概述:
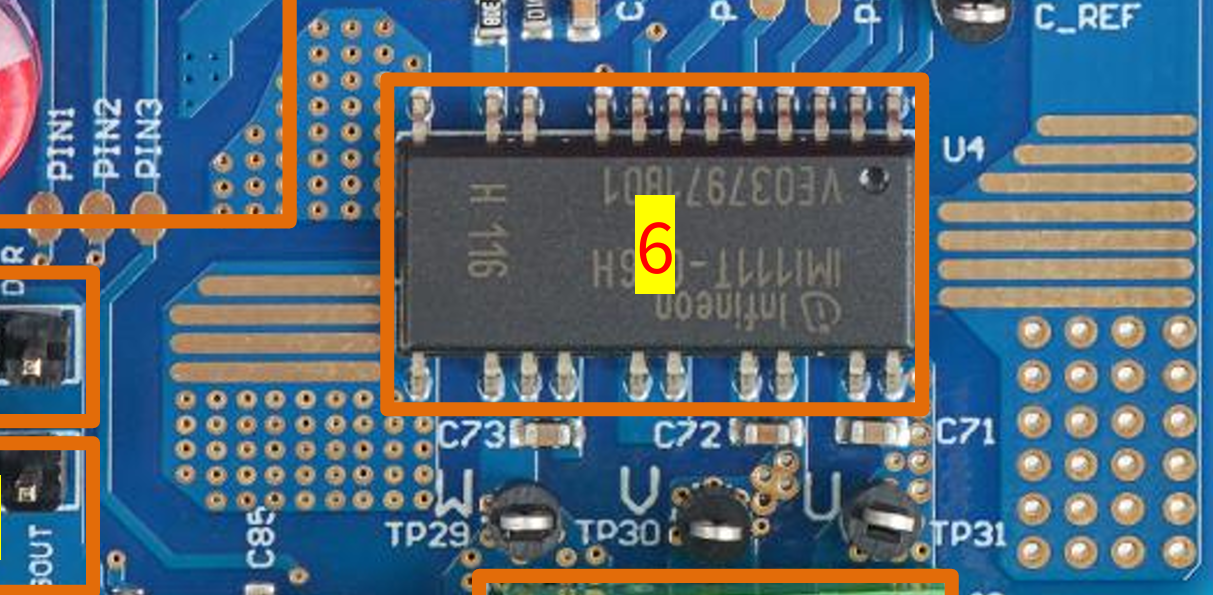
REF-MHA50WIMI111T 是一款专为风扇驱动设计的参考开发板,搭载了英飞凌的IMI111T-026H iMOTION™智能功率模块(IPM)。这个模块集成了运动控制引擎(MCE)、三相栅极驱动器和基于IGBT的功率级,全部封装在一个紧凑的DSO22封装中。REF-MHA50WIMI111T 开发板具备完整的三相逆变器功能,能够快速制作变频电机控制系统的原型,适用于风扇、压缩机等多种应用。
将电机控制器、三相栅极驱动器和600 V/2 A IGBT都集成在DSO-22封装中的iMOTION™ IPM
IMI111T-026H器件无需散热片,适用于额定输出功率为50 W、最高直流阻断电压达600 V的电机驱动器。
芯片IO定义:
| 引脚编号 | 名称 | 类型 | 描述 |
|---|---|---|---|
| 1 | TX0 | O | 串口发送输出 |
| 2 | RX0 | I | 串口接收输入 |
| 3 | VSP | AIN | 模拟速度参考输入(用于调速) |
| 4 | ISS | AIN | 单分流电阻电流检测输入(用于相电流采样) |
| 5 | VDC | AIN | 直流母线电压检测输入 |
| 6 | IREF | O | 过流参考DAC输出(设定过流保护阈值) |
| 7 | VDD | P | 数字控制器电源(如MCU供电) |
| 8 | VCC | P | 低侧IGBT栅极驱动电源 |
| 9 | VSS | P | 控制信号地(逻辑参考地) |
| 10 | GLV | NC | V相低侧IGBT栅极(PCB上无需连接) |
| 11 | VR | P | 三相低侧IGBT公共发射极回路(电流返回路径) |
| 12 | UN | P | U相低侧IGBT集电极(需在PCB上连接至UP) |
| 13 | VN | P | V相低侧IGBT集电极(需在PCB上连接至VP) |
| 14 | W/VSW | P | W相输出(自举电容负极连接点) |
| 15 | W/VSW | P | W相输出(自举电容负极连接点,冗余设计) |
| 16 | VBW | P | W相高侧悬浮电源(自举电容正极连接点) |
| 17 | V+ | P | 直流母线正极(高压电源输入) |
| 18 | V+ | P | 直流母线正极(冗余设计,增强电流承载能力) |
| 19 | VBV | P | V相高侧悬浮电源(自举电容正极连接点) |
| 20 | VP | P | V相高侧IGBT发射极(需在PCB上连接至VN) |
| 21 | VBU | P | U相高侧悬浮电源(自举电容正极连接点) |
| 22 | UP | P | U相高侧IGBT发射极(需在PCB上连接至UN) |
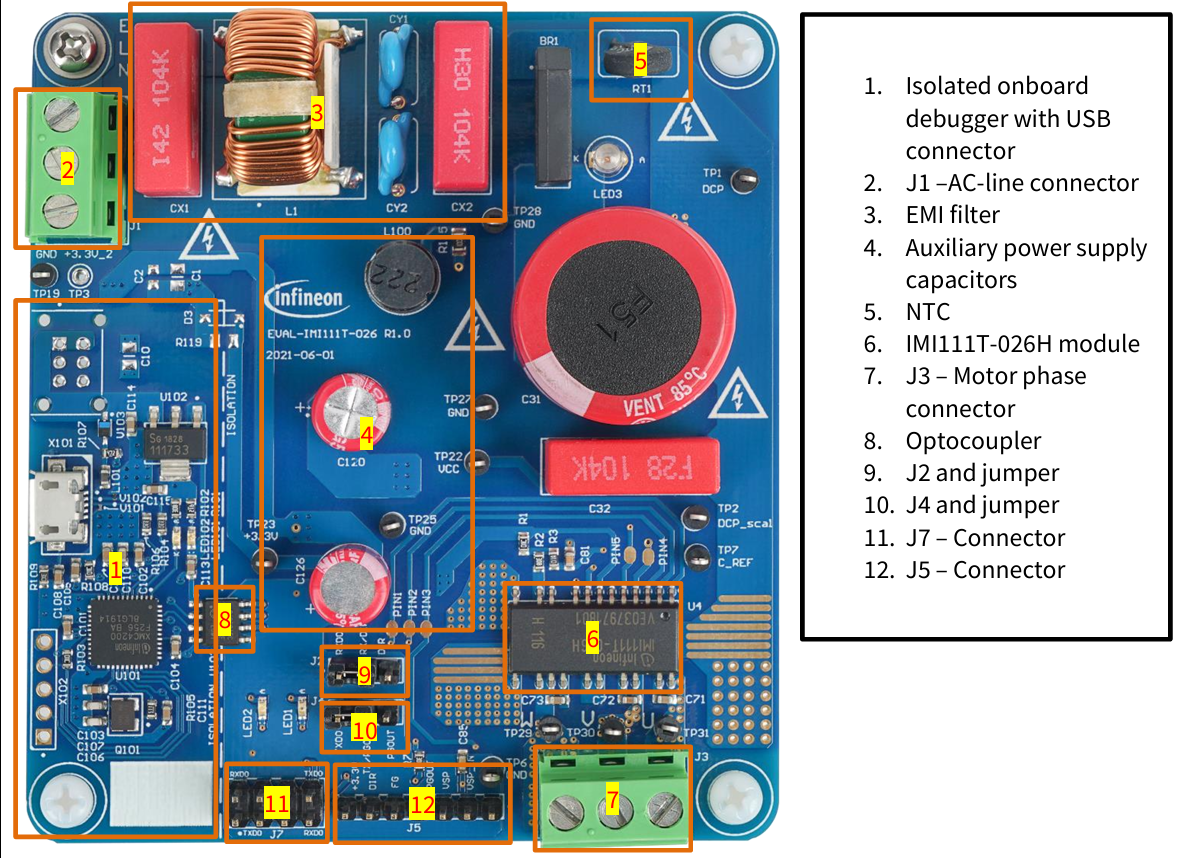
整机实物图:
