视频讲解:
MuJoCo 机械臂关节路径规划+轨迹优化+末端轨迹可视化(附代码)
今天的实验测试目标就是随机给定两个关节空间位置,使用pyroboplan进行路径规划和轨迹优化,
完整代码仓库:https://github.com/LitchiCheng/mujoco-learning
参考示例:https://github.com/sea-bass/pyroboplan/blob/main/examples/optimize_rrt_path.py
生成start和goal的随机关节空间位置
q_start = self.random_valid_state()
q_goal = self.random_valid_state()使用RRT规划器进行路径规划
planner = RRTPlanner(model, collision_model, options=options)
使用三次多项式轨迹优化器进行优化
optimizer = CubicTrajectoryOptimization(model, collision_model, options)
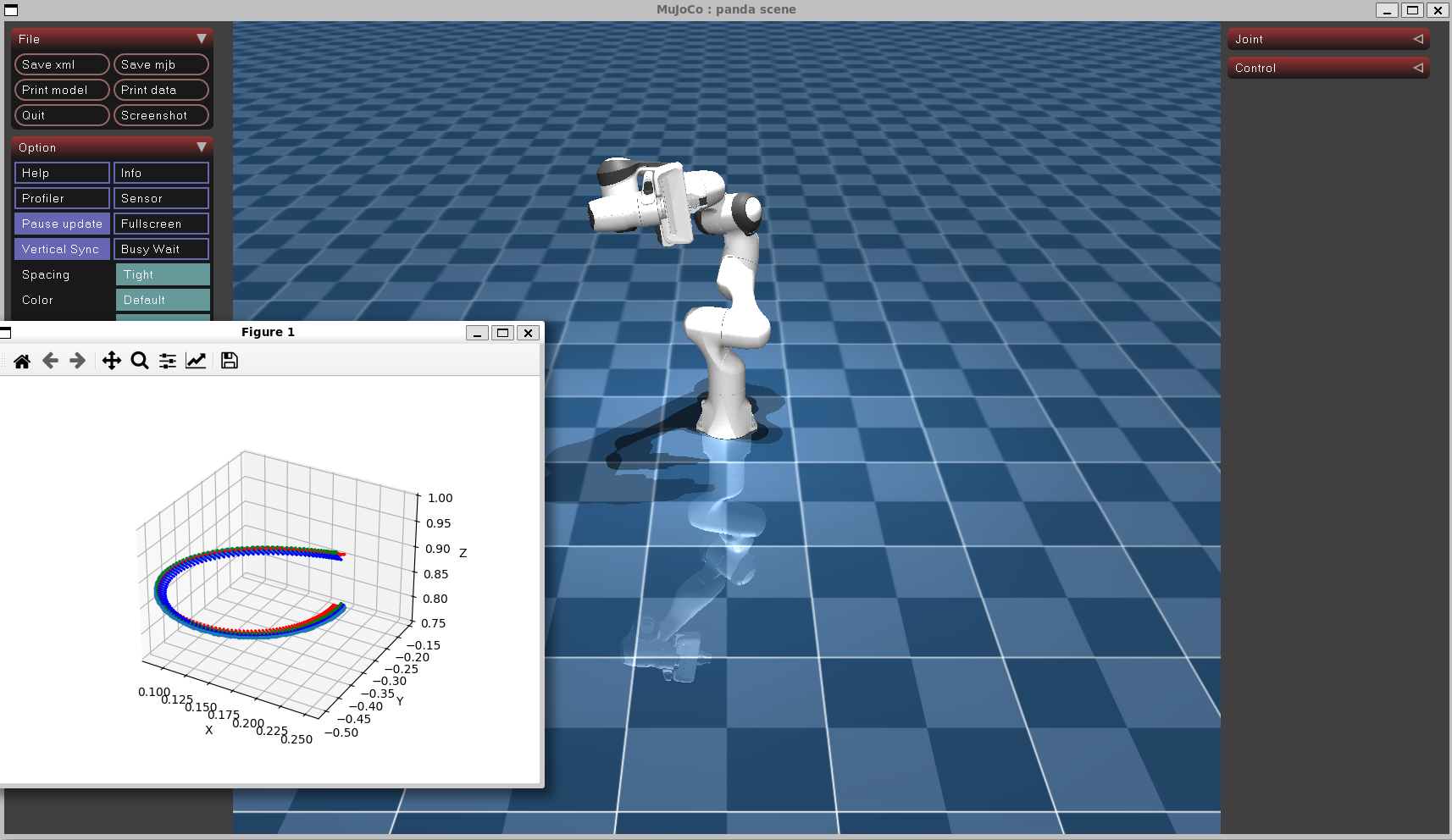
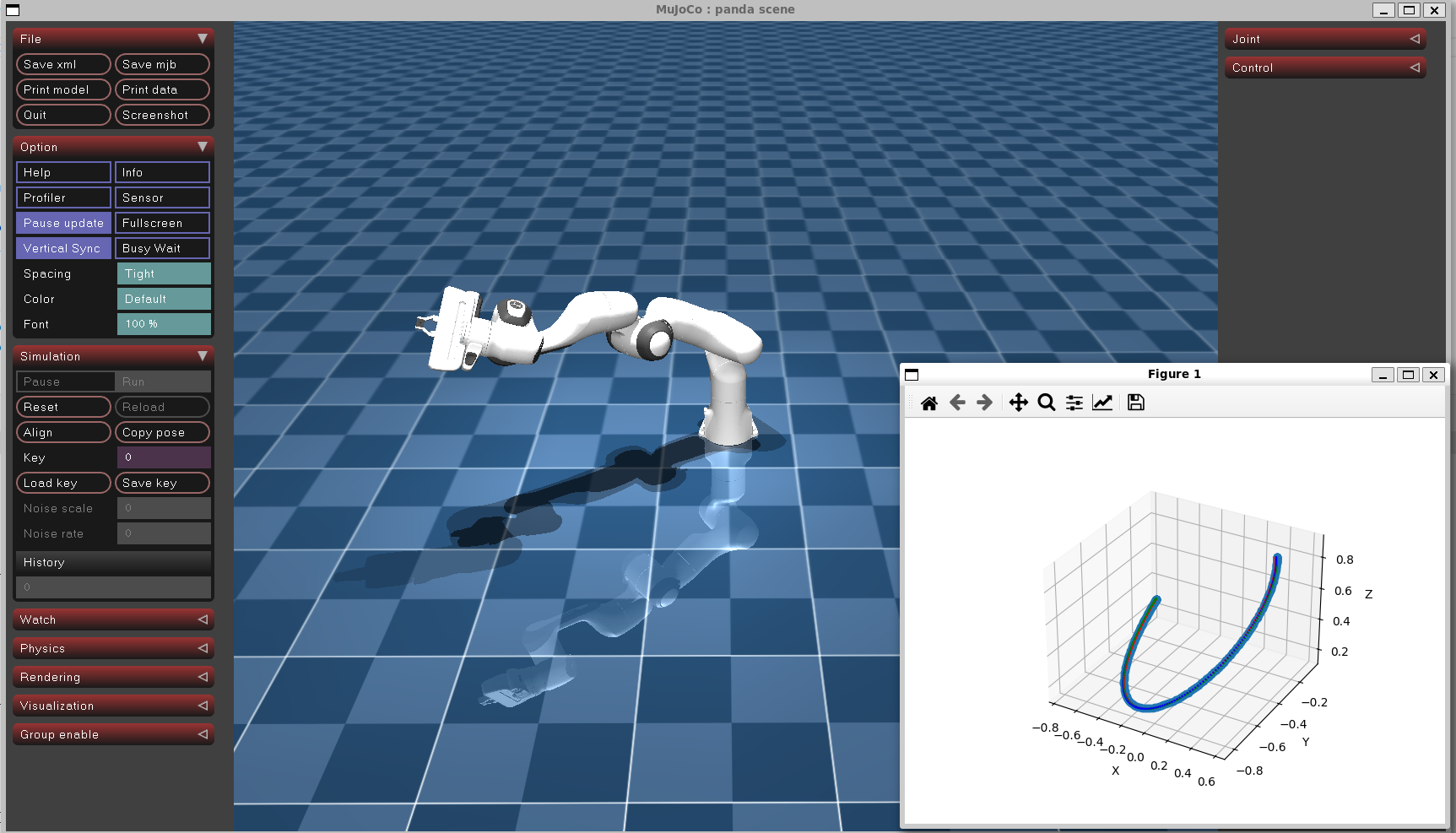
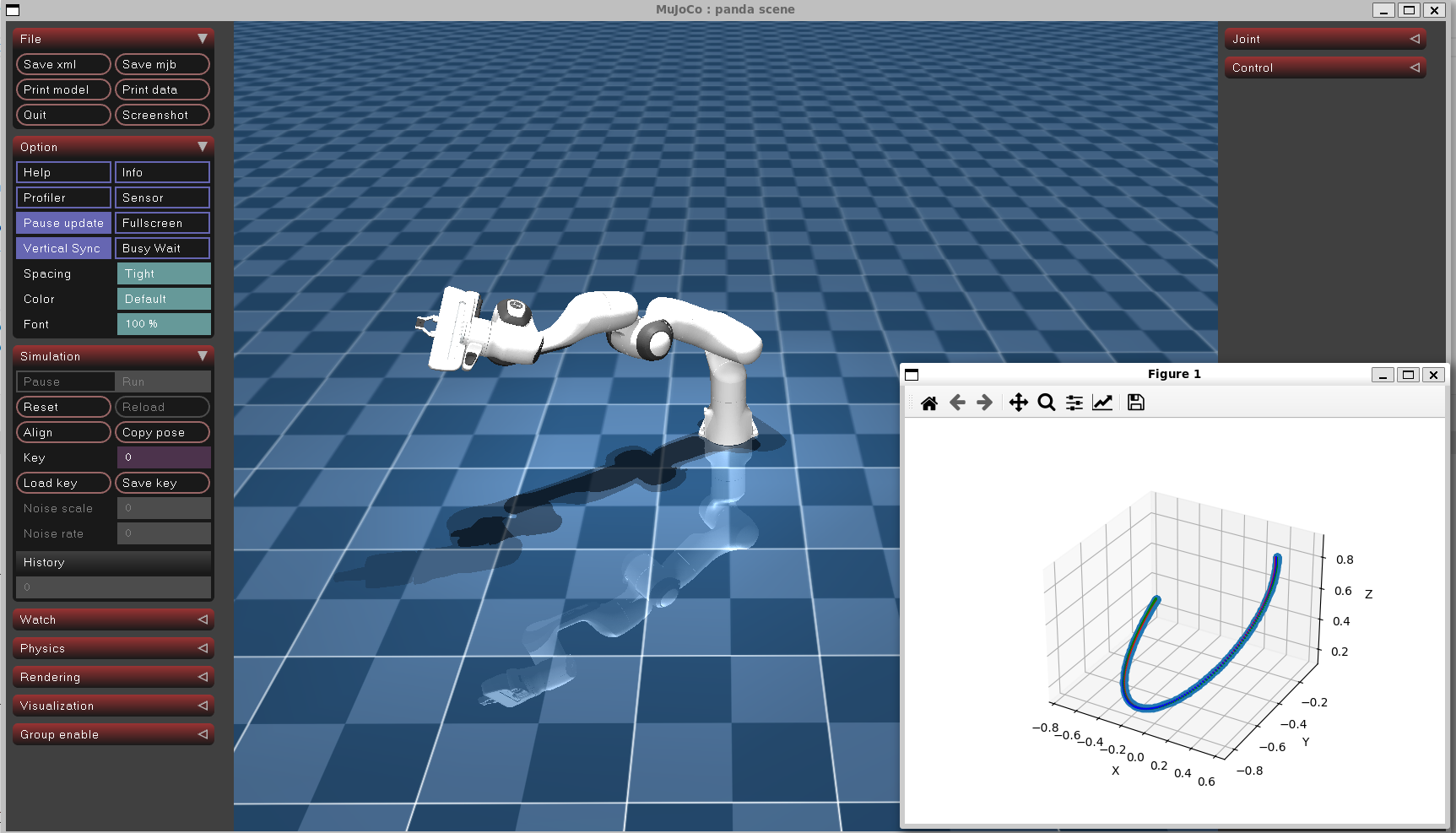
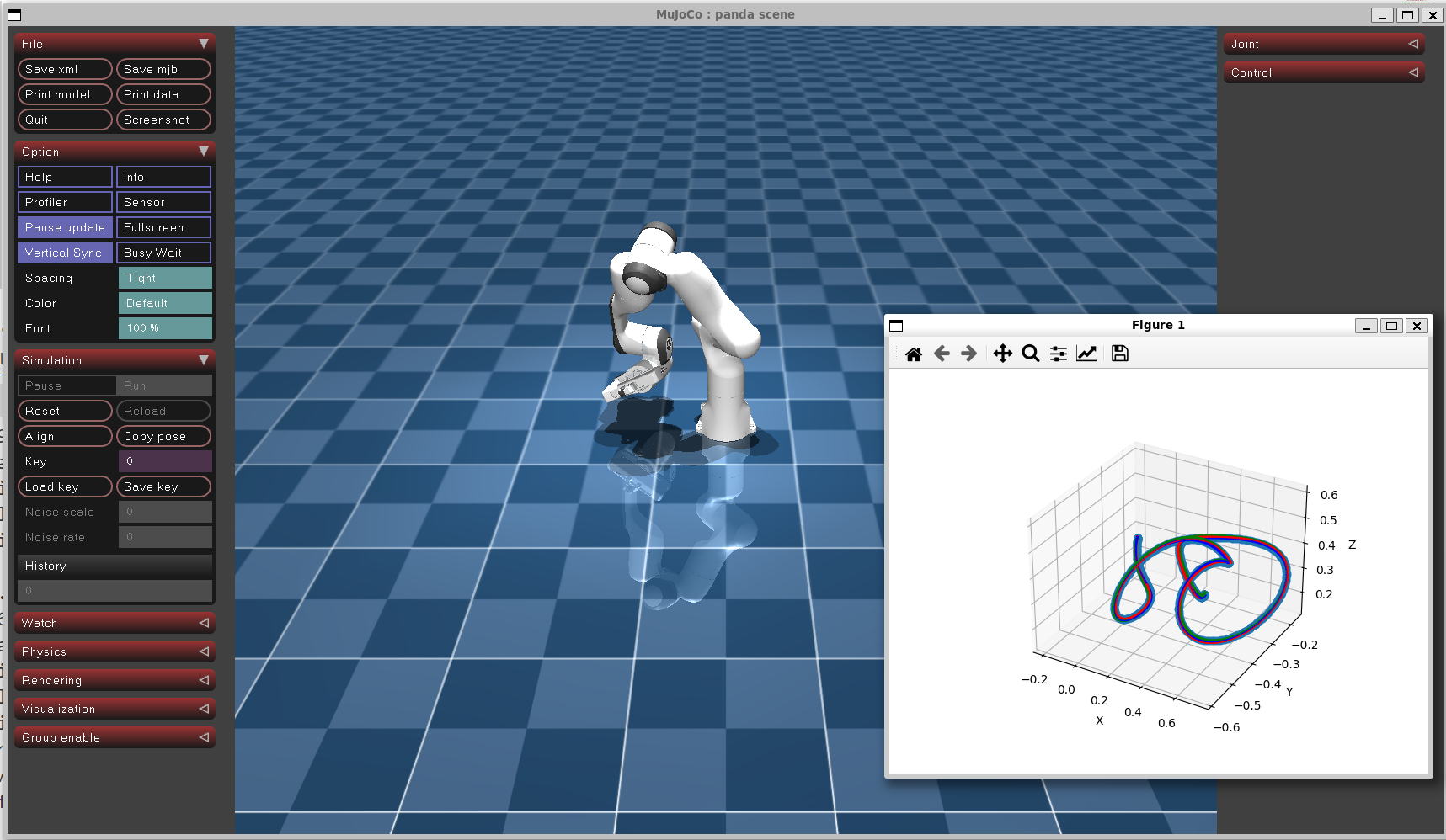
末端轨迹可以用matplotlib画一下
# 提取位置信息
positions = []
