目录
1.课题概述
根据PID控制器的原理,设计FPGA的总体架构。通常包括误差计算模块、比例运算模块、积分运算模块、微分运算模块、加法器模块以及控制信号输出模块等。同时通过simulink对比PID控制仿真输出。
2.系统测试效果
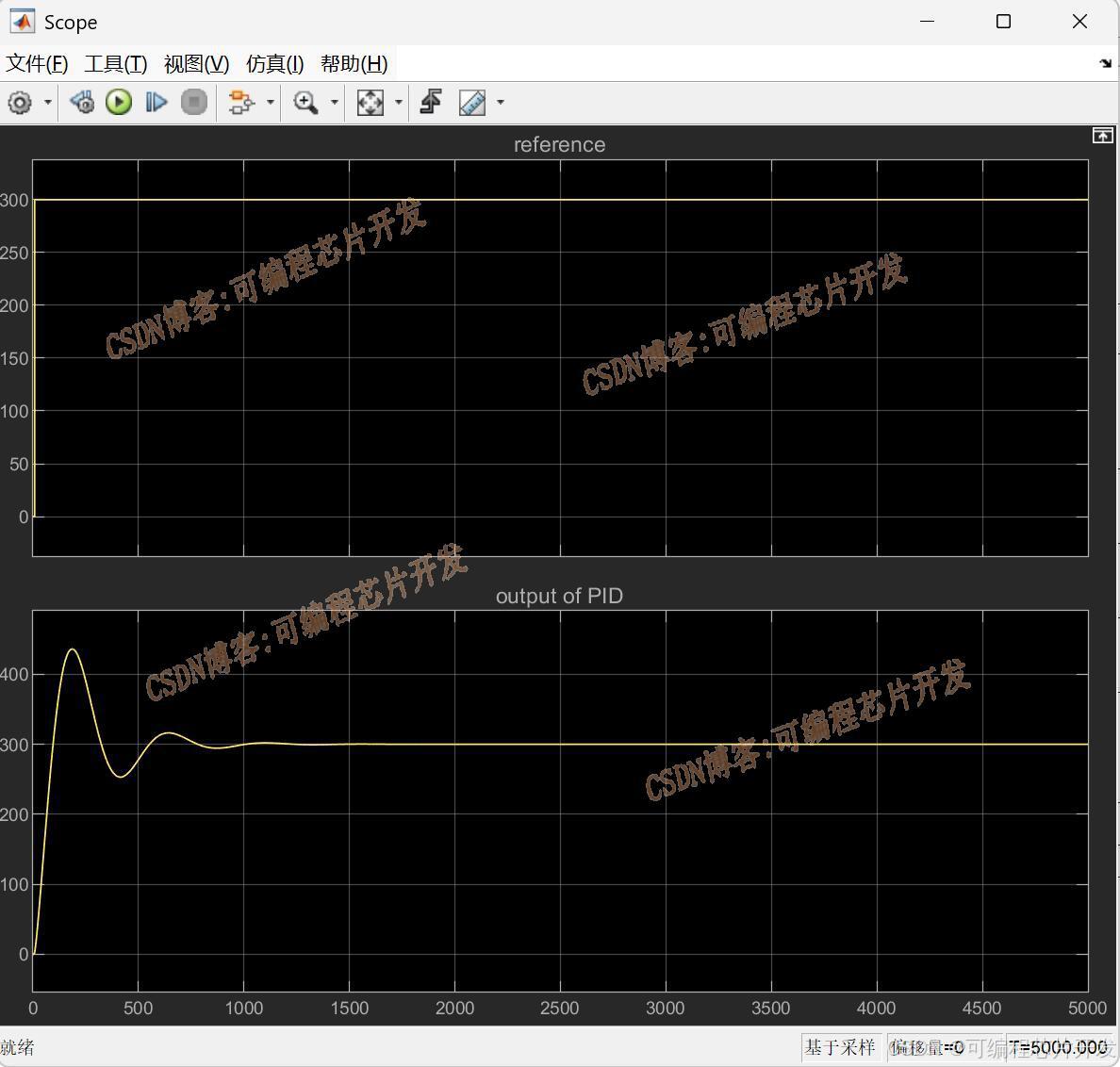
simulink仿真测试
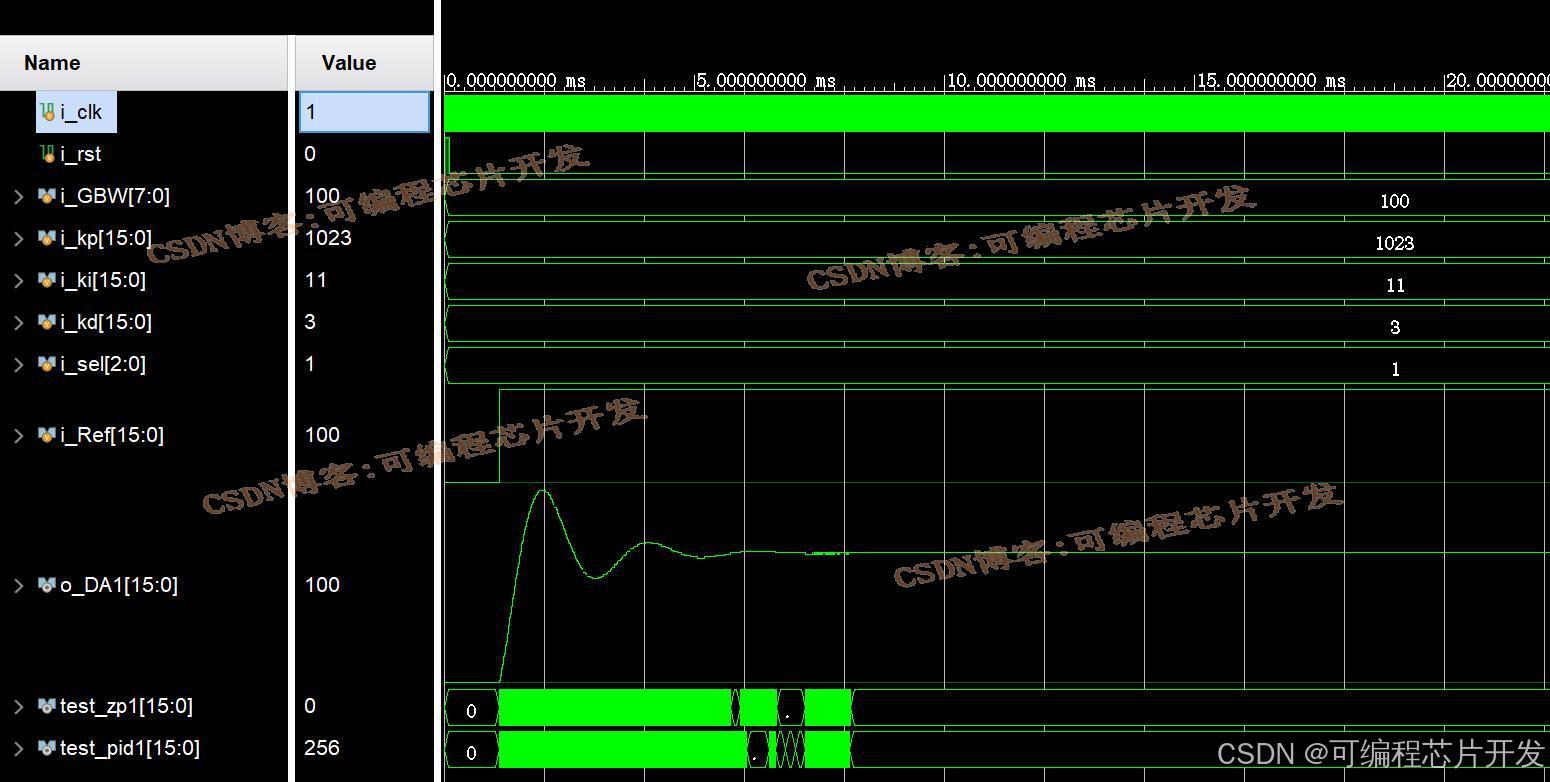
FPGA仿真测试
FPGA硬件测试

在实际测试过程中,如果你的开发板和我的不一样,可以参考本博客置顶文章进行硬件配置修改:
FPGA系统开发板调试过程不同芯片的移植步骤介绍_xilinx更换芯片怎么移植-CSDN博客
通过这个链接的步骤,可以实现不同开发板上的系统调试。
3.核心程序与模型
版本:vivado2022.2
`timescale 100ns / 100ps
module pid_zp_GBW(
i_clk,
i_rst,
i_GBW,
i_kp,
i_ki,
i_kd,
i_sel,
i_Ref,
o_DA1,
//test
test_zp1,
test_pid1
);
input i_clk;
input i_rst;
input [7:0]i_GBW;//1~200
input[15:0]i_kp;
input[15:0]i_ki;
input[15:0]i_kd;
input[2:0] i_sel;
input[15:0]i_Ref;
output signed[15:0]o_DA1;
//test
output signed[15:0]test_zp1;
output signed[15:0]test_pid1;
//STEP1
wire signed[15:0]err1;
//if hardware
//assign err1 = i_Ref-i_AD1;
//assign err2 = i_Ref-i_AD2;
//assign err3 = i_Ref-i_AD3;
//assign err4 = i_Ref-i_AD4;
//if simulation
assign err1 = i_Ref-o_DA1;
//zp
zp_filter zp_filter_u1(
.i_clk (i_clk),
