目录
[4.2 雷达光电多目标航迹融合算法原理](#4.2 雷达光电多目标航迹融合算法原理)
1.程序功能描述
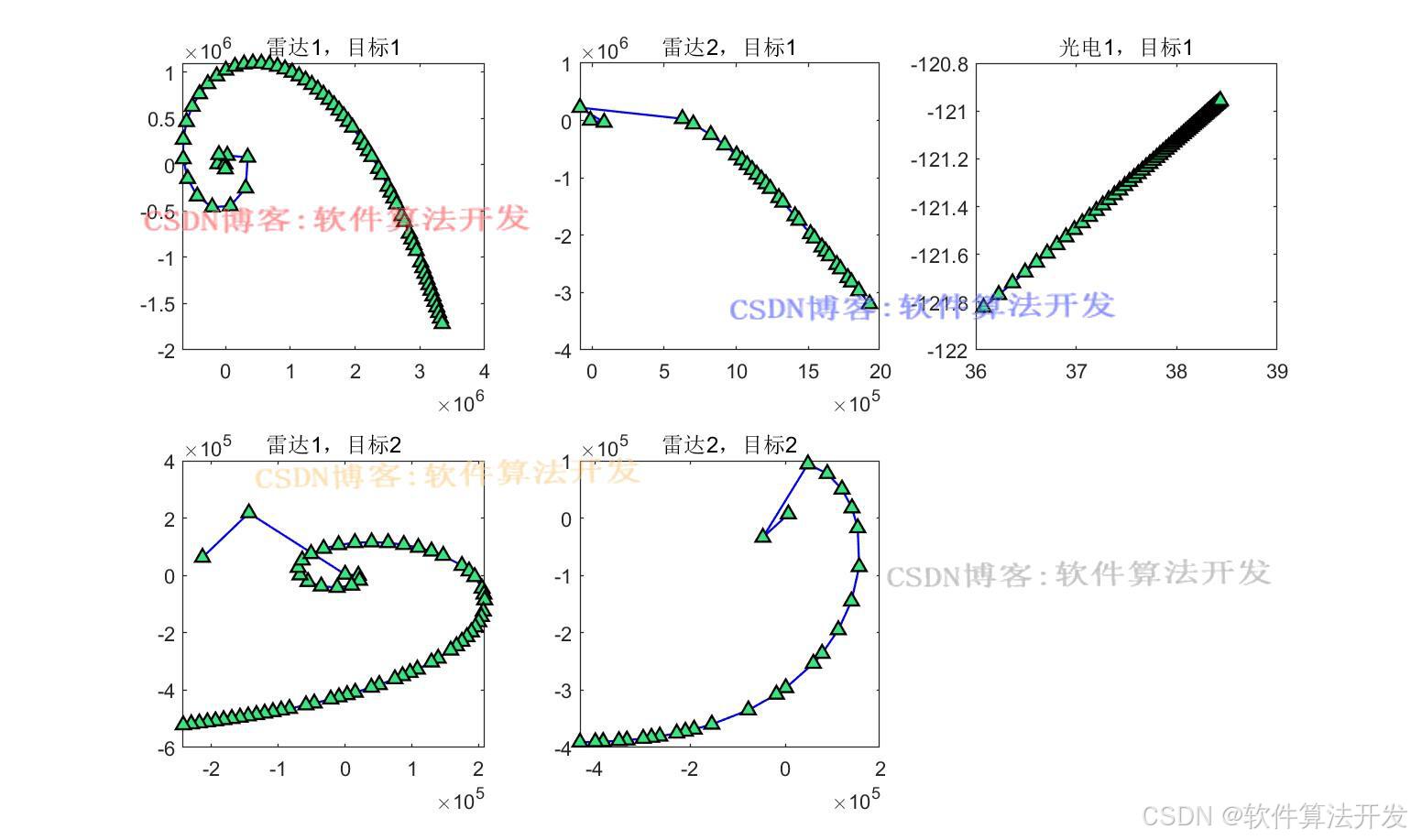
基于卡尔曼滤波的雷达光电多目标航迹融合算法matlab仿真。实现2个雷达,一个光电下的双目标航迹融合。将雷达和光电传感器的数据进行融合,可以充分发挥两者的优势,提高目标跟踪的精度和可靠性。
2.测试软件版本以及运行结果展示
matlab2022a/matlab2024b版本运行
3.核心程序
...........................................................................
%对两个雷达进行kalman滤波融合,主要对距离,俯仰,方位三个数据进行融合
%进行卡尔曼处理,两个雷达的扫描进行合并+包括坐标系的转换
K1_A1_dat = func_func_kalman_total1(S1_A1_dat,S2_A1_dat,1);
K1_A2_dat = func_func_kalman_total1(S1_A2_dat,S2_A2_dat,1);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%以下部分开始光电部分的处理
if type == 3%光电
idx3 = idx3+1;
T3_time(idx3) = tmps(1);%时间序号
T3_package(idx3) = tmps(2);%数据包序号
T3_Aimtime(idx3) = tmps(3);%目标时间(秒)
T3_theta1(idx3) = tmps(5);%俯仰(度)
T3_theta2(idx3) = tmps(6);%方位(度)
%直接极坐标下进行关联
datmp3 = [T3_time(idx3),T3_package(idx3),T3_Aimtime(idx3),T3_theta1(idx3),T3_theta2(idx3)];
%直接极坐标下进行关联
if idx2 > Start %消除一开始的有误差的几帧
tmp1 = [T3_theta1(Start),T3_theta2(Start)];
tmp2 = [T3_theta1(idx3) ,T3_theta2(idx3)];
dst = sqrt((tmp1(1)-tmp2(1))^2 + (tmp1(2)-tmp2(2))^2);
if dst>LVL%关联分类
T3_A1_dat= [T3_A1_dat;datmp3];%关联上则加入数据向量
T3_A2_dat= T3_A2_dat;%没有关联上,则丢弃
else
T3_A1_dat= T3_A1_dat;%没有关联上,则丢弃
T3_A2_dat= [T3_A2_dat;datmp3];%关联上则加入数据向量
end
end
end
%插值
if size(T3_A1_dat,1)>=2%插值
C3_A1_dat = func_insert(T3_A1_dat,2);
end
if size(T3_A2_dat,1)>=2%插值
C3_A2_dat = func_insert(T3_A2_dat,2);
end
%时间对齐同步
S3_A1_dat = C3_A1_dat;
S3_A2_dat = C3_A2_dat;
K3_A1_dat = S3_A2_dat;
K3_A2_dat = S3_A1_dat;
%将这些数据进行合并到新的航迹矩阵中
%时间对齐同步
[RD_A1_Dat,GD_A1_Dat]=func_timesysn(K1_A1_dat,K3_A1_dat);
