \\varphi \\tan \\theta\& \\cos \\varphi \\tan \\theta\\\\ 0\& \\cos \\varphi\& -\\sin \\varphi\\\\ 0\& {{\\sin \\varphi}/{\\cos \\theta}}\& {{\\cos \\varphi}/{\\cos \\theta}}\\\\\\end{matrix} \\right \left \\begin{array}{c} p\\\\ q\\\\ r\\\\\\end{array} \\right\\\end{cases} ⎩ ⎨ ⎧ x˙y˙z˙ = cosθcosψcosθsinψ−sinθsinφsinθcosψ−cosφsinψsinφsinθsinψ+cosφcosψsinφcosθcosφsinθcosψ+sinφsinψcosφsinθsinψ−sinφcosψcosφcosθ uvw φ˙θ˙ψ˙ = 100sinφtanθcosφsinφ/cosθcosφtanθ−sinφcosφ/cosθ pqr
USV在水中虽然存在六个自由度上的运动,但是上述完整的运动学模型过于复杂,对运动分析和控制器设计造成困难。考虑到实际应用中USV在垂荡、纵摇及横摇三个自由度上的运动幅度相对很小,一般忽略这三个自由度上的运动状态,即令
w = p = q = z = φ = θ = 0 w=p=q=z=\varphi =\theta =0 w=p=q=z=φ=θ=0
得到简化的三自由度USV运动学模型
x ˙ y ˙ ψ ˙ = cos ψ − sin ψ 0 sin ψ cos ψ 0 0 0 1 u v r ⇒ η = R v \left \\begin{array}{c} \\dot{x}\\\\ \\dot{y}\\\\ \\dot{\\psi}\\\\\\end{array} \\right =\left \\begin{matrix} \\cos \\psi\& -\\sin \\psi\& 0\\\\ \\sin \\psi\& \\cos \\psi\& 0\\\\ 0\& 0\& 1\\\\\\end{matrix} \\right \left \\begin{array}{c} u\\\\ v\\\\ r\\\\\\end{array} \\right \Rightarrow \boldsymbol{\eta }=\boldsymbol{Rv} x˙y˙ψ˙ = cosψsinψ0−sinψcosψ0001 uvr ⇒η=Rv
3 动力学建模
Fossen建立了统一的船舶动力学模型,将USV的受力分解为刚体力、流体动力、推进力和干扰力
M v ˙ + C ( v ) v + D ( v ) v + g ( η ) = τ + τ E \boldsymbol{M\dot{v}}+\boldsymbol{C}\left( \boldsymbol{v} \right) \boldsymbol{v}+\boldsymbol{D}\left( \boldsymbol{v} \right) \boldsymbol{v}+\boldsymbol{g}\left( \boldsymbol{\eta } \right) =\boldsymbol{\tau }+\boldsymbol{\tau }_E Mv˙+C(v)v+D(v)v+g(η)=τ+τE
上式中 M \boldsymbol{M} M为船体系统的惯性矩阵,由刚体惯性矩阵 M R B \boldsymbol{M}_{RB} MRB和附加质量矩阵 M A \boldsymbol{M}_A MA组成
M = M R B + M A = m 11 m 22 m 23 m 32 m 33 \boldsymbol{M}=\boldsymbol{M}_{RB}+\boldsymbol{M}_A=\left \\begin{matrix} m_{11}\& \& \\\\ \& m_{22}\& m_{23}\\\\ \& m_{32}\& m_{33}\\\\\\end{matrix} \\right M=MRB+MA= m11m22m32m23m33
其中船舶质量为 m m m, ( x g , y g , z g ) \left( x_g,y_g,z_g \right) (xg,yg,zg)是船舶重心在船体坐标系下的坐标, I z I_z Iz是绕 O B Z B O_BZ_B OBZB转动惯量
M R B = m − m y g m m x g − m y g m x g I z , M A = − X u ˙ X r ˙ Y v ˙ Y r ˙ N u ˙ N v ˙ N r ˙ \boldsymbol{M}_{RB}=\left \\begin{matrix} m\& \& -my_g\\\\ \& m\& mx_g\\\\ -my_g\& mx_g\& I_z\\\\\\end{matrix} \\right , \boldsymbol{M}_A=-\left \\begin{matrix} X_{\\dot{u}}\& \& X_{\\dot{r}}\\\\ \& Y_{\\dot{v}}\& Y_{\\dot{r}}\\\\ N_{\\dot{u}}\& N_{\\dot{v}}\& N_{\\dot{r}}\\\\\\end{matrix} \\right MRB= m−mygmmxg−mygmxgIz ,MA=− Xu˙Nu˙Yv˙Nv˙Xr˙Yr˙Nr˙
C ( v ) \boldsymbol{C}\left( \boldsymbol{v} \right) C(v)为科氏力-向心力矩阵,由刚体科氏力-向心力矩阵 C R B ( v ) \boldsymbol{C}_{RB}\left( \boldsymbol{v} \right) CRB(v)和附加科氏力-向心力矩阵 C A ( v ) \boldsymbol{C}_A\left( \boldsymbol{v} \right) CA(v)组成
C ( v ) = C R B ( v ) + C A ( v ) = 0 0 c 13 0 0 c 23 c 31 c 32 0 \boldsymbol{C}\left( \boldsymbol{v} \right) =\boldsymbol{C}_{RB}\left( \boldsymbol{v} \right) +\boldsymbol{C}_A\left( \boldsymbol{v} \right) =\left \\begin{matrix} 0\& 0\& c_{13}\\\\ 0\& 0\& c_{23}\\\\ c_{31}\& c_{32}\& 0\\\\\\end{matrix} \\right C(v)=CRB(v)+CA(v)= 00c3100c32c13c230
其中
C R B ( v ) = 0 0 − m ( x g r + v ) 0 0 − m ( y g r − u ) m ( x g r + v ) m ( y g r − u ) 0 C A ( v ) = 0 0 Y v ˙ v + Y r ˙ r 0 0 − X u ˙ u − Y v ˙ v − Y r ˙ r X u ˙ u 0 \boldsymbol{C}_{RB}\left( \boldsymbol{v} \right) =\left \\begin{matrix} 0\& 0\& -m\\left( x_gr+v \\right)\\\\ 0\& 0\& -m\\left( y_gr-u \\right)\\\\ m\\left( x_gr+v \\right)\& m\\left( y_gr-u \\right)\& 0\\\\\\end{matrix} \\right \\\boldsymbol{C}_A\left( \boldsymbol{v} \right) =\left \\begin{matrix} 0\& 0\& Y_{\\dot{v}}v+Y_{\\dot{r}}r\\\\ 0\& 0\& -X_{\\dot{u}}u\\\\ -Y_{\\dot{v}}v-Y_{\\dot{r}}r\& X_{\\dot{u}}u\& 0\\\\\\end{matrix} \\right CRB(v)= 00m(xgr+v)00m(ygr−u)−m(xgr+v)−m(ygr−u)0 CA(v)= 00−Yv˙v−Yr˙r00Xu˙uYv˙v+Yr˙r−Xu˙u0
