25年4月来自UC Berkeley、北大、USC、UMich、UIUC、Stanford、CMU、UCLA 和 北京通用 AI 研究院(BIGAI)的论文"ROBOVERSE: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning"。
数据扩展和标准化评估基准,推动了自然语言处理和计算机视觉领域的重大进步。然而,机器人技术在数据扩展和建立可靠的评估协议方面面临着独特的挑战。收集现实世界的机器人数据资源密集且效率低下,而在现实世界场景中进行基准测试仍然非常复杂。合成数据和仿真提供了有前景的替代方案,但现有的努力往往在数据质量、多样性和基准标准化方面存在不足。为了应对这些挑战,ROBOVERSE 是一个包含仿真平台、合成数据集和统一基准的综合框架。其仿真平台支持多个模拟器和机器人实例,可实现不同环境之间的无缝转换。合成数据集具有高保真物理和照片级渲染效果,是通过多种方法构建的,包括从公共数据集迁移、策略部署和运动规划等,并通过数据增强技术进行增强。此外,还提出用于模仿学习和强化学习的统一基准,从而能够在不同泛化水平上进行一致的评估。仿真平台的核心是 METASIM,这是一个将不同的仿真环境抽象为通用接口的基础架构。它将现有的模拟环境重构为一个与模拟器无关的配置系统,并提供一个 API 来协调不同的模拟器功能,例如启动模拟环境、加载具有初始状态的资源、步进物理引擎等。这种抽象确保了互操作性和可扩展性。实验表明,ROBOVERSE 能够提升模拟学习、强化学习和世界模型学习的性能,从而改善从模拟-到-现实的迁移。
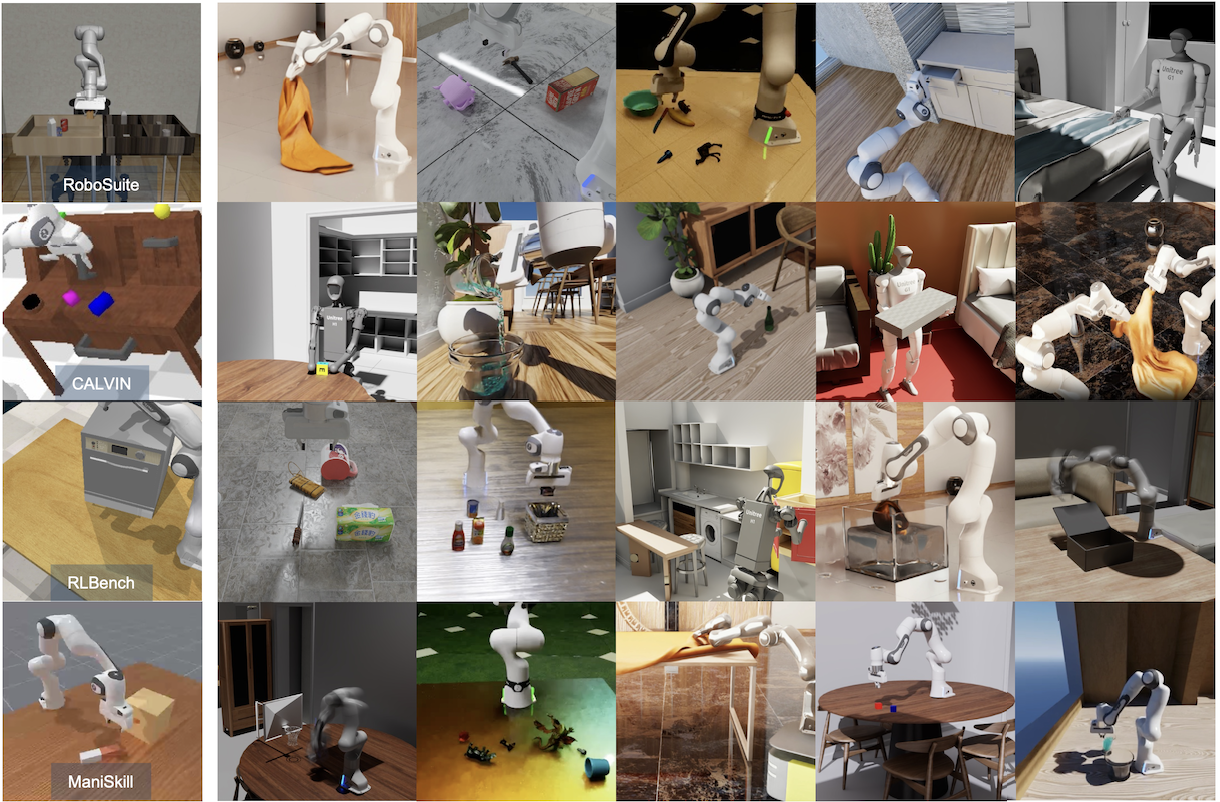
ROBOVERSE 如图所示:
基准测试仍然是机器人领域一个关键且极具挑战性的问题。与监督学习任务相比,评估机器人模型的性能相对困难。Meta-World 134 是多任务基准测试的早期尝试。紧随其后的是 RLBench 48、BEHAVIOR-1K 63、Habitat 111 和 ManiSkill 84, 37, 112, 107,涵盖了各种各样的机器人任务。Grutopia 120 和 InfiniteWorld 100 向通用机器人基准测试迈出了一步。尽管研究人员为这些基准测试付出了巨大的努力,但并不能保证结果在不同的基准测试中具有可重复性。不确定性来自多个方面,包括模拟精度、渲染风格和资产属性 66, 26。
