1 开发目标
1.1 架构图
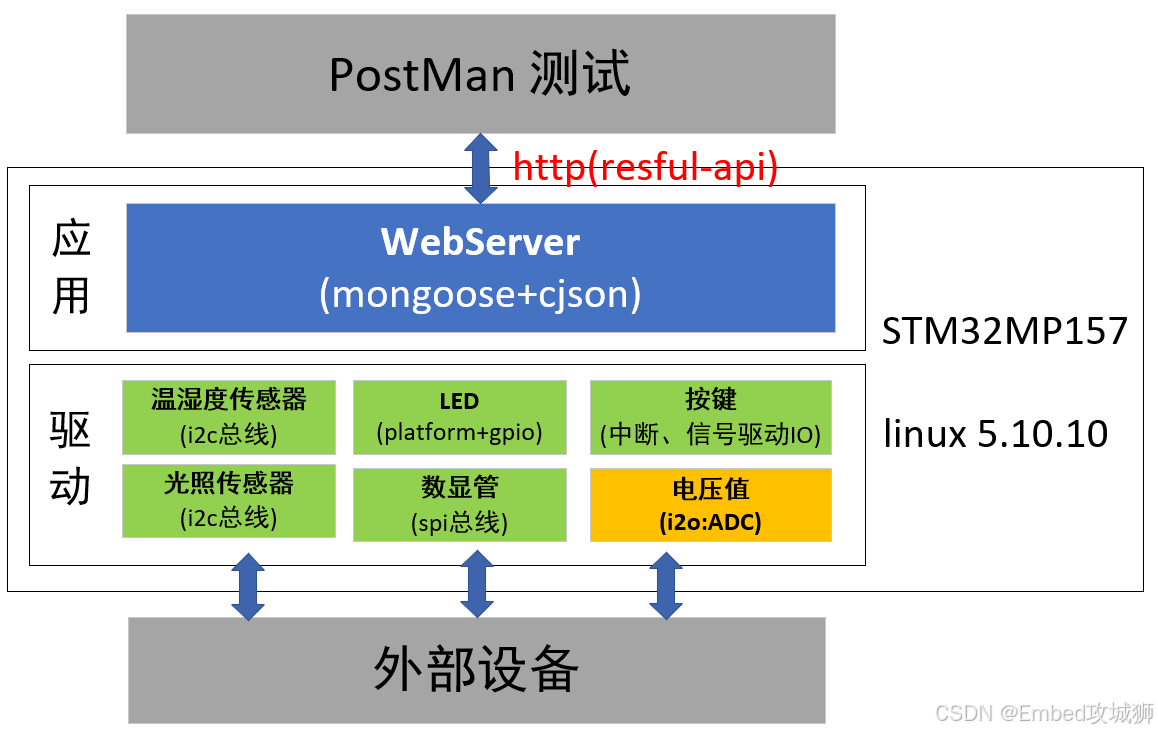
操作系统:基于Linux5.10.10源码和STM32MP157开发板,完成tf-a(FSBL)、u-boot(SSBL)、uImage、dtbs的裁剪;
驱动层:为每个外设配置DTS并且单独封装外设驱动模块。其中电压ADC测试,采用linux内核自带的stm32mp-xx驱动。
应用层:在linux环境下,通过xxx、xxx、xxx使用c语言开发一款WebServer,对内访问驱动获取数据或遥控硬件,向外部用户提供restful api访问接口;
1.2 驱动层功能
|--------|-----------|---------------------------------------------------|------------|--------------------------------|
| 序号 | 驱动名称 | 挂载设备 | 技术点 | 备注 |
| 1 | wd_drv | /dev/wd_drv | i2c总线模型 | 同一总线不同地址 |
| 2 | light_drv | /dev/light_drv | i2c总线模型 | 同一总线不同地址 |
| 3 | led_drv | /dev/led_drv | platform模型 | |
| 4 | dd_drv | /dev/dd_drv | spi总线模型 | |
| 5 | key_drv | /dev/key_drv | io信号驱动 | 阻塞式IO获取中断事件; 根据不同按钮事件开关不同的led灯 |
| 6 | 电压测量 | /sys/bus/iio/devices/iio:device0 /in_voltage1_raw | adc数据采集 | |
1.3 应用层功能
|--------|--------|------------------------------|----------------------------------------------------------------------------------------------------------------|
| 序号 | 名称 | api | api描述 |