for tform in tforms:
position = tform.translation
positions.append(position)
positions = np.array(positions)
# 创建 3D 图形
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 绘制位置轨迹
ax.plot(positions[:, 0], positions[:, 1], positions[:, 2], marker='o')
# 绘制姿态
for i, tform in enumerate(tforms):
position = tform.translation
rotation_matrix = tform.rotation
# 提取坐标轴方向的向量
x_axis = rotation_matrix[:, 0]
y_axis = rotation_matrix[:, 1]
z_axis = rotation_matrix[:, 2]
# 绘制坐标轴向量
ax.quiver(position[0], position[1], position[2],
x_axis[0], x_axis[1], x_axis[2], color='r', length=0.1)
ax.quiver(position[0], position[1], position[2],
y_axis[0], y_axis[1], y_axis[2], color='g', length=0.1)
ax.quiver(position[0], position[1], position[2],
z_axis[0], z_axis[1], z_axis[2], color='b', length=0.1)
# 设置坐标轴标签
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# 显示图形
plt.show(block=False)
plt.pause(0.001)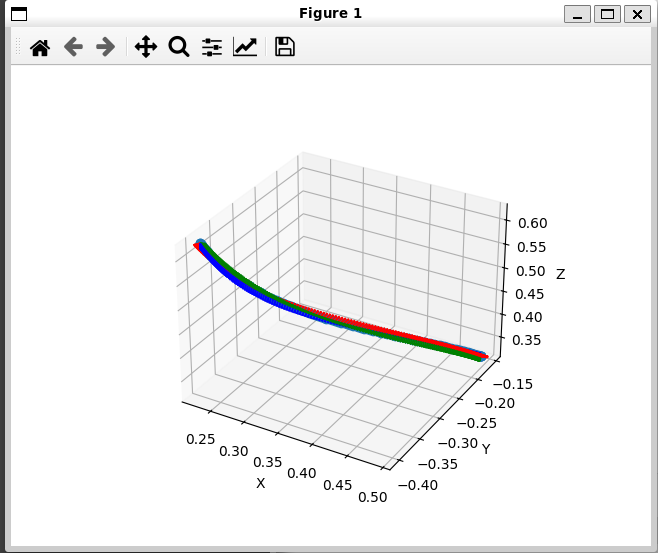
使用mujoco viewer进行仿真的完整代码
import mujoco_viewer
import mujoco,time,threading
import numpy as np
import pinocchio
import matplotlib
# matplotlib.use('TkAgg')
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from pyroboplan.core.utils import (
get_random_collision_free_state,
extract_cartesian_poses,
)
from pyroboplan.models.panda import (
load_models,
add_self_collisions,
add_object_collisions,
)
from pyroboplan.planning.rrt import RRTPlanner, RRTPlannerOptions
