"无需环境适配、无需代码修改,Hello Robot发布的Robot Utility Models(RUMs)技术,正在重新定义机器人应用边界。通过5大类1000+真实场景训练数据,这套模型已实现在陌生环境中90%的任务成功率,标志着机器人从「专用设备」向「通用智能体」的重要跨越。"

Stretch 3是Hello Robot推出的一款轻便移动操作机器人,以其出色的灵活性和适应性受到关注。结合RUMs技术,Stretch 3移动操作机器人能够在不同环境下高效完成多种任务,无需额外的数据集或再训练过程。Stretch 3的这种能力不仅展示了机器人技术的发展潜力,也为多个行业带来了新的机遇。
解锁Haply精准三维力反馈交互!Inverse3三轴力反馈控制器在外科手术模拟与机器人遥操作中大放异彩。
**🌟**RUMs 模型:零样本部署的核心引擎

由纽约大学等机构联合研发的Robot Utility Models (RUMs),通过多模态模仿学习与外部大模型验证,实现了90%的跨环境任务成功率。无需额外数据或训练,即可直接部署于新场景,涵盖开门、取物、物品复位等五大核心功能。
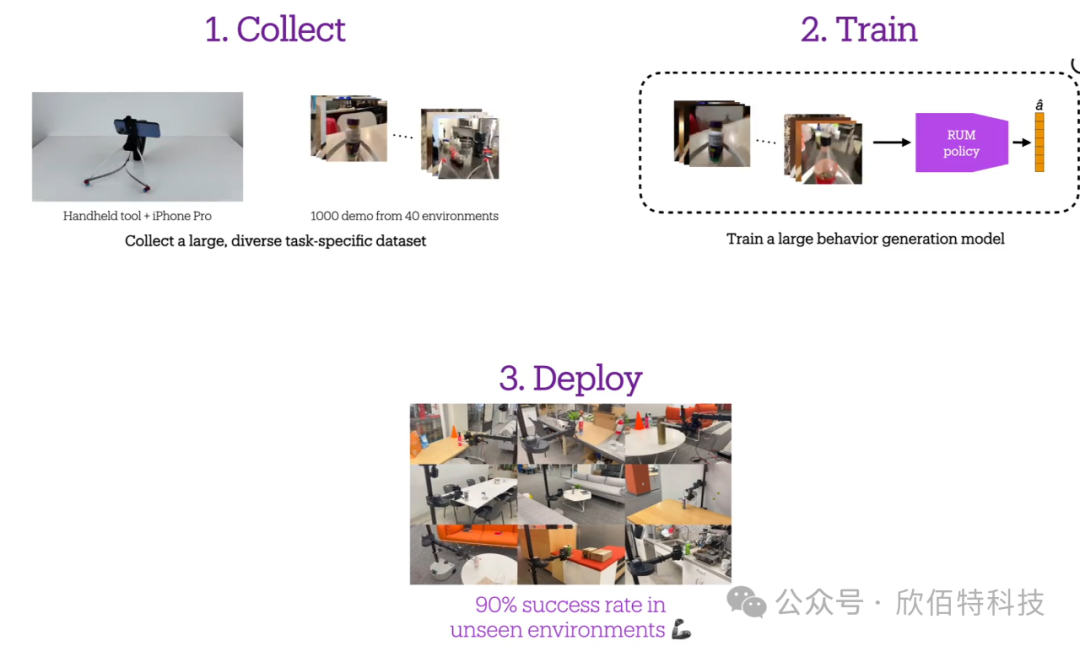

视频中,机器人就像拥有了"自我纠错"能力,当任务失败,它会把观测总结"告诉"多模态大语言模型,模型判断失败后,机器人便自动重置到初始状态,再次勇敢尝试。RUMs技术:零样本部署的技术亮点
✅ 零样本泛化:通过36个环境、5,509 条轨迹训练,模型可直接适应未见过的物体与环境。
✅ 多模态融合 :结合RGB 视觉、机械臂位姿数据与大模型决策,提升复杂场景应对能力。
✅ 硬件兼容性:支持 Stretch3、xArm 等多平台,通过标准化夹具实现快速适配。

应用场景示例
厨房场景:自动打开微波炉 / 抽屉,拾取纸巾、纸袋等异形物体。

家庭清洁:扶起倾倒的花瓶、整理散落物品。
**辅助养老:**精准操作电器开关,完成轻量级搬运任务。
未来展望:机器人技术的无限可能
RUMs技术不仅提高了机器人的适应性和效率,还为机器人技术的广泛应用铺平了道路。随着技术的不断进步,我们有理由相信,机器人将成为未来生活和工作的核心力量。
引用链接
论文链接:《Robot Utility Models: General Policies for Zero-Shot Deployment》
https://robotutilitymodels.com/dataset
开源数据集:5 任务180环境训练数据https://robotutilitymodels.com/dataset
GitHub 代码:RUMs 算法实现