[RD_A2_Dat,GD_A2_Dat]=func_timesysn(K1_A2_dat,K3_A2_dat);
%将雷达和光电数据融合到目标对应的估计中,获得目标最终的轨迹
A1_dat = func_func_kalman_total2(RD_A1_Dat,GD_A1_Dat);
A2_dat = func_func_kalman_total2(RD_A2_Dat,GD_A2_Dat);
end
[x0,y0] = pol2cart(A1_dat(:,4),A1_dat(:,5));
x1 = [A1_dat(:,3).*x0];
y1 = [A1_dat(:,3).*y0];
[x0,y0] = pol2cart(A2_dat(:,4),A2_dat(:,5));
x2 = [A2_dat(:,3).*x0];
y2 = [A2_dat(:,3).*y0];
%显示算法处理前的效果
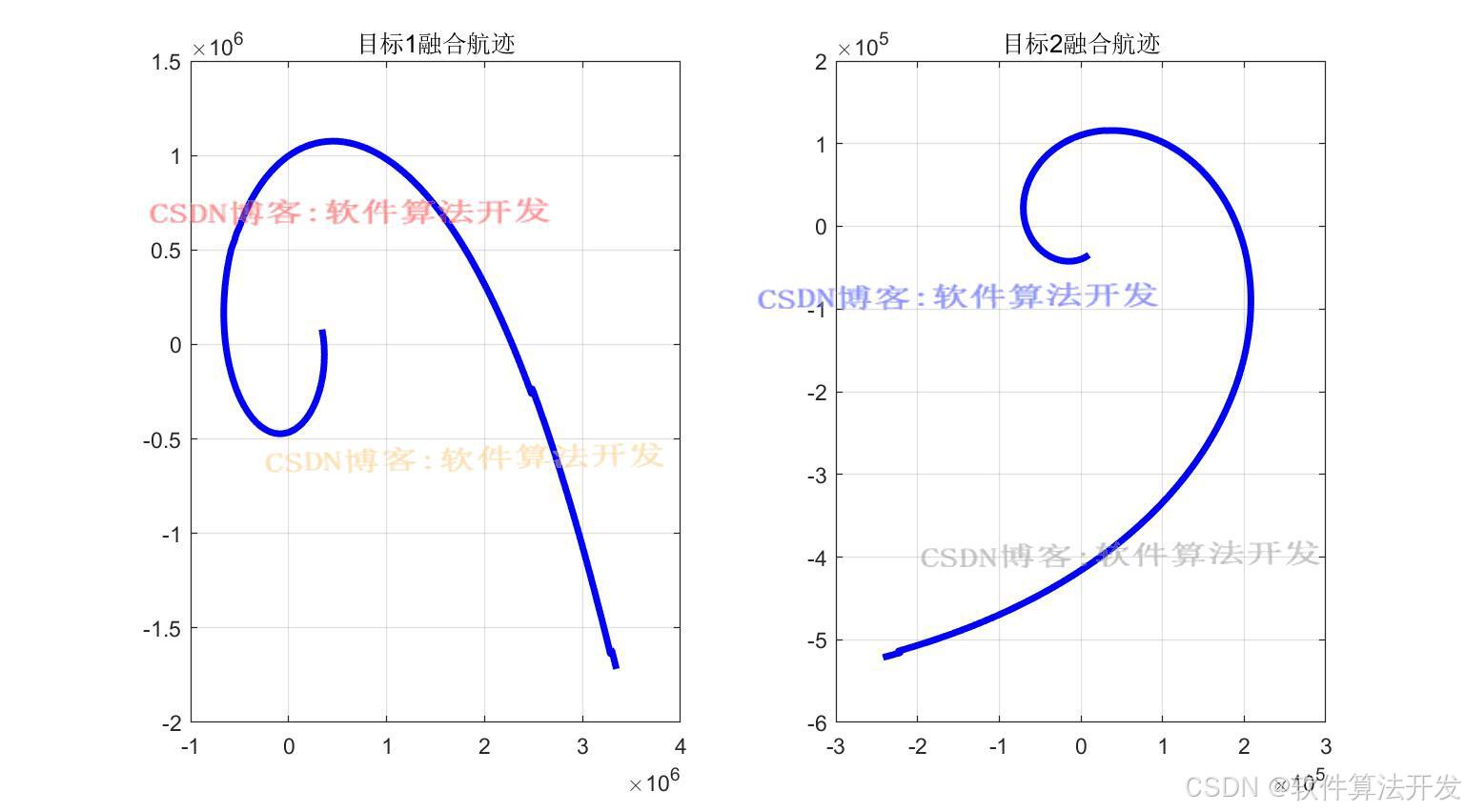
figure;
subplot(121);plot(x1,y1,'b','linewidth',3);title('目标1融合航迹');
grid on
subplot(122);plot(x2,y2,'b','linewidth',3);title('目标2融合航迹');
grid on
016_069m4.本算法原理
