1.环境配置
ubuntu20.04 + ROS-Noetic + GTSAM 4.0.2 + Ceres 1.14.0
前面的我都安装过了,但Ceres 我安装的是 2.2.0,现在安装Ceres 1.14.0
sudo apt-get update
sudo apt-get install cmake libgoogle-glog-dev libgflags-dev libatlas-base-dev libeigen3-dev libsuitesparse-dev
wget http://ceres-solver.org/ceres-solver-1.14.0.tar.gz
tar zxf ceres-solver-1.14.0.tar.gz
cd ceres-solver-1.14.0
mkdir build
cd build
cmake ..
make -j4
sudo make install2.数据集下载
3.搭建目录和clone代码
mkdir -p LVI-SAM/src
cd LVI-SAM/src
git clone https://github.com/TixiaoShan/LVI-SAM
cd ..4.修改代码
4.1 CMakeLists.txt 的C++标准改为14:
set(CMAKE_CXX_FLAGS "-std=c++14")第37行后面加入find_package(Boost REQUIRED COMPONENTS timer thread serialization chrono)
4.2

4.3
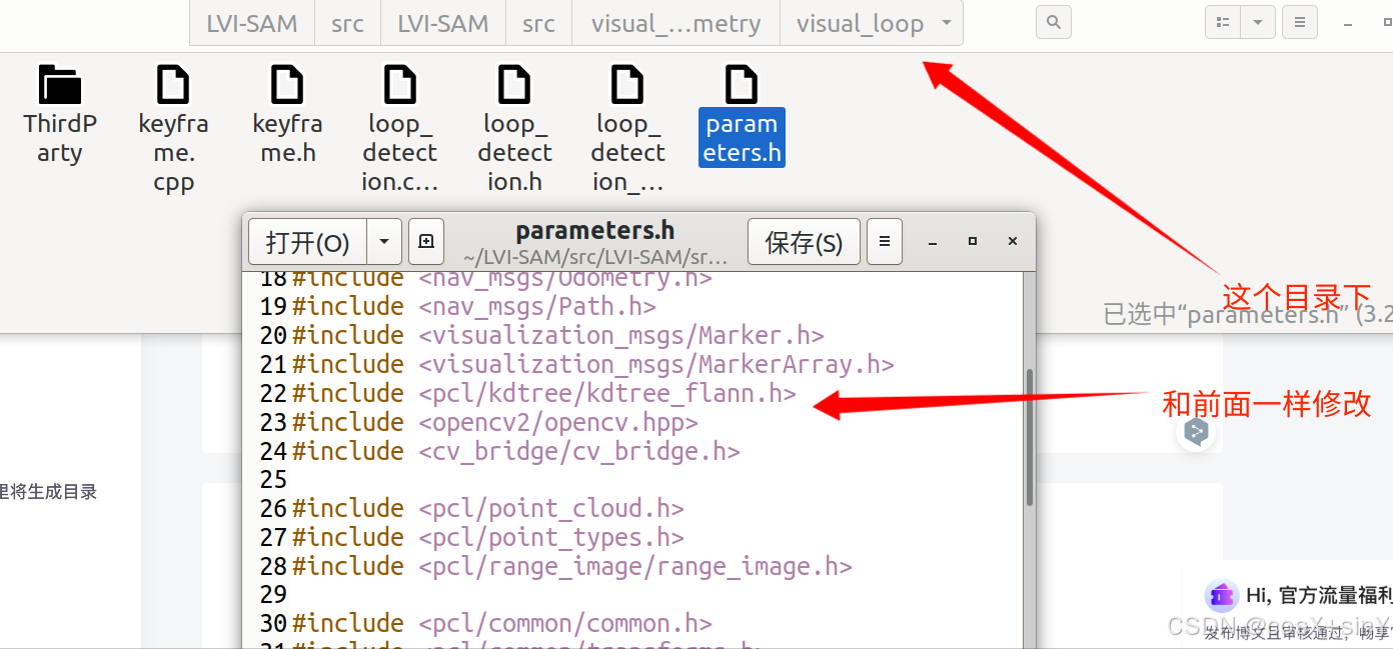
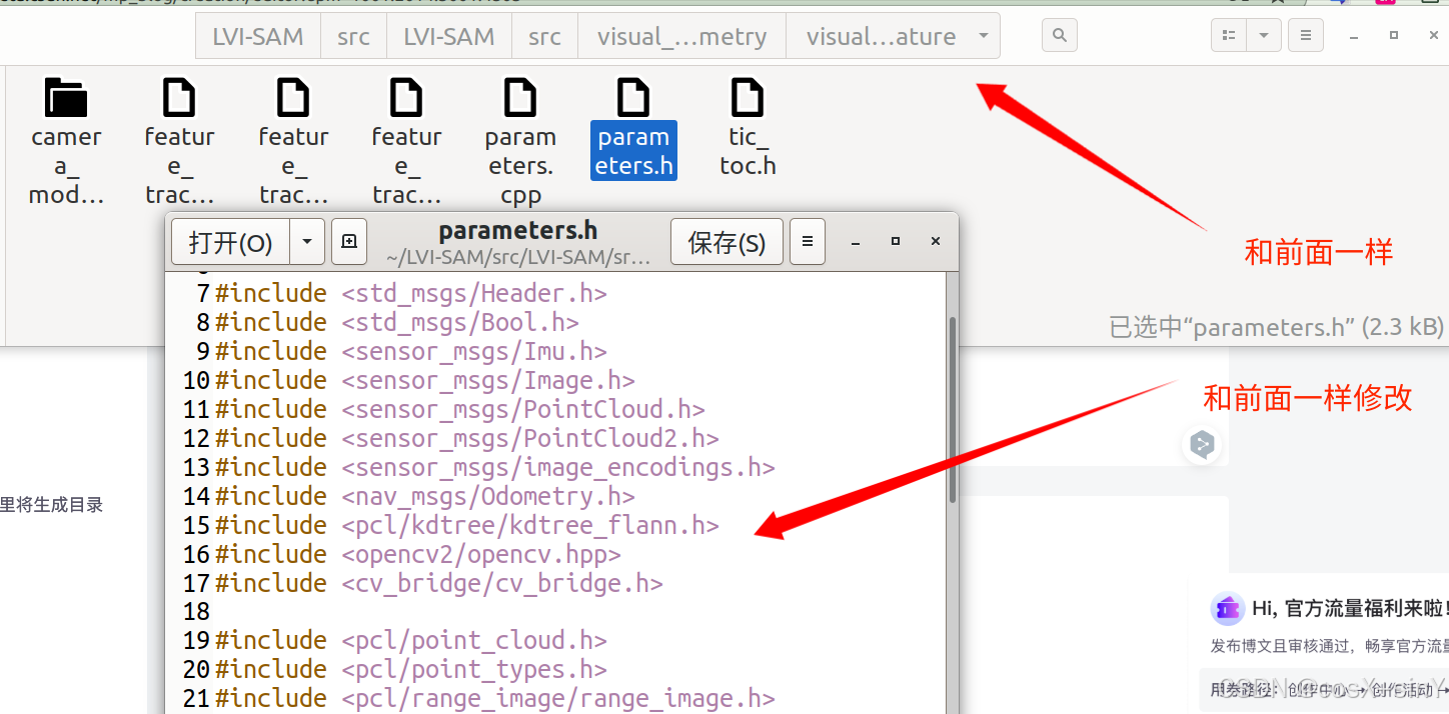
4.4
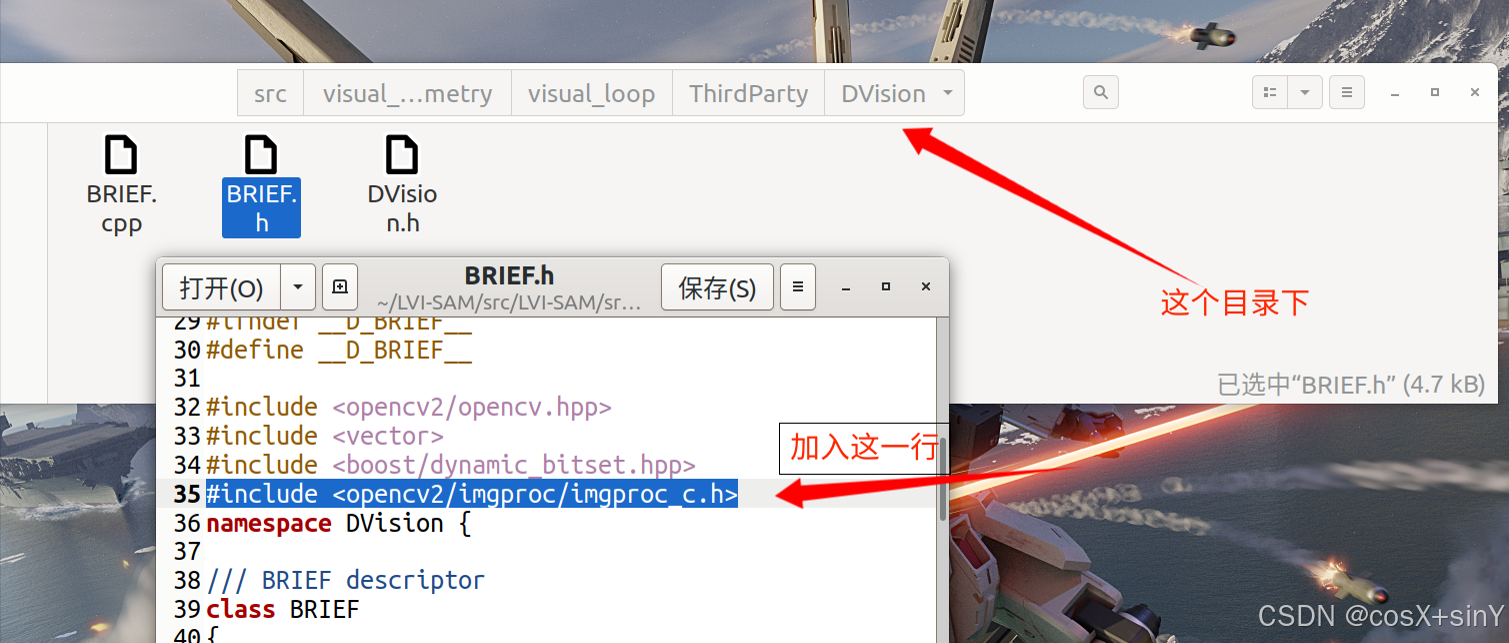
#include <opencv2/imgproc/imgproc_c.h>5.编译
catkin_make -j46.运行launch
source ./devel/setup.bash
roslaunch lvi_sam run.launch7.运行上面下载的数据集
rosbag play handheld.bag8.在RVIZ查看