视频讲解:
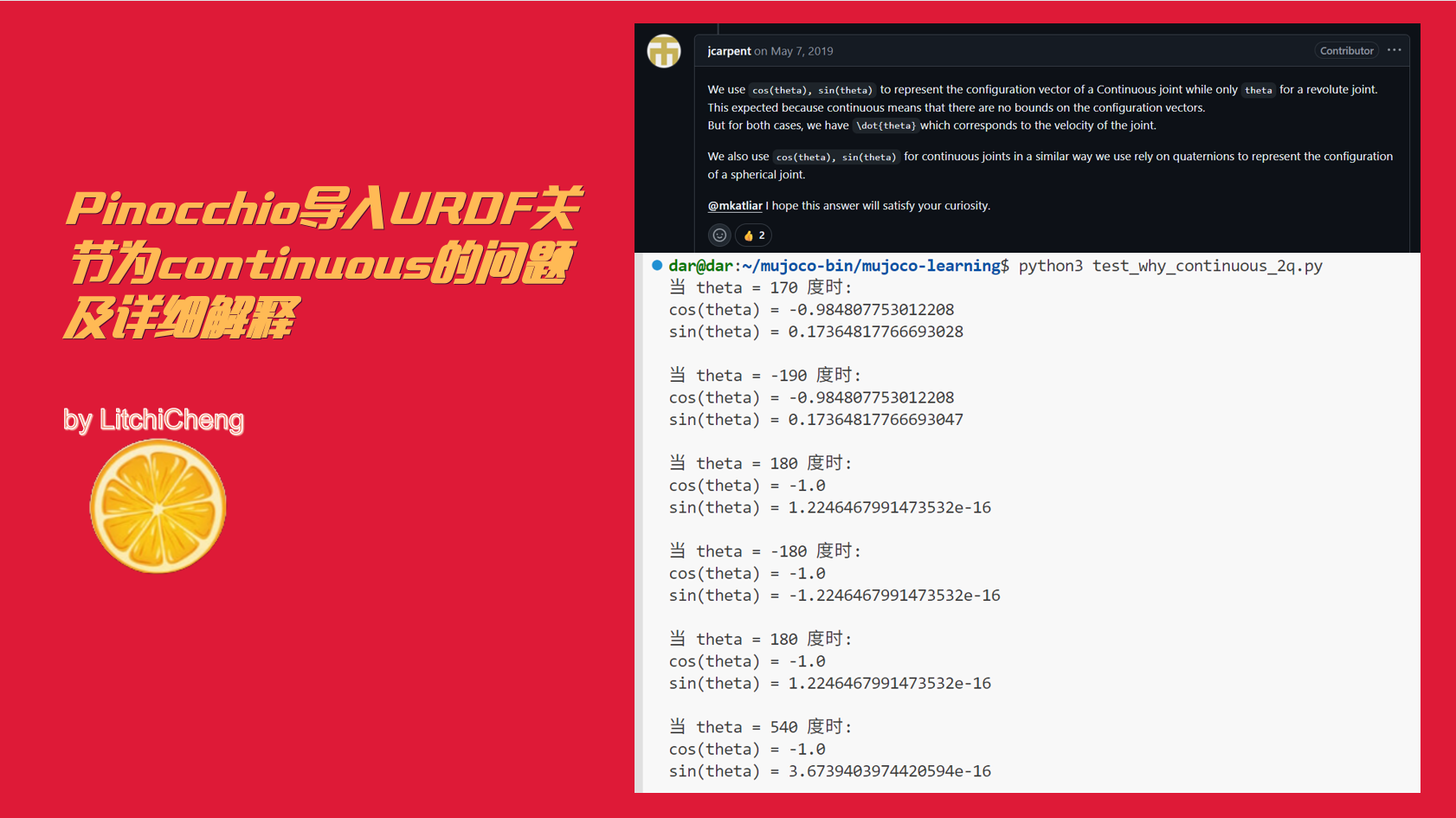
Pinocchio导入URDF关节为continuous的问题及详细解释
仓库地址:GitHub - LitchiCheng/mujoco-learning
问题背景:打算测试将之前的panda的urdf换成so-arm100的urdf,发现pinocchio的代码不能用,很奇怪,按照道理都是参数,应该可以直接复用,通过排查,发现时model.nq数量发生了变化,pyroboplan的代码在进行ik时直接越界了
<joint
name="Shoulder_Rotation"
type="continuous">
<origin
xyz="0 -0.0452 0.0181"
rpy="1.5708 0 1.5708" />
<parent
link="Base" />
<child
link="Shoulder_Rotation_Pitch" />
<axis
xyz="0 1 0" />
</joint>进一步排查:
1.打印panda的model.nq发现和urdf中的关节数量一致,其type为revolute
2.打印so-arm100的model.nq发现比urdf中的joint多了一倍,其type为continuous
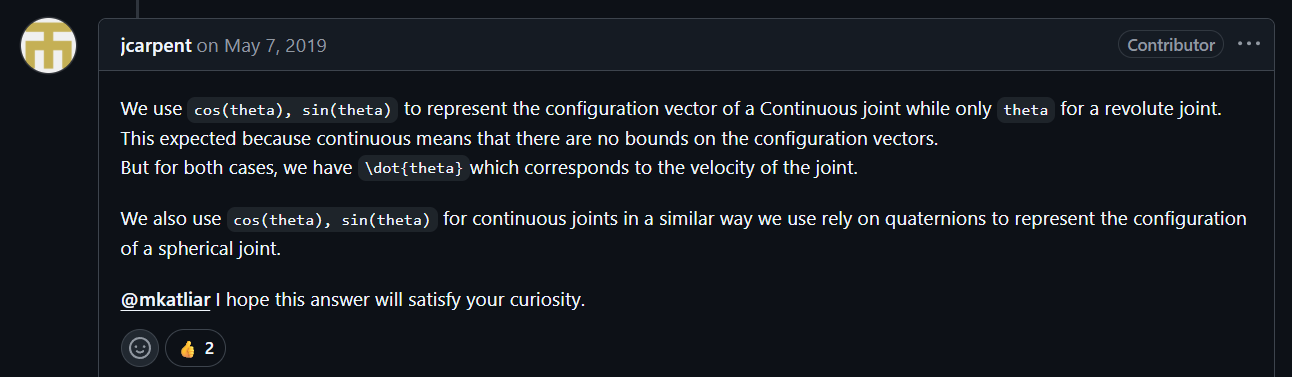
通过查看pinocchio的issues,发现如下两个解释:
Continuous joint in URDF adds 2 elements to the configuration space · Issue #794 · stack-of-tasks/pinocchio · GitHub
lowerPositionLimit and upperPositionLimit in pinocchio::Model have unexpected dimensions for unbounded joints - how to read them correctly? · Issue #777 · stack-of-tasks/pinocchio · GitHub
但实际上还没没有讲得很清楚为什么continous类型的joint的nq为2,这里进行探究:
URDF的continuous joint:本质也是一种无旋转角度限制的旋转关节(unbounded revolute joint),理论上应使用单个角度参数θ描述其状态就够了,但是为什么需要用两个,这就要反过来思考了,首先1个配置空间的维度能不能用来描述continuous类型关节对应物理位置,肯定是够了,但会出现一种情况,如关节在θ时和θ+2Π实际上物理位置一致,有无数个数值对应同样的物理位置,对于优化、求解问题来说时冗余的
所以用从如下两个角度可以理解cosθ, sinθ的好处:
1.一个数值对对应了一个物理状态,避免求解的冗余问题
2.cosθ和sinθ避免2Π到0的跳跃
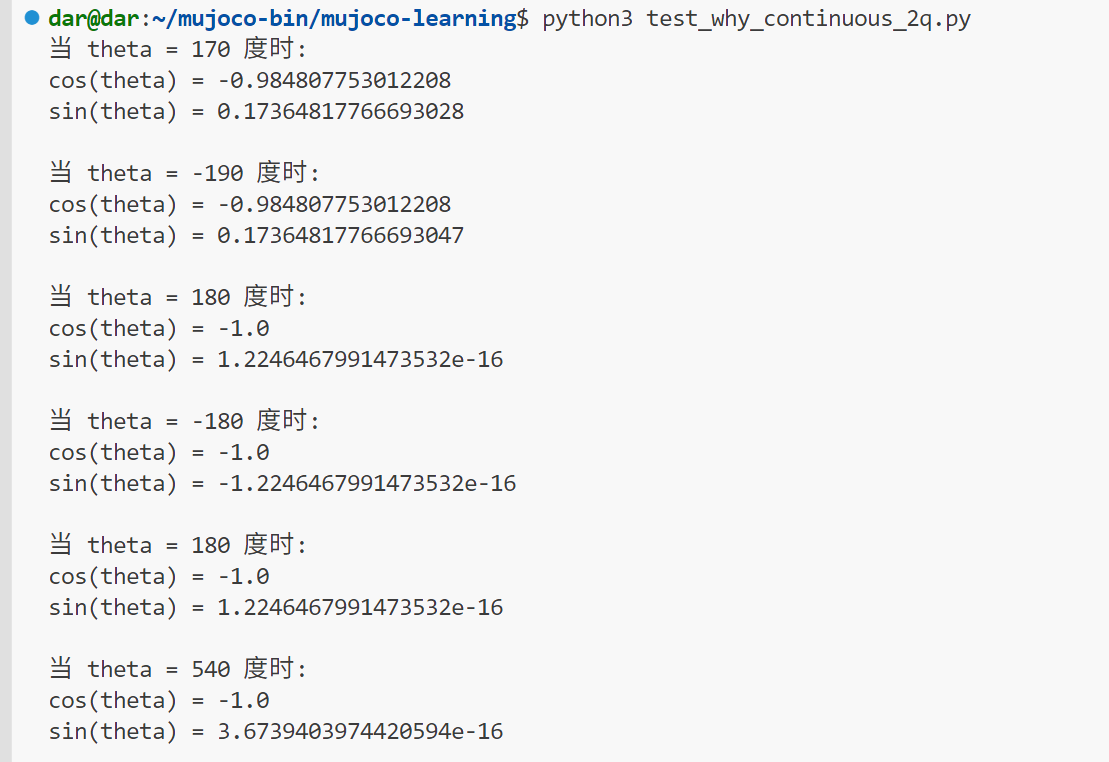
下面用python代码来做一个验证
import math
# 定义角度
angles = [170, -190, 180, -180, 180, 540]
# 遍历角度列表
for theta in angles:
# 将角度转换为弧度
theta_rad = math.radians(theta)
# 计算 cos 和 sin 值
cos_theta = math.cos(theta_rad)
sin_theta = math.sin(theta_rad)
# 输出结果
print(f"当 theta = {theta} 度时:")
print(f"cos(theta) = {cos_theta}")
print(f"sin(theta) = {sin_theta}")
print()可以看到三种情况下数值对均一致
1.170和反方向
2.180°和反向180
3.180和多转一圈