为了充分发挥机器人仿真的潜力, 构建 ROBOVERSE 这个可扩展的仿真平台,它将现有的模拟器统一在一个标准化的格式、单一的基础设施、大规模的合成数据集和统一的基准测试下。为此,ROBOVERSE 的核心基础设施是METASIM。通过设计,METASIM 为智体、目标、传感器、任务和物理参数建立一个通用的配置系统,同时提供了一个与模拟器无关的模拟设置和控制接口。该架构能够以最小的适应性工作,无缝集成来自不同模拟环境的任务、资产和机器人轨迹。
在 ROBOVERSE 中,构建了迄今为止规模最大、种类最全的高质量合成数据集和基准测试集,并采用统一的格式。该数据集包含约 50 万条独特的高保真轨迹,涵盖 276 个任务类别和约 5.5 万个素材。此外,还生成了超过 5000 万个高质量的状态转换,以支持策略学习。
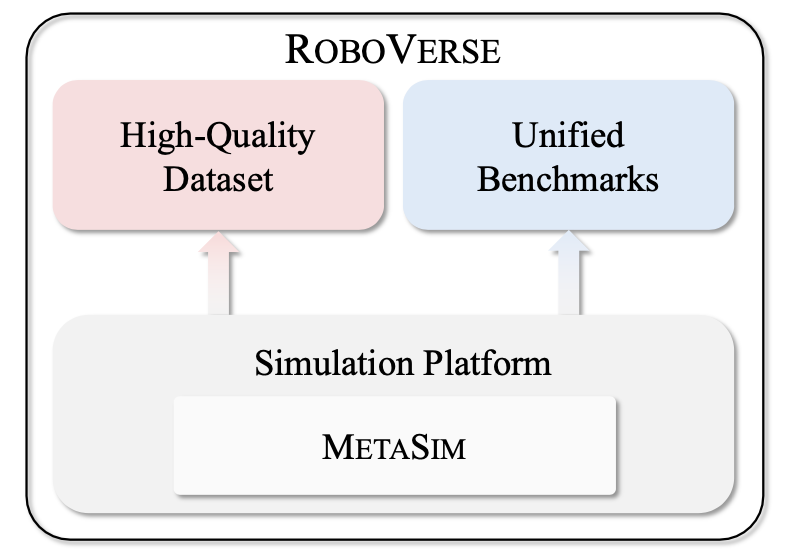
METASIM 概述
METASIM,是特定仿真环境实现之上的高级接口。它也是 ROBOVERSE 的核心基础设施。如图所示,METASIM 为 ROBOVERSE 仿真平台提供支持,使其能够生成大规模高质量数据集,并构建统一的基准测试。
METASIM 实现
如图所示,METASIM 采用三层架构,包括通用配置系统、与模拟器无关的接口和用户友好的环境包装器。通用配置系统统一了仿真场景的规范,并确保不同模拟器的格式一致。与模拟器无关的接口解释这些规范,将其转换为特定于模拟器的命令,从而协调不同的模拟器后端。此外,环境包装器将与模拟器无关的接口封装到标准化的学习环境中,例如 Gym 115 环境。
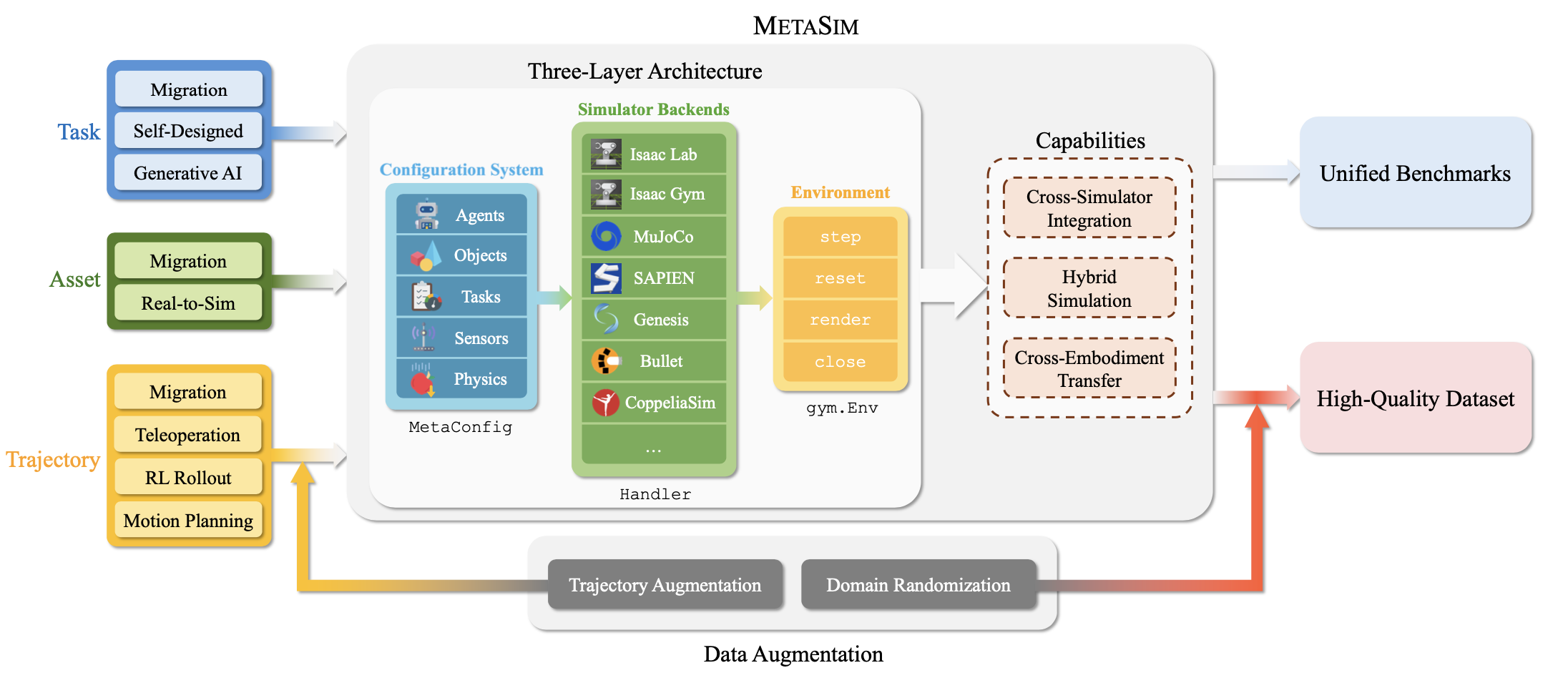
1)通用配置系统:一个典型的模拟环境包含智体、目标、任务、传感器和物理参数。它们共同定义了谁执行动作(智体)、环境是什么样子(目标)、智体应该做什么(任务,包括指令、成功指标和奖励)、环境如何被感知和测量(传感器)以及控制物理定律(物理参数)。理想情况下,这些组件应该与模拟器无关,需要统一的模拟场景标准。这样的标准将使研究人员能够无缝地跨不同的模拟器工作,并通过跨模拟集成社区现有的工作。
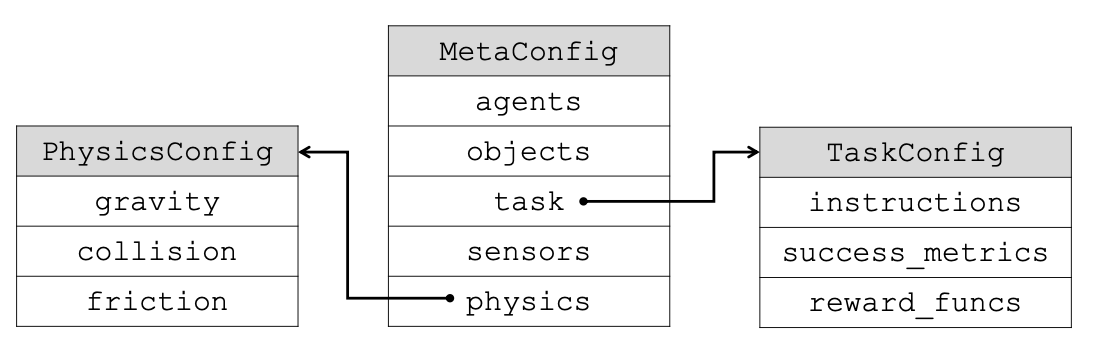
基于这一原则,设计一个配置系统 MetaConfig,以与模拟器无关的方式抽象模拟场景。如图所示,MetaConfig 是一个嵌套类,包含上述核心组件。它可以被不同的模拟器后端解释,从而构建相应的模拟。此外,MetaConfig 支持可选的模拟器特定超参数(例如,求解器类型),从而允许通过定制充分利用不同模拟器的独特功能。
2)统一的模拟器后端:不同的模拟器有各自的实现和专业化。然而,常规操作(例如初始化场景、加载目标、单步运行物理引擎、检索观测值、时间管理和确定成功状态)往往遵循相似的模式。为了标准化这些共享操作,通过 Handler 类创建了一个统一的接口。每个模拟器都有自己的处理程序实例来实现此接口。处理程序类实现了涵盖模拟任务整个生命周期的通用方法,包括 launch()、get_states() 和 set_states() 等。 API 的使用方法已在如下代码 中演示。

- 用户友好的环境包装器:Gym 115 是强化学习和机器人技术中广泛采用的范例,其中 gym.Env 类是构建学习环境的基础。定义一个包装器,可以轻松地将 Handler 转换为配备 Gym API(step()、reset()、render() 和 close())的环境。如上述代码例子所示,这些方法是通过利用底层 Handler 的方法来实现的。
METASIM 功能
METASIM 提供以下三大关键功能。
- 跨模拟器集成:在不同模拟器之间无缝切换,允许将一个模拟器中的任务和轨迹应用于其他模拟器。此功能可实现高效的任务和轨迹集成、统一的基准测试构建以及用于强化学习训练的模拟器间迁移。例如,Isaac Gym 75 可以使用 Meta-World 134 中的任务进行快速并行训练,之后生成的轨迹可部署到 Isaac Sim 88 中进行渲染。
- 混合模拟:METASIM 支持同时结合一个模拟器的物理引擎和另一个模拟器的渲染器,使用户能够充分利用不同模拟器的优势。具体来说,只需一个命令,就可以启动一个带有强大渲染器的模拟器(例如 Isaac Sim 88),并与一个带有精确物理引擎的模拟器(例如 MuJoCo 114)连接,形成更强大的模拟,从而生成高质量的数据。
3)跨实体迁移:通过重定位末端执行器的姿态,在不同的基于夹持器的机器人形态上重用轨迹,从而将从不同机器人收集的数据集成为统一的格式。
ROBOVERSE 数据集概述
在 METASIM 的基础上,结合多种数据收集方法,生成大规模高质量数据集。总体而言,需要收集三种关键数据类型:任务、资产和机器人轨迹。这些数据的主要来源是从现有模拟环境中迁移。除了迁移之外,还探索各种数据收集方法,例如使用大语言模型生成新任务,利用 Real-to-Sim 工具集 71 从现实世界重建资产,使用遥操作收集新轨迹等。此外,还利用数据增强方法进行轨迹和视觉观察。最后,给出 ROBOVERSE 中数据迁移的当前进度统计数据。
任务、资产和轨迹收集:迁移
利用 ROBOVERSE 的格式和基础架构,将各种基准测试和数据集以统一的格式和简洁的代码库无缝集成到系统中。采用以下方法来收集任务和演示。
• 从其他模拟环境直接迁移。一些基准测试,将必要的组件集成到 ROBOVERSE 中。定义任务初始化和评估的环境配置,然后转换轨迹数据和资产格式以实现无缝兼容。值得注意的是,ROBOVERSE 通过首先在原始模拟器中对齐格式并自动确保所有模拟器的兼容性来简化此迁移过程。
• 运动规划和 RL 展开(Rollout)。当基准测试仅提供部分操作数据(例如关键点轨迹或抓取姿势)时,使用运动规划来生成完整的轨迹。如果没有明确的操作数据,但已经有预存在的策略或强化学习框架,会利用这些策略或训练新的策略以通过展开收集演示数据。为了确保数据的高质量和与系统标准的一致性,仔细调整成功检查器并严格过滤规划和收集的轨迹。
通过上述技术,将多个现有的操作数据集迁移到 ROBOVERSE。目前,支持 ManiSkill 84, 37, 112、RLBench 48、CALVIN 82、Meta-World 134、robosuite 145、MimicGen 79、GAPartNet 34、Open6DOR 24、ARNOLD 36、LIBERO 68、SIMPLER 66、GraspNet 27、GarmentLab 72 和 UniDoorManip 67。
还整合来自更广泛实例的数据集,包括灵巧手、四足机器人和人形机器人,涵盖灵巧操作、运动、导航和全身控制等任务。目前,已经迁移用于导航的 VLN-CE R2R 58 和 RxR 60,以及用于运动和全身控制的 HumanoidBench 106 和 Humanoid-X 80。
ROBOVERSE 简化并标准化迁移过程,今后将继续维护和扩展它。
任务、资产和轨迹收集:遥操作和生成
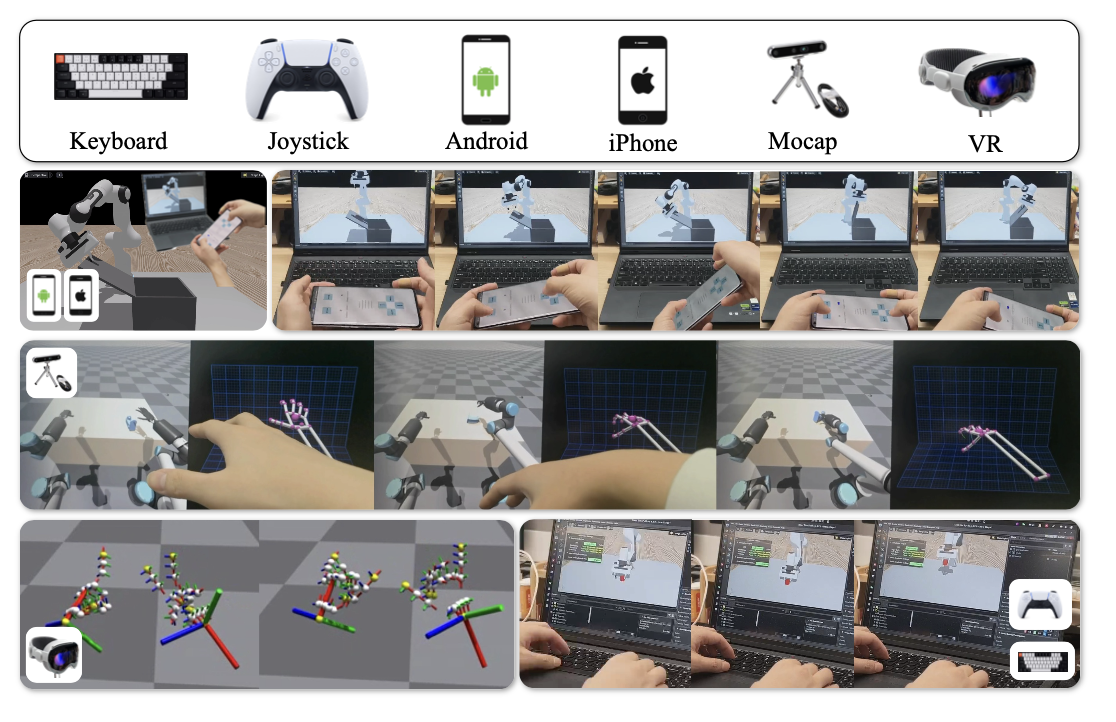