from pyroboplan.trajectory.trajectory_optimization import (
CubicTrajectoryOptimization,
CubicTrajectoryOptimizationOptions,
)
class Test(mujoco_viewer.CustomViewer):
def __init__(self, path):
super().__init__(path, 3, azimuth=180, elevation=-30)
self.path = path
def runBefore(self):
# Create models and data
self.model_roboplan, self.collision_model, visual_model = load_models(use_sphere_collisions=True)
add_self_collisions(self.model_roboplan, self.collision_model)
add_object_collisions(self.model_roboplan, self.collision_model, visual_model, inflation_radius=0.1)
data = self.model_roboplan.createData()
collision_data = self.collision_model.createData()
self.target_frame = "panda_hand"
ignore_joint_indices = [
self.model_roboplan.getJointId("panda_finger_joint1") - 1,
self.model_roboplan.getJointId("panda_finger_joint2") - 1,
]
np.set_printoptions(precision=3)
self.distance_padding = 0.001
self.init_state = self.data.qpos.copy()
while True:
q_start = self.random_valid_state()
q_goal = self.random_valid_state()
# Search for a path
options = RRTPlannerOptions(
max_step_size=0.05,
max_connection_dist=5.0,
rrt_connect=False,
bidirectional_rrt=True,
rrt_star=True,
max_rewire_dist=5.0,
max_planning_time=20.0,
fast_return=True,
goal_biasing_probability=0.15,
collision_distance_padding=0.01,
)
print("")
print(f"Planning a path...")