.i_rst (i_rst),
.i_sel (i_sel),
.i_din (err1),
.o_dout (test_zp1)
);
//PID
//PID
PID_tops PID_tops_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_kp (i_kp),
.i_ki (i_ki),
.i_kd (i_kd),
.i_din (test_zp1),
.o_dout (test_pid1),
//test port
.o_doutp (),
.o_douti (),
.o_doutd ()
);
//GBW
GWB_tops GWB_tops_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_GBW (i_GBW),
.i_din1 (test_pid1),
.o_dout1 (o_DA1)
);
endmodule
00X6_003m4.系统原理简介
PID控制器由比例(Proportional)、积分(Integral)、微分(Derivative)三个环节组成,通过对误差信号进行比例、积分、微分运算,并将结果相加来控制被控对象,使其输出尽可能接近预期的目标值。
比例环节(P):比例环节的作用是根据当前误差的大小,成比例地输出控制量。其输出与误差信号成正比,比例系数Kp决定了控制作用的强度。比例环节能够快速响应误差的变化,使系统具有较快的调节速度。但单纯的比例控制会存在稳态误差,即系统最终稳定时,输出与目标值之间仍存在一定的偏差。
积分环节(I):积分环节用于消除系统的稳态误差。它对误差信号进行积分运算,随着时间的积累,积分项会逐渐增大,直到稳态误差为零。
微分环节(D):微分环节主要用于预测误差的变化趋势,提前给出控制作用,以减小系统的超调量和调节时间。它对误差信号的变化率进行运算,其输出与误差的变化速度成正比。
PID 控制器的总输出u(t) 是比例、积分、微分三个环节输出的叠加,即:

根据PID控制器的原理,设计FPGA内部的总体架构。通常包括误差计算模块、比例运算模块、积分运算模块、微分运算模块、加法器模块以及控制信号输出模块等。各个模块之间通过数据总线进行连接,实现数据的传输和处理。
5.完整工程文件
v
v