驾驶场景仿真平台核心功能
一、场景搭建与编辑
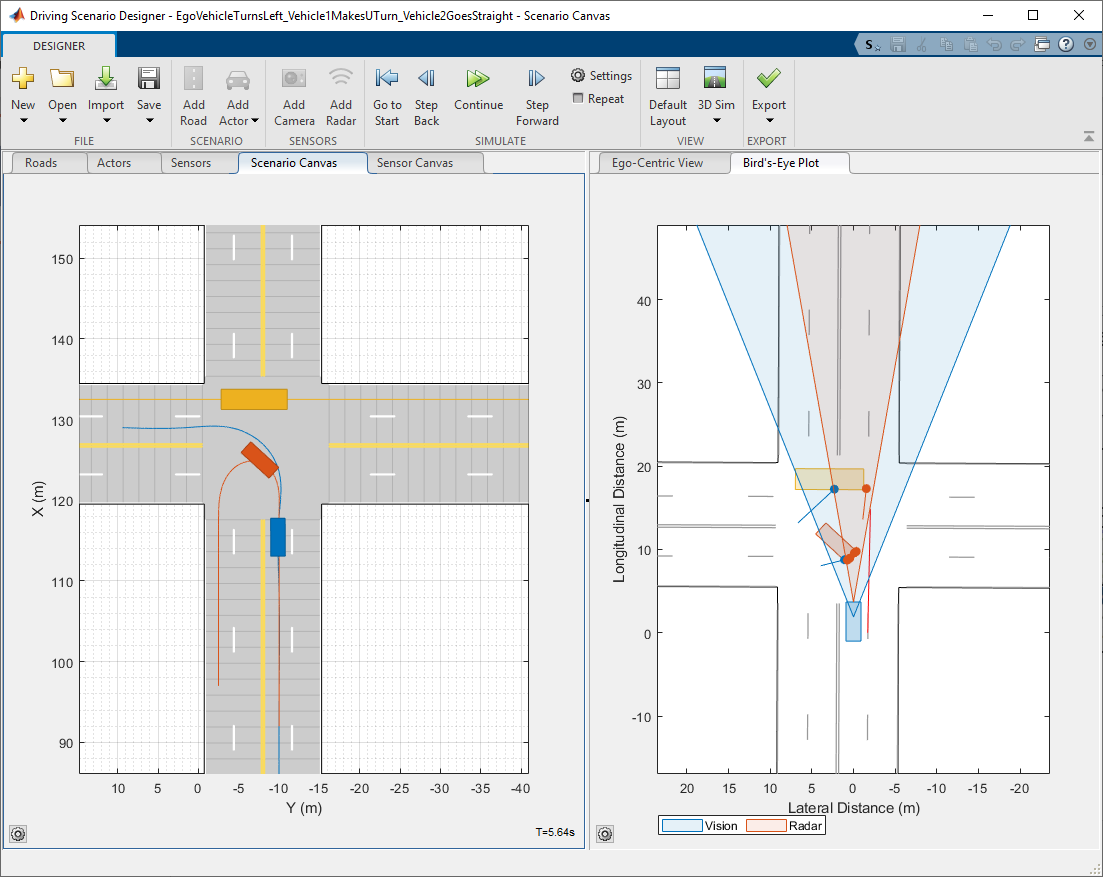
- 可视化场景构建
- 使用拖放界面创建道路网络和角色模型(车辆、行人等)
- 支持欧洲新车评估计划(Euro NCAP)测试协议及其他预置场景模板
二、传感器配置
- 车载传感器系统
- 支持配置视觉摄像头、雷达、激光雷达、惯性导航系统(INS)、超声波传感器
- 可生成:
▪️ 目标检测(角色/车道边界)
▪️ 点云数据
▪️ 惯性测量数据
三、数据导入功能
- 道路网络导入
- 支持格式:
▪️ ASAM OpenDRIVE(版本1.4/1.5/1.6)
▪️ OpenStreetMap
▪️ HERE高清实时地图
▪️ Zenrin日本地图API 3.0(需安装专用导入工具)
- 支持格式:
四、数据导出功能
- 多格式导出支持
- 道路网络导出为:
▪️ ASAM OpenDRIVE(版本1.4/1.5/1.6)
▪️ RoadRunner HD Map格式 - 场景元素导出为:
▪️ ASAM OpenSCENARIO 1.0格式(含角色与轨迹) - 传感器数据导出至MATLAB
- 道路网络导出为:
五、开发集成
-
代码生成与扩展
- 生成场景和传感器的MATLAB代码,支持二次开发
- 自动生成Simulink测试模型,用于:
▪️ 传感器融合算法验证
▪️ 车辆控制算法测试
-
工具链互通
- 支持与RoadRunner场景编辑器双向交互
- 可自动导入当前场景至RoadRunner进行编辑
典型工作流程
- 创建/导入道路网络 → 2. 配置传感器系统 → 3. 生成仿真数据 →
- 导出至MATLAB/Simulink → 5. 算法验证 → 6. 迭代优化
该平台提供从场景搭建到算法验证的完整闭环仿真解决方案,适用于ADAS系统开发、自动驾驶算法测试及标准合规性验证(如Euro NCAP)。