原创代码,包运行、不包讲解,请勿翻卖
文章目录
程序简介
完整的仿真系统,用于模拟多传感器阵列通过MUSIC算法估计目标方向,并通过多站交会定位技术确定目标空间位置。
关键技术特点
阵列信号处理:
-
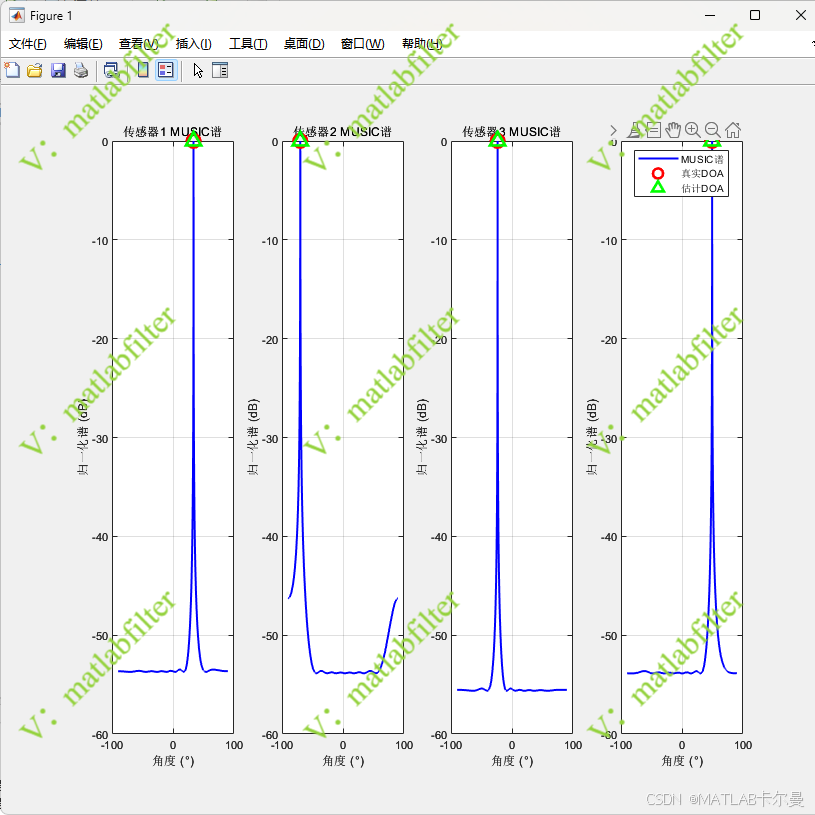
采用经典的MUSIC算法实现高分辨率DOA估计
-
处理低信噪比(-10dB)条件下的弱信号检测
-
支持任意传感器数量扩展
多传感器协同
-
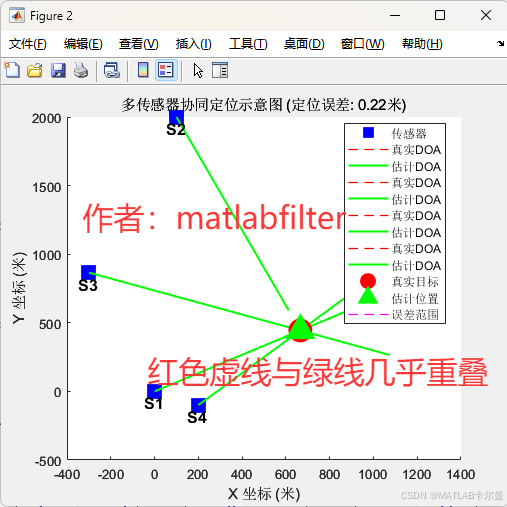
多站DOA测量数据融合,提高定位精度
-
鲁棒的最小二乘法定位算法,抵抗个别传感器误差
-
灵活的传感器布局配置
运行结果
MUSIC计算结果示意图:
多传感器定位结果示意图:
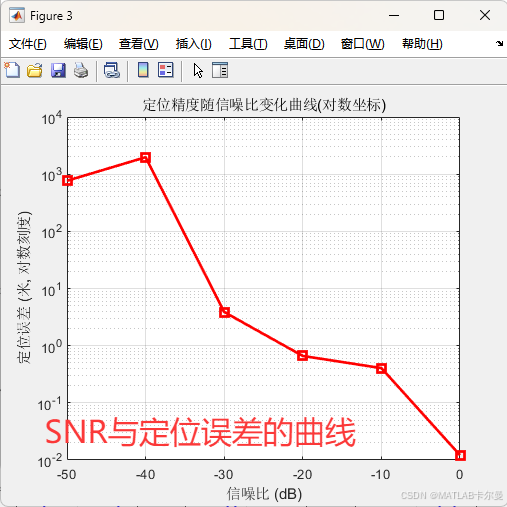
SNR(信噪比)与定位误差的曲线图:
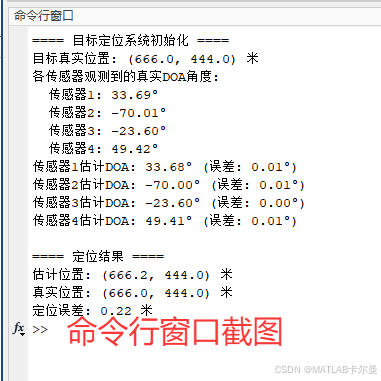
命令行截图:
MATLAB源代码
部分代码示例压缩包完整解压到文件夹中运行main函数即可如下:
matlab
%% 多传感器协同DOA技术下的目标定位研究
% 功能:使用MUSIC算法进行多传感器协同目标定位
% 作者:matlabfilter(V同号,可接代码定制、讲解与调试)
% 2026-01-12/Ver1
clear; close all; clc;
rng(0);
%% ==== 系统参数设置 ====
% 信号参数
fc = 1e9; % 载频,1GHz
c = 3e8; % 光速
lambda = c/fc; % 波长
fs = 5*fc; % 采样频率
T = 0.001; % 观测时间
t = 0:1/fs:T-1/fs; % 时间序列
N_snapshots = length(t); % 快拍数
% 阵列参数
N_elements = 8; % 阵元数
d = lambda/2; % 阵元间距(半波长)
array_pos = (0:N_elements-1)*d; % 阵列位置
% 传感器阵列位置(3个传感器站)
sensor_locations = [
0, 0; % 传感器1位置 (x,y) 单位:米
100, 2000; % 传感器2位置
-300, 866; % 传感器3位置(构成等边三角形)
200,-100
% 如需更多传感器,在下面补充
];
N_sensors = size(sensor_locations, 1);
% 目标参数
target_pos = [666, 444]; % 目标真实位置 (x,y)
N_targets = 1; % 目标数量
% 噪声参数
SNR_dB = -10; % 信噪比(dB)
%% ==== 计算真实DOA角度 ====
true_DOA = zeros(N_sensors, 1);
for s = 1:N_sensors
dx = target_pos(1) - sensor_locations(s,1);
dy = target_pos(2) - sensor_locations(s,2);
true_DOA(s) = atan2d(dy, dx); % 角度(度)
end
fprintf('==== 目标定位系统初始化 ====\n');
fprintf('目标真实位置: (%.1f, %.1f) 米\n', target_pos(1), target_pos(2));
fprintf('各传感器观测到的真实DOA角度:\n');
for s = 1:N_sensors
fprintf(' 传感器%d: %.2f°\n', s, true_DOA(s));
end
%% ==== 生成接收信号 ====完整代码,见:https://download.csdn.net/download/callmeup/92555587
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者