在现代多传感器目标跟踪系统中,雷达和光电传感器具有各自独特的优势。雷达能够在较远的距离上对目标进行探测和跟踪,提供目标的距离、速度等信息;光电传感器则具有较高的角度测量精度和图像分辨率,能够提供目标的视觉特征。将雷达和光电传感器的数据进行融合,可以充分发挥两者的优势,提高目标跟踪的精度和可靠性。卡尔曼滤波作为一种经典的最优估计方法,在多目标航迹融合中得到了广泛的应用。
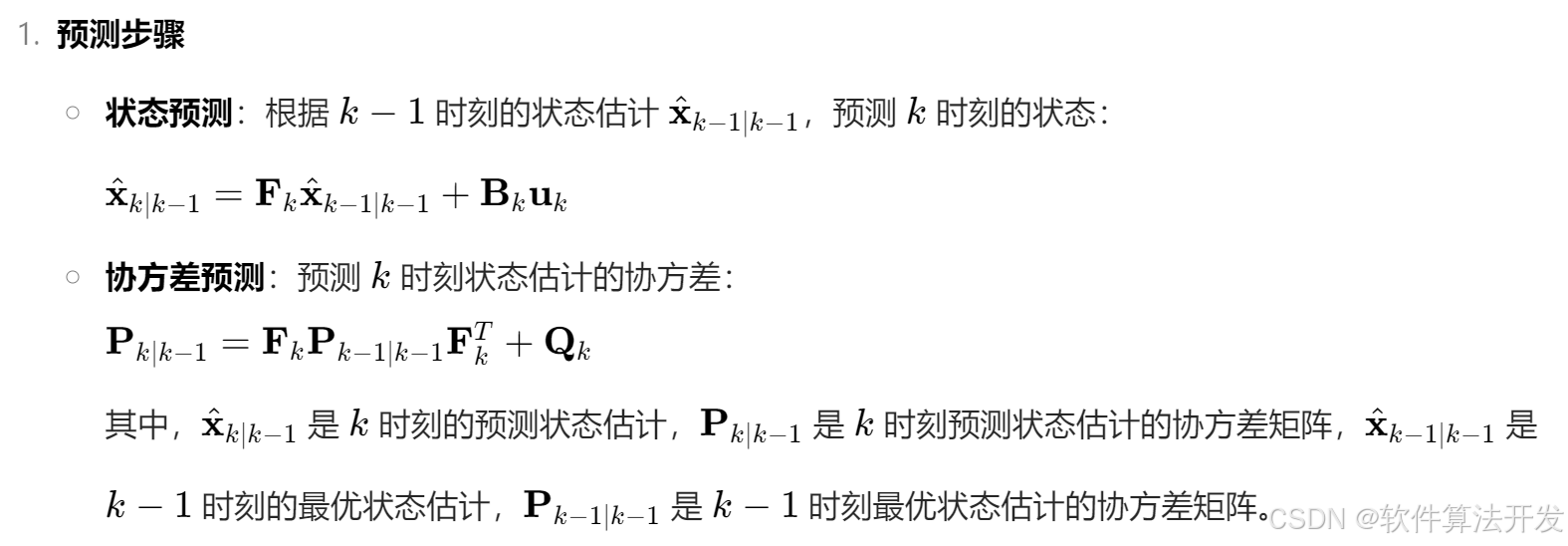
4.1卡尔曼滤波步骤
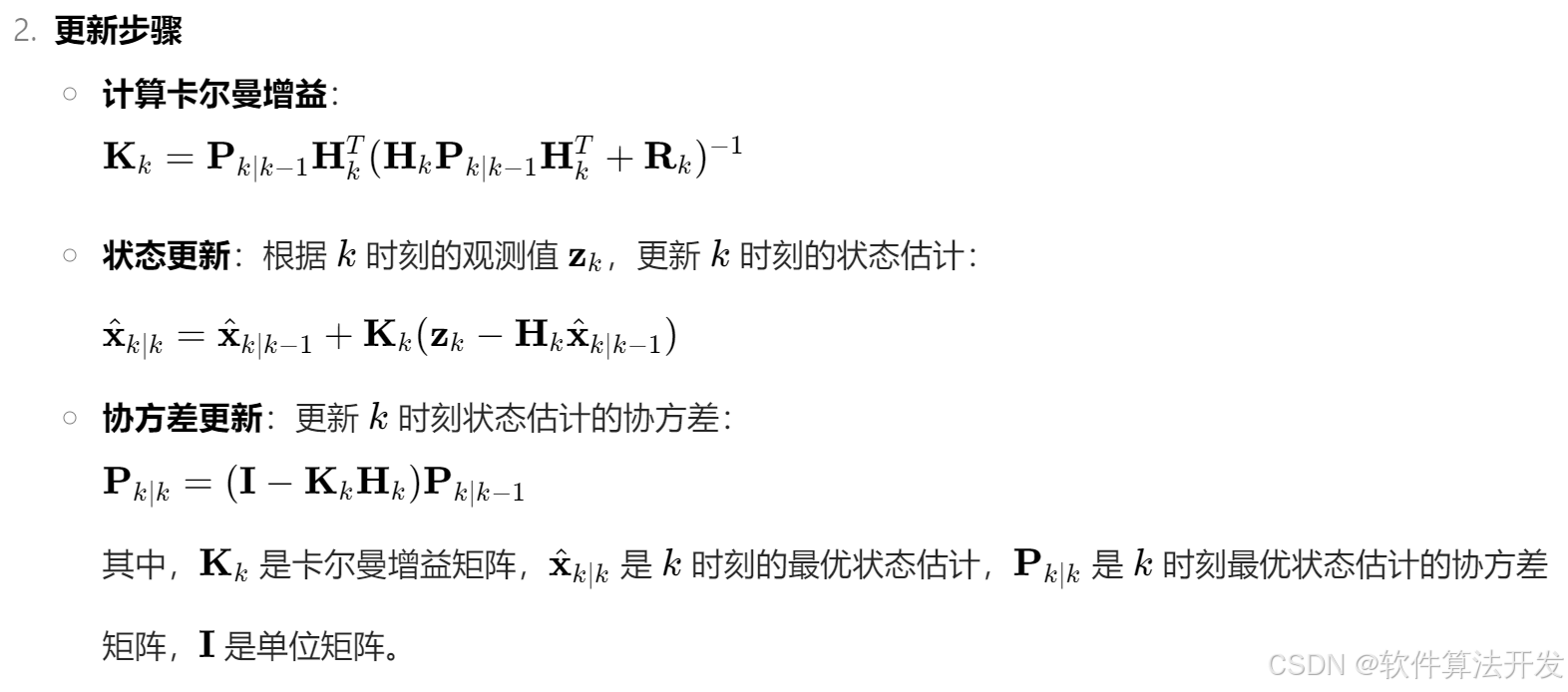
卡尔曼滤波主要包括预测和更新两个步骤:
4.2 雷达光电多目标航迹融合算法原理
在进行航迹融合之前,需要对雷达和光电传感器的数据进行预处理,包括数据校准、时间同步等操作。
数据校准:由于雷达和光电传感器的测量原理和安装位置不同,它们的测量数据可能存在一定的偏差。需要对这些偏差进行校准,使不同传感器的数据在同一坐标系下具有一致性。
时间同步:雷达和光电传感器的采样频率可能不同,需要对它们的数据进行时间同步,确保在同一时刻进行融合处理。
航迹关联:航迹关联是多目标航迹融合的关键步骤,其目的是将不同传感器的航迹进行匹配,确定哪些航迹对应同一个目标。
通过融合雷达和光电传感器的数据,可以充分利用两者的优势,提高目标跟踪的精度。雷达提供的距离和速度信息与光电传感器提供的高精度角度信息相结合,能够更准确地估计目标的状态。
5.完整程序
VVV