文章目录
引言
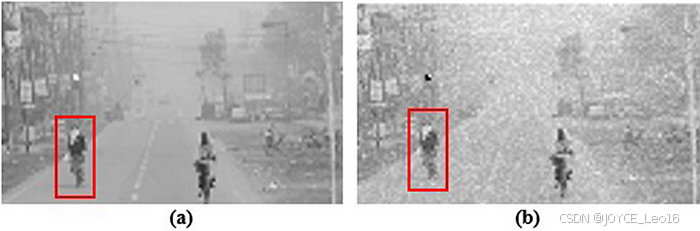
在计算机视觉领域,目标检测是一项关键任务,它使计算机能够识别和定位数字图像中的物体。这项技术支撑着从自动驾驶汽车到安全系统等众多应用。然而,目标检测算法的有效性很大程度上取决于输入图像的质量。图像退化是一个常见的问题,可能由低分辨率、噪声、模糊和压缩伪影等多种因素引起,严重阻碍目标检测系统的性能。本文深入探讨图像退化对目标检测的影响,分析其带来的挑战,并探索缓解这些影响的潜在解决方案。
在光与像素的复杂交织中,清晰与复杂相遇,目标检测的探索提醒我们,即使在一个数据充斥的世界中,图像中最微小的退化也可能在我们的数字成果中产生深远的影响。
1、理解图像退化
图像退化师指由于传感器限制、传输错误、环境条件和处理方法等因素导致的图像质量下降。常见的退化形式包括:
- 噪声:图像中亮度或颜色信息的随机变化,通常由光照条件差或传感器质量低引起。
- 模糊:图像锐度下降,通常由运动或对焦问题引起。
- 压缩伪影:图像压缩以减少文件时引入的失真。
- 低分辨率:像素密度降低,导致图像细节减少。
这些退化可能掩盖或改变图像中物体的关键特征,为目标检测算法带来重大挑战。
2、目标检测中的挑战
目标检测算法,尤其是基于深度学习的算法,严重依赖输入数据的质量。图像退化可能导致以下问题:
- 准确性下降:退化可能导致算法漏检物体或误检不存在的物体。
- 模糊性增加:模糊或噪声图像可能导致物体边界和特征的模糊性,使检测复杂化。
- 训练与测试差异:如果训练数据质量高而实际数据退化,检测模型的性能可能显著下降。
3、应对退化的自适应方法
为应对这些挑战,可以采用以下策略:
数据增强:在训练阶段引入退化图像,使模型在现实场景中对此类条件更具鲁棒性。
图像恢复:在检测前应用去噪、去模糊和超分辨率等预处理技术以提高图像质量。
鲁棒算法设计:开发对图像退化具有更高容忍度的算法,例如强调特征不变性的算法。
4、新兴技术与研究方向
深度学习的最新进展提供了有前景的解决方案:
- 生成对抗网络(GANs):可用于有效的图像恢复,增强退化图像中物体的可检测性。
- 注意力机制:具有注意力机制的算法可以聚焦于图像中最相关的部分,减少退化区域的影响。
- 迁移学习:利用高质量数据集上的预训练模型可以提高低质量图像中的检测效果。
5、未来展望
尽管已取得显著进展,但图像退化对目标检测的挑战仍然是一个活跃的研究领域。当前的研究重点包括创建更具适应性和鲁棒性的模型、改进图像恢复技术以及开发包含各种退化形式的综合数据集。
6、代码
创建一个完整的Python代码来演示图像退化对目标检测的影响涉及多个步骤。我们需要:
① 生成一个合成数据集;
② 应用图像退化(如噪声、模糊和压缩);
③ 实现目标检测算法;
④ 评估在有和无图像退化情况下的性能。
鉴于复杂性,这里提供一个使用基本合成数据集和简单目标检测方法的简化示例。我们将使用 OpenCV 进行图像处理,并使用 matplotlib 进行绘图。
python
import numpy as np
import cv2
import matplotlib.pyplot as plt
def create_synthetic_image():
# Create a blank 256x256 black image
image = np.zeros((256, 256, 3), np.uint8)
# Draw a rectangle (object)
cv2.rectangle(image, (50, 50), (200, 200), (255, 0, 0), -1) # Blue rectangle
return image
# Generate an example image
example_image = create_synthetic_image()
plt.imshow(cv2.cvtColor(example_image, cv2.COLOR_BGR2RGB))
plt.show()
def apply_blur(image):
return cv2.GaussianBlur(image, (5, 5), 0)
def apply_noise(image):
row, col, ch = image.shape
mean = 0
sigma = 10
gauss = np.random.normal(mean, sigma, (row, col, ch))
noisy = image + gauss.reshape(row, col, ch)
return noisy.clip(0, 255).astype(np.uint8)
def apply_compression(image, quality=10):
encode_param = [int(cv2.IMWRITE_JPEG_QUALITY), quality]
_, encoded_img = cv2.imencode('.jpg', image, encode_param)
decoded_img = cv2.imdecode(encoded_img, 1)
return decoded_img
# Apply degradation
blurred_image = apply_blur(example_image)
noisy_image = apply_noise(example_image)
compressed_image = apply_compression(example_image)
def detect_object(image):
# Convert to HSV for easier color detection
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# Define range for blue color and create a mask
lower_blue = np.array([110,50,50])
upper_blue = np.array([130,255,255])
mask = cv2.inRange(hsv, lower_blue, upper_blue)
# Find contours
contours, _ = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
return len(contours) > 0 # Return True if object detected
# Detect objects in degraded images
detected_in_blurred = detect_object(blurred_image)
detected_in_noisy = detect_object(noisy_image)
detected_in_compressed = detect_object(compressed_image)
print(f"Detected in Blurred: {detected_in_blurred}")
print(f"Detected in Noisy: {detected_in_noisy}")
print(f"Detected in Compressed: {detected_in_compressed}")
def plot_images(images, titles):
plt.figure(figsize=(10, 10))
for i in range(len(images)):
plt.subplot(1, len(images), i+1)
plt.imshow(cv2.cvtColor(images[i], cv2.COLOR_BGR2RGB))
plt.title(titles[i])
plt.axis('off')
plt.show()
plot_images([example_image, blurred_image, noisy_image, compressed_image], ["Original", "Blurred", "Noisy", "Compressed"])
python
Detected in Blurred: True
Detected in Noisy: True
Detected in Compressed: True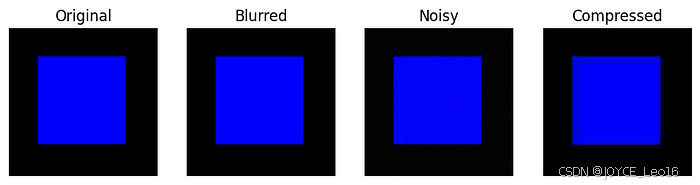
此代码提供了一个基本框架。在实际应用中,可以使用更复杂的数据集和更先进的目标检测算法(如YOLO或SSD)进行深入分析。
7、结论
图像退化显著影响了目标检测系统的有效性,提出了需要创新解决方案的挑战。通过自适应训练策略、先进的预处理技术和鲁棒算法的开发,该领域正在不断克服这些障碍。随着技术的进步,目标检测系统对图像退化的鲁棒性无疑将得到提高,从而拓宽其在不同领域中的应用范围和可靠性。
参考资料:深度学习爱好者