| 1 | led1控制 | xx.xx.xx.xx:8080/api/led1 | {"value":true} value的值控制灯的亮/灭 |
| 2 | led2控制 | xx.xx.xx.xx:8080/api/led2 | {"value":false} |
| 3 | 数显管控制 | xx.xx.xx.xx:8080/api/dd_show | {"value":"0-温度"} 显示温度,2位小数 {"value":"1-湿度"} 显示湿度,2位小数 {"value":"2-光照"} 显示光照,整数 {"value":"3-电压值"} 显示电压值,整数,单位mV |
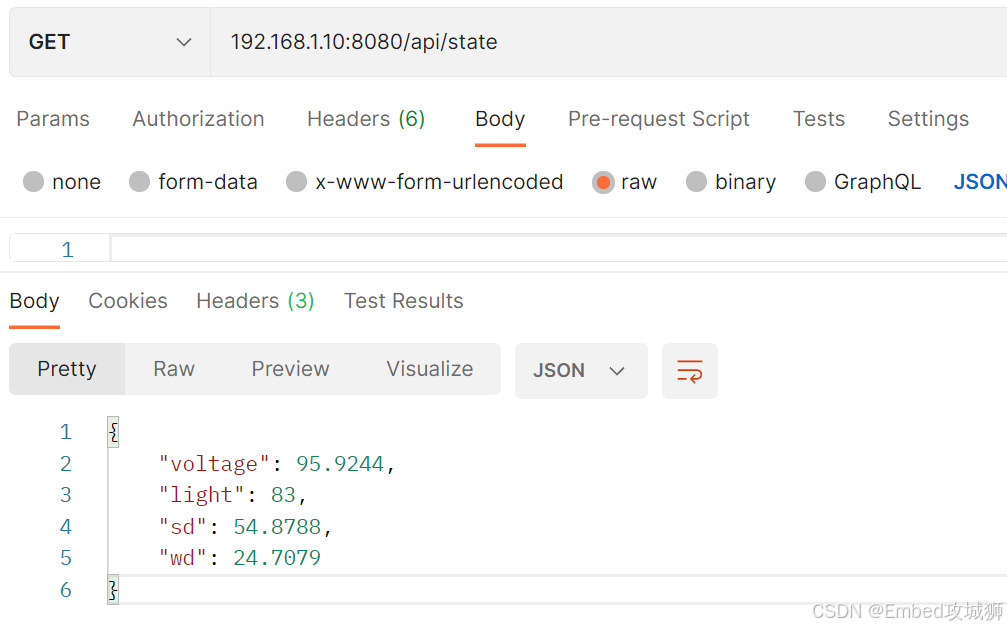
| 4 | 获取测量值 | xx.xx.xx.xx:8080/api/state | 返回值: { "voltage": 95.9244, //电压值,单位mV "light": 83, //光照强度 "sd": 54.8788, //湿度 "wd": 24.7079 //温度 } |
2 效果展示(部分)
2.1 webserver的界面效果

PS:并非通过html/css写的,而是通过mongoose官网编辑器生成: Mongoose官网
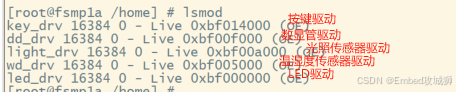
2.2 驱动模块安装列表
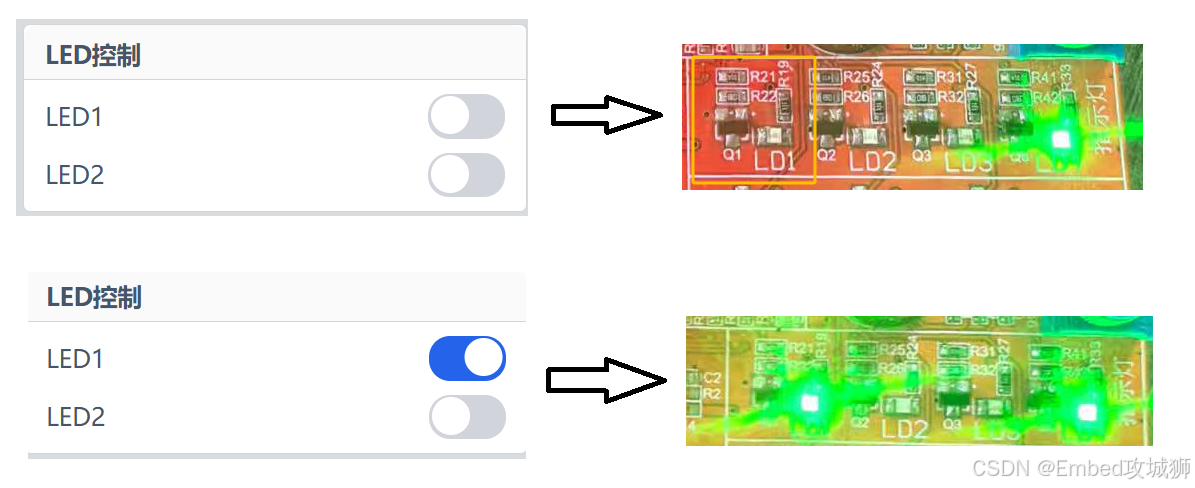
2.3 控制效果展示
(1)在web上,通过点击LED1或LED2的Toggle组件,可以实时控制LED亮灭
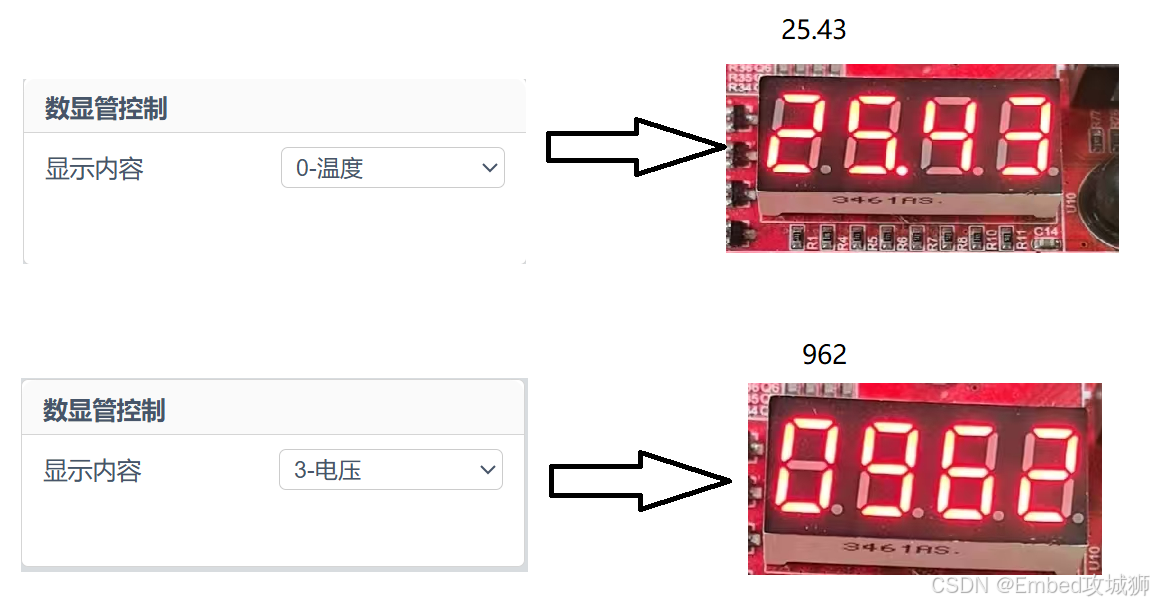
(2)在web上,通过下拉框,可以选择当前数显管显示什么内容(例如:温度和电压)
2.4 postman测试restful-api接口(部分)
3 源码
iot_drivers: 驱动源码(见git)
webserver: webserver源码(见git)
linux设备树配置(部分):
bash
/ {
myled{ //led设备树
compatible = "zr,myled";
led-gpios = <&gpioe 10 0>,<&gpiof 10 0>,<&gpioe 8 0>;
};
mykey{ //按键设备树
interrupt-parent = <&gpiof>;
interrupts=<9 0>,<7 0>,<8 0>;
};
};
//基于I2C总线的 温度度传感器树 和 光照传感器设备树
&i2c1{
pinctrl-names = "default", "sleep";//指定管脚复用的两种不同模式
pinctrl-0 = <&i2c1_pins_b>;//设置默认模式下的管脚复用
pinctrl-1 = <&i2c1_sleep_pins_b>;
i2c-scl-rising-time-ns = <100>;//设置时钟线上升沿的时间
i2c-scl-falling-time-ns = <7>;
status = "okay";//状态设置为OKAY
/delete-property/dmas; //删除无用的属性
/delete-property/dma-names;
mywd@40{
compatible="zr,mywd";
reg=<0X40>;
};
mylight@1e{
compatible="zr,mylight";
reg=<0x1e>;
};
};
//基于spi总线的 数显管设备树
&spi4{
pinctrl-names="default","sleep";
pinctrl-0=<&spi4_pins_b>;
pinctrl-1=<&spi4_sleep_pins_b>;
//添加对片选线管脚的描述
cs-gpios=<&gpioe 11 0>;
status="okay";
mydd@0{
compatible="zr,mydd";
spi-max-frequency = <10000000>;//设置当前spi工作的最大频率为10M
reg=<0>;
};
};
//基于iio的电压采集设备树
&adc {
vdd-supply = <&vdd>;
vdda-supply = <&vdd>;
vref-supply = <&vdd>;
status = "okay";
adc1: adc@0 {
st,adc-channels = <0 1>;
st,min-sample-time-nsecs = <10000>;
status = "okay";
};
};4、待探索问题
(1)基于webserver的websocket的实现
(2)pwm、dma、定时器的输入捕获中断驱动的编写
(3)ADC驱动手动编写