planner = RRTPlanner(self.model_roboplan, self.collision_model, options=options)
q_path = planner.plan(q_start, q_goal)
if len(q_path) > 0:
print(f"Got a path with {len(q_path)} waypoints")
else:
print("Failed to plan.")
# Perform trajectory optimization.
dt = 0.025
options = CubicTrajectoryOptimizationOptions(
num_waypoints=len(q_path),
samples_per_segment=7,
min_segment_time=0.5,
max_segment_time=10.0,
min_vel=-1.5,
max_vel=1.5,
min_accel=-0.75,
max_accel=0.75,
min_jerk=-1.0,
max_jerk=1.0,
max_planning_time=30.0,
check_collisions=True,
min_collision_dist=self.distance_padding,
collision_influence_dist=0.05,
collision_avoidance_cost_weight=0.0,
collision_link_list=[
"obstacle_box_1",
"obstacle_box_2",
"obstacle_sphere_1",
"obstacle_sphere_2",
"ground_plane",
"panda_hand",
],
)
print("Optimizing the path...")
optimizer = CubicTrajectoryOptimization(self.model_roboplan, self.collision_model, options)
traj = optimizer.plan([q_path[0], q_path[-1]], init_path=q_path)
if traj is None:
print("Retrying with all the RRT waypoints...")
traj = optimizer.plan(q_path, init_path=q_path)
if traj is not None:
print("Trajectory optimization successful")
traj_gen = traj.generate(dt)
self.q_vec = traj_gen[1]
print(f"path has {self.q_vec.shape[1]} points")
tforms = extract_cartesian_poses(self.model_roboplan, "panda_hand", self.q_vec.T)
# 提取位置信息
positions = []
for tform in tforms:
position = tform.translation
positions.append(position)
positions = np.array(positions)
# 创建 3D 图形
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 绘制位置轨迹
ax.plot(positions[:, 0], positions[:, 1], positions[:, 2], marker='o')
# 绘制姿态
for i, tform in enumerate(tforms):
position = tform.translation
rotation_matrix = tform.rotation
# 提取坐标轴方向的向量
x_axis = rotation_matrix[:, 0]
y_axis = rotation_matrix[:, 1]
z_axis = rotation_matrix[:, 2]
# 绘制坐标轴向量
ax.quiver(position[0], position[1], position[2],
x_axis[0], x_axis[1], x_axis[2], color='r', length=0.01)
ax.quiver(position[0], position[1], position[2],
y_axis[0], y_axis[1], y_axis[2], color='g', length=0.01)
ax.quiver(position[0], position[1], position[2],
z_axis[0], z_axis[1], z_axis[2], color='b', length=0.01)
# 设置坐标轴标签
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# 显示图形
plt.show(block=False)
plt.pause(0.001)
break
self.index = 0
def random_valid_state(self):
return get_random_collision_free_state(
self.model_roboplan, self.collision_model, distance_padding=0.01
)
def runFunc(self):
self.data.qpos[:7] = self.q_vec[:7, self.index]
self.index += 1
if self.index >= self.q_vec.shape[1]:
self.index = 0
time.sleep(0.01)
if __name__ == "__main__":
test = Test("/home/dar/MuJoCoBin/mujoco_menagerie/franka_emika_panda/scene.xml")
test.run_loop()