D ( v ) \boldsymbol{D}\left( \boldsymbol{v} \right) D(v)为阻尼矩阵,由线性阻尼矩阵 D \boldsymbol{D} D和非线性阻尼矩阵 D n ( v ) \boldsymbol{D}_n\left( \boldsymbol{v} \right) Dn(v)组成
D ( v ) = D + D n ( v ) = d 11 d 22 d 23 d 32 d 33 \boldsymbol{D}\left( \boldsymbol{v} \right) =\boldsymbol{D}+\boldsymbol{D}_n\left( \boldsymbol{v} \right) =\left \\begin{matrix} d_{11}\& \& \\\\ \& d_{22}\& d_{23}\\\\ \& d_{32}\& d_{33}\\\\\\end{matrix} \\right D(v)=D+Dn(v)= d11d22d32d23d33
其中
D = − X u Y v Y r N v N r , D n ( v ) = − X ∣ u ∣ u ∣ u ∣ Y ∣ v ∣ v ∣ v ∣ + Y ∣ r ∣ v ∣ r ∣ Y ∣ v ∣ r ∣ v ∣ + Y ∣ r ∣ r ∣ r ∣ N ∣ v ∣ v ∣ v ∣ + N ∣ r ∣ v ∣ r ∣ N ∣ v ∣ r ∣ v ∣ + N ∣ r ∣ r ∣ r ∣ \boldsymbol{D}=-\left \\begin{matrix} X_u\& \& \\\\ \& Y_v\& Y_r\\\\ \& N_v\& N_r\\\\\\end{matrix} \\right , \boldsymbol{D}_n\left( \boldsymbol{v} \right) =-\left \\begin{matrix} X_{\\left\| u \\right\|u}\\left\| u \\right\|\& \& \\\\ \& Y_{\\left\| v \\right\|v}\\left\| v \\right\|+Y_{\\left\| r \\right\|v}\\left\| r \\right\|\& Y_{\\left\| v \\right\|r}\\left\| v \\right\|+Y_{\\left\| r \\right\|r}\\left\| r \\right\|\\\\ \& N_{\\left\| v \\right\|v}\\left\| v \\right\|+N_{\\left\| r \\right\|v}\\left\| r \\right\|\& N_{\\left\| v \\right\|r}\\left\| v \\right\|+N_{\\left\| r \\right\|r}\\left\| r \\right\|\\\\\\end{matrix} \\right D=− XuYvNvYrNr ,Dn(v)=− X∣u∣u∣u∣Y∣v∣v∣v∣+Y∣r∣v∣r∣N∣v∣v∣v∣+N∣r∣v∣r∣Y∣v∣r∣v∣+Y∣r∣r∣r∣N∣v∣r∣v∣+N∣r∣r∣r∣
g ( η ) \boldsymbol{g}\left( \boldsymbol{\eta } \right) g(η)是由重力和浮力产生的恢复力和力矩。控制力 τ = τ u τ v τ r T \boldsymbol{\tau }=\left \\begin{matrix} \\tau _u\& \\tau _v\& \\tau _r\\\\\\end{matrix} \\right ^T τ=τuτvτrT,其中 τ u \tau _u τu、 τ v \tau _v τv、 τ r \tau _r τr分别表示由螺旋桨产生的前进力、横漂力和艏摇力矩
上面涉及到的水动力系数的含义如下所示
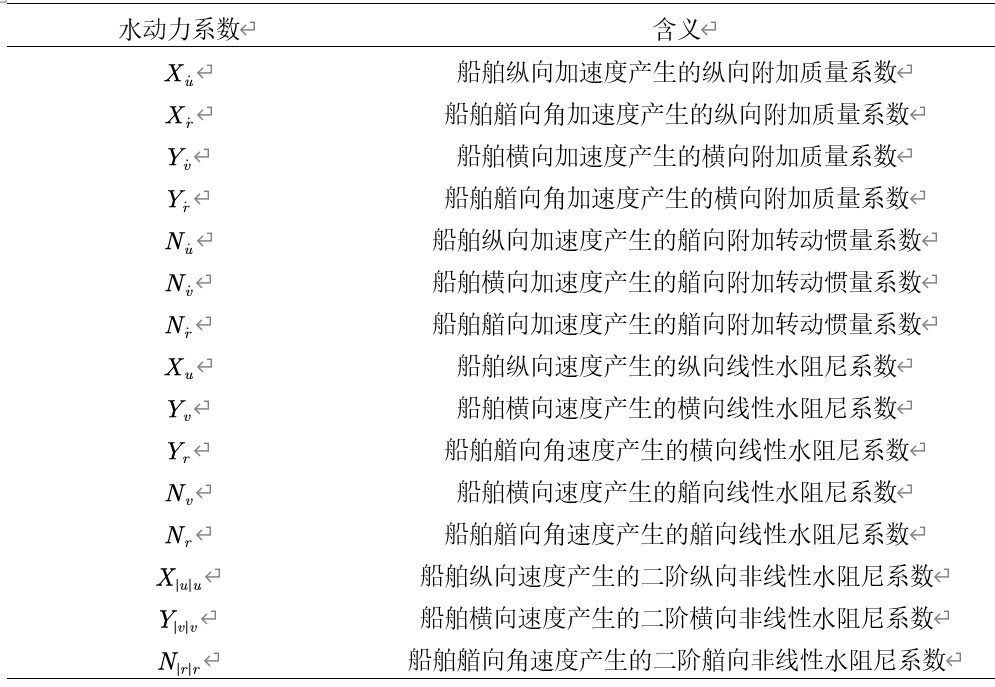
至此,USV的运动学和动力学建模完成,本专栏的后续章节都将以本节推导的模型展开规划、控制算法设计
🔥 更多精彩专栏:
👇源码获取 · 技术交流 · 抱团学习 · 咨询分享 请联系👇