• 用于轨迹收集的遥操作系统。如图所示,ROBOVERSE 将遥操作系统集成到 METASIM 基础架构中,为高质量数据收集提供了灵活高效的解决方案。它支持各种机器人系统,包括手臂、灵巧手 91 和双手设置,从而实现跨不同模拟器的无缝遥操作。为了降低专业设备的高成本和复杂性,引入一种交互式运动控制系统,该系统利用键盘、操纵杆、移动设备应用程序(开发了一款适用于 Android 和 iOS 的新应用程序来控制机械臂)、动作捕捉 (Mocap) 117 和 VR 系统 12, 96 等可访问设备。这些设备的集成传感器可以捕获运动数据,从而实现自然的基于手势的控制以及实时高频通信,从而实现精确、低成本的遥操作。
• AI 辅助任务生成。利用大型生成模型的泛化能力,AI 辅助任务生成提供了一种机制,可以多样化任务种类和场景分布。通过从示例位置学习,它获得对空间和语义约束的感知 1(例如,通过演示特定的约束,它可以学习分散目标以避免潜在的重叠等)。它可以将来自不同基准的物体排列成基于 METASIM 的物理可信场景,如图所示。通过将机器人和目标选择的随机性52与初始姿态相结合,大型生成模型可以生成各种初始状态。该系统可以自动以统一的格式输出所有必需的配置文件,以实现即时可视化和用户友好的编辑体验。任务生成后,将进行两步过滤以避免错误和幻觉:(1)格式验证:不符合 ROBOVERSE 格式标准的任务将被丢弃。(2)可行性检查:由于轨迹数据是通过人工遥控收集的,因此遥控操作员认为不合理的任务将被删除。通过释放大型生成模型的外推和小样本学习能力,将资产自动集成到统一的模式下,从而驱动跨多个模拟器和基准的任务生成。
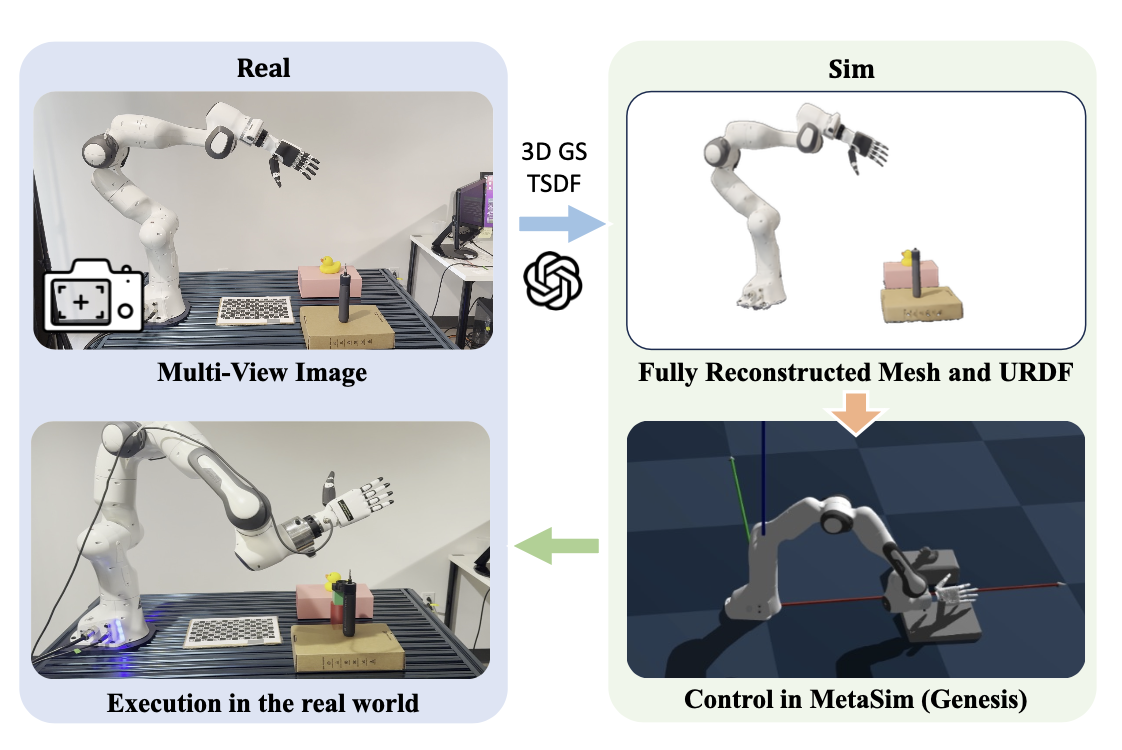
• Real-to-Sim 用于资产构建。事实证明,利用 Real-to-Sim 技术,基于视频的重建是数据和资产创建的宝贵来源。该方法集成了多个重建流程,从视频数据中提取高保真资产。首先,使用 COLMAP 103, 104 初始化结构,并采用Gaussian Splatting 53 进行高质量渲染。接下来,通过将语义图像和原始图像输入视觉语言模型 (VLM) 143 来推断物理属性。对于几何重建,从视频 132 中估计表面法线,应用面元铺展 45,并利用基于时间序列离散函数 (TSDF) 的动态滤波方法重建细节网格 131。通过利用语义掩码 99,选择性地从高斯表示和网格表示中提取分量。为了进一步增强真实感,直接从视频 69 中推断和学习物体运动学,确保运动表示的准确性。最后,通过细化坐标系、方向、轴对齐、比例、相对六自由度姿态和局部极化 (PD) 控制参数 71 等关键属性来构建 URDF 模型。该流程有效地弥合真实世界视频数据与可用于模拟的资源之间的差距,增强机器人学习和模拟保真度。如图所示一个Real-to-Sim 工具:
数据增强
-
轨迹增强:凭借统一的仿真接口和数据格式,ROBOVERSE 能够显著提高数据增强的效率,并支持先进的增强技术。除了 Benchmark Protocol 8 中详述的视觉随机化之外,还提供强大的轨迹空间增强功能。提供 API,可根据有限数量的源演示生成大规模机器人轨迹数据集。遵循 MimicGen 79 框架,对于大多数任务,可以将它们分解为一系列以目标为中心的子任务 (S_1 (o_S_1)、S_2 (o_S_2)、......、S_M (o_S_M)),其中每个子任务 S_i (o_S_i) 中的机器人轨迹相对于单个目标的坐标系(o_S_i ∈ O,O 是任务 M 中的目标集)。此外,假设每个任务中的子任务序列是预定义的。利用这种关于子任务顺序的极简人工注释,可以使用模拟器高效地将每个源演示划分为以目标为中心的连续操作片段 {τ_i}(每个片段对应一个子任务 S_i(o_i)),然后使用 MimicGen 79 为各种任务变体(在案例中:目标 (D) 和机器人 ® 的初始状态和目标状态分布的变化)生成广泛的轨迹数据集。这种方法已被证明在模仿学习中显著提高泛化能力 79, 50, 121, 31, 85,尤其是在源演示数量有限的场景中。
-
域随机化:在 METASIM 的 Isaac Sim 88 处理程序中实现域随机化。这涉及四种类型的随机化:
• 桌子、地面和墙壁。对于缺乏预定义场景的任务,可以添加墙壁(和天花板)。对于在桌面上执行的任务,还可以包含可自定义的表格。这些元素的视觉材质是从 ARNOLD 36 和 vMaterials 87 的精选子集中随机选择的。表格中有 ∼300 种材质选项,而墙壁和地面各有大约 ∼150 种材质选项。
• 光照条件。可以指定两种光照场景:远光和圆柱的光阵列。对于远光,光源的极角是随机的。对于圆柱光,在智体上方固定高度添加一个随机的 n × m 圆柱光矩阵,其大小是随机的。在这两种场景中,光源的强度和色温都在合理的范围内随机化。
• 相机姿态。精心挑选 59 个候选相机姿态,其中大多数姿态面向机器人正对方向,一小部分姿态面向机器人侧面。
• 反射属性。每个表面的粗糙度、镜面反射和金属属性都在合理的范围内随机化。
这些随机化选项可以自由组合。例如,一个场景可以包含一张定制的桌子、带天花板的墙壁和一组圆柱形灯,以模拟室内环境。
ROBOVERSE 数据集
- 数据集统计:
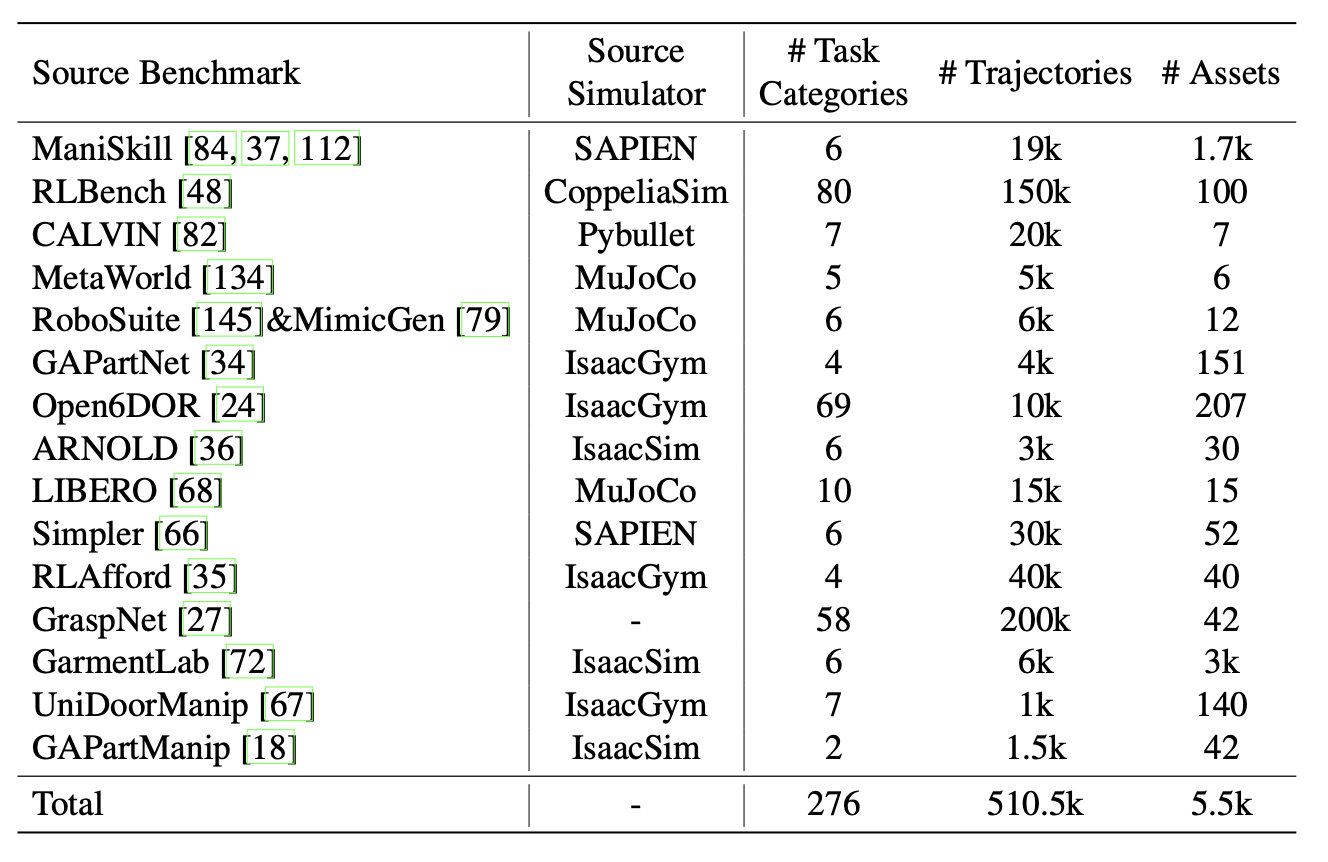
a) 操作数据集:将现有源基准 84, 37, 112, 48, 82, 134, 145, 79, 34, 24, 36, 68, 66, 35, 27, 72, 67, 18 中的各种操作数据集迁移到 ROBOVERSE。下表汇总了各源基准贡献的任务类别、轨迹和资产数量。本次迁移共计生成 276 个任务类别、510.5 万条轨迹和 5.5 万项资产。
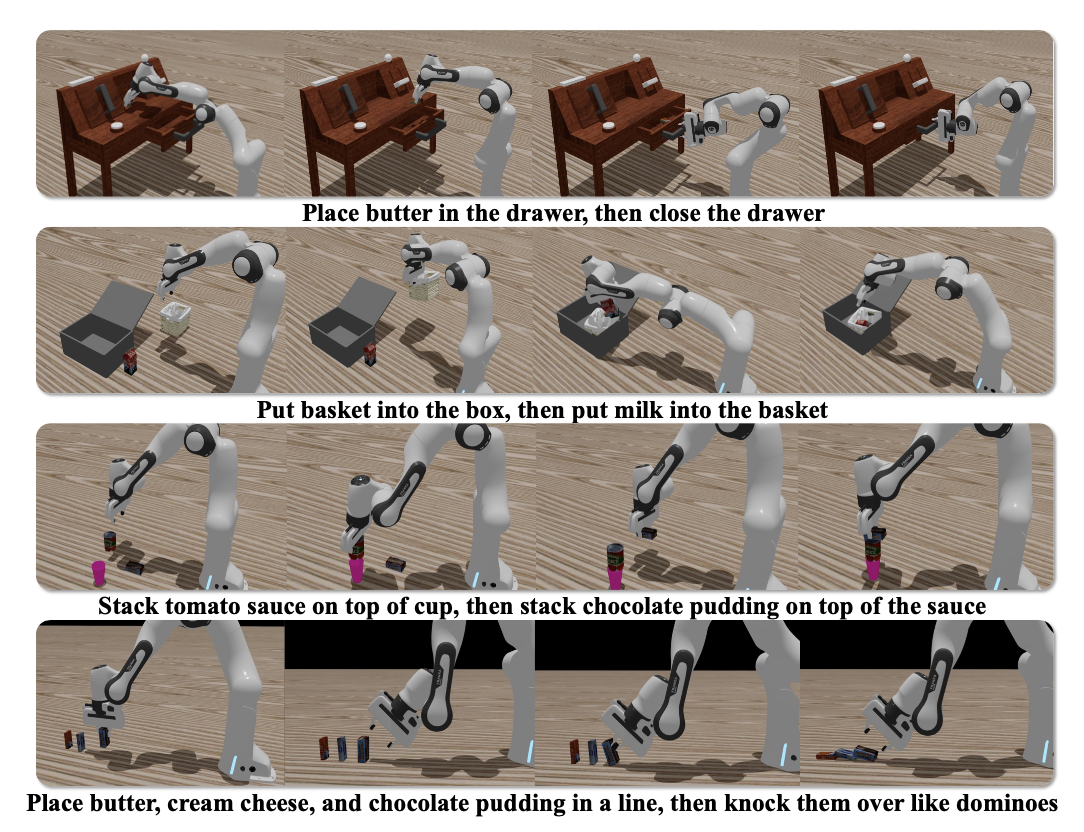
下图展示具有丰富域随机化的代表性任务。
b) 导航数据集:将视觉和语言导航 (VLN) 任务迁移到 ROBOVERSE。需要注意的是,存在各种具有不同设置的 VLN 任务;本文特别关注连续环境中的 VLN (VLN-CE) 58,因为它更接近真实场景 11, 139, 140。具体而言,基于 ROBOVERSE 构建数据集,集成了 MatterPort 3D 场景 9(90 个场景)以及 R2R 58(10k 个场景)和 RxR 60(20k 个场景)的现成指令。提供两种类型的移动实例,包括 Unitree Dog(腿式机器人)和 JetBot(轮式机器人),它们支持不同的控制策略。
c) 人形机器人数据集:将 HumanoidBench 106 任务迁移至强化学习基准,并集成了来自 Humanoid-X 80 和 SkillBlender 61 的任务、策略和数据样本。此外,在框架内重新实现 UH-1 推理流程。预训练策略成功地使人形机器人能够遵循演示姿势,同时在基于 ROBOVERSE 的多个模拟器上保持稳定的运动。
基准概述
通过收集任务、资产和轨迹,ROBOVERSE 为机器人学习(包括模仿学习和强化学习)建立了标准化基准。在 ROBOVERSE 平台内定义统一的训练和评估协议,并实施用于基准测试的标准化基线和学习框架。具体而言,对于模仿学习,引入不同级别的泛化基准来评估模型的泛化能力。
模仿学习基准
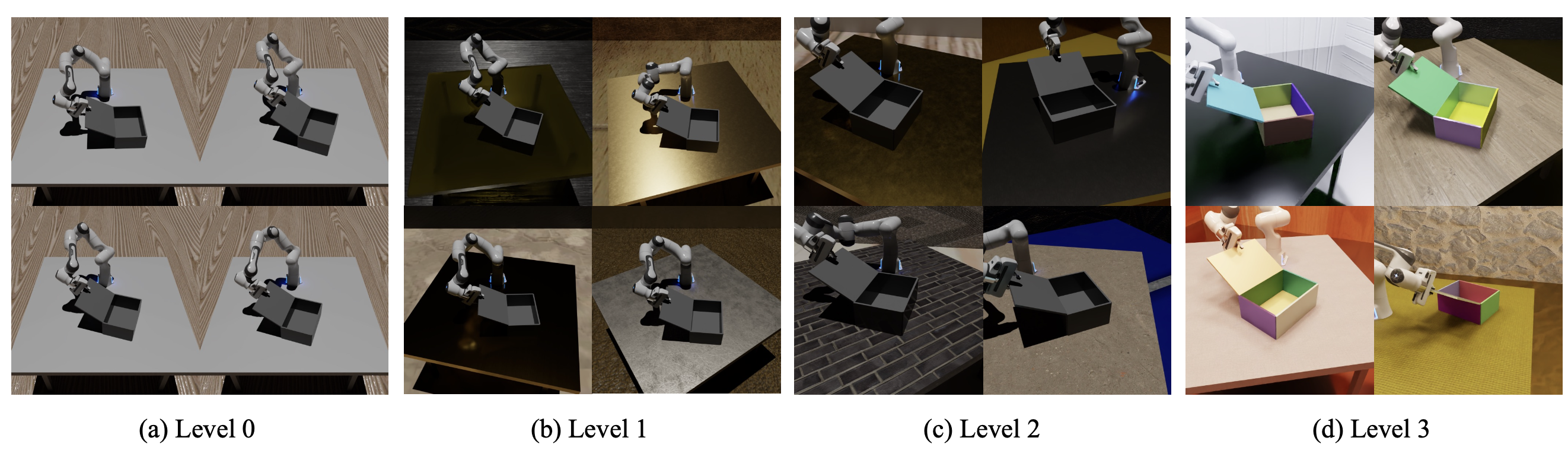
对于每个模仿学习基准,建立了一个标准化的评估框架,该框架包含一组固定的演示和受控的评估环境。策略必须专门基于提供的训练数据进行训练,并在此环境中进行评估,以确保公平比较。为了严格测试泛化能力,从特定领域收集训练数据,并在未见过的样本上评估策略,以测试其对新场景的适应性。系统地将视觉泛化因素分为多个级别,包括任务空间泛化、环境设置泛化、相机设置泛化以及光照和反射泛化。每个级别都引入受控的变量,以评估策略在日益多样化和具有挑战性的条件下的适应性和鲁棒性。
a) 级别 0:任务空间泛化:通过使用一致的相机、材质、光照和其他参数对环境进行标准化,建立受控评估。任务空间(包括目标初始化和指令)被分为 90% 的训练集和 10% 的验证集,以评估在固定设置下的泛化能力,如图 (a) 所示。
b) 级别 1:环境随机化:在标准化设置的基础上,在保持相机、材质和光照不变的情况下引入场景随机化 81。通过改变房屋、桌子和地面的配置,创建不同的视觉输入,以测试策略对环境变化的鲁棒性 51。一组固定的预定义随机场景可确保结构化评估,如图 (b) 所示。
c) 级别 2:相机随机化:为了评估跨相机变化的泛化能力,使用标注的真实相机姿态引入不同的观看高度和角度。按照 90/10 的训练/测试比例,确保评估的一致性和严格性,如图 © 所示。
d) 级别 3:光照和反射随机化:现实世界环境涉及各种材质和光照条件 116。为了模拟这些挑战,随机化光照和反射,并设计了逼真的物体材质和照明设置 19。这增强了在不同条件下的鲁棒性测试,如图 (d) 所示。
强化学习基准
除了模仿学习之外,ROBOVERSE 还提供了全面的强化学习 (RL) 基准,旨在适应各种任务、机器人实例和模拟后端。具体而言,将 Stable-Baselines3 98 和 rsl_rl 102 中的 PPO 105 算法集成到 METASIM 界面中,从而实现了简单的任务定义、无缝的环境切换和标准化的性能日志记录。
基于此基础架构,已成功将 Humanoid-Bench 106 基准测试中多个人形机器人控制任务移植到 ROBOVERSE。通过针对 rsl_rl 102 进行适配的接口,有效地扩展了框架兼容性,使其能够支持原始基准测试中的 TD-MPC2 41, 42 算法,同时保持了实现的保真度。