3.2.1 生成数据集
python
%matplotlib inline
import random
import torch
from d2l import torch as d2l
def synthetic_data(w, b, num_examples):
# 生成特征矩阵X,形状为(num_examples, len(w)),符合标准正态分布
X = torch.normal(0, 1, (num_examples, len(w)))
# 计算标签y = Xw + b
y = torch.matmul(X, w) + b
# 添加均值为0、标准差为0.01的噪声
y += torch.normal(0, 0.01, y.shape)
# 将y转换为列向量(形状:num_examples × 1)
return X, y.reshape((-1, 1))
python
true_w = torch.tensor([2, -3.4]) # 定义真实权重
true_b = 4.2 # 定义真实偏置
features, labels = synthetic_data(true_w, true_b, 1000) # 生成1000个样本
d2l.set_figsize()
d2l.plt.scatter(features[:, 1].detach().numpy(), labels.detach().numpy(), 1)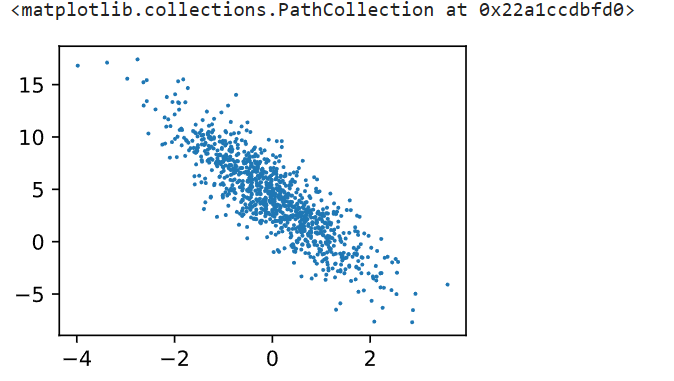
features:, 1: 选取所有样本的第二个特征(索引为1的列)。
3.2.1 读取数据集
python
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
random.shuffle(indices)
for i in range(0, num_examples, batch_size):
batch_indices = torch.tensor(
indices[i: min(i + batch_size, num_examples)])
yield features[batch_indices], labels[batch_indices]
batch_size = 10
for X, y in data_iter(batch_size, features, labels):
print(X, '\n', y)
breaktensor(\[ 1.6556, 0.1851,
-1.4880, 0.0684,
1.0536, 0.9818,
-0.7794, -1.9199,
-0.3383, 0.2244,
-0.2260, 3.1530,
-2.3626, 1.1877,
-0.3301, 0.1781,
-0.6136, -1.2974,
-0.3397, -0.2088])
tensor(\[ 6.8888,
0.9887,
2.9757,
9.1748,
2.7541,
-6.9671,
-4.5522,
2.9436,
7.3728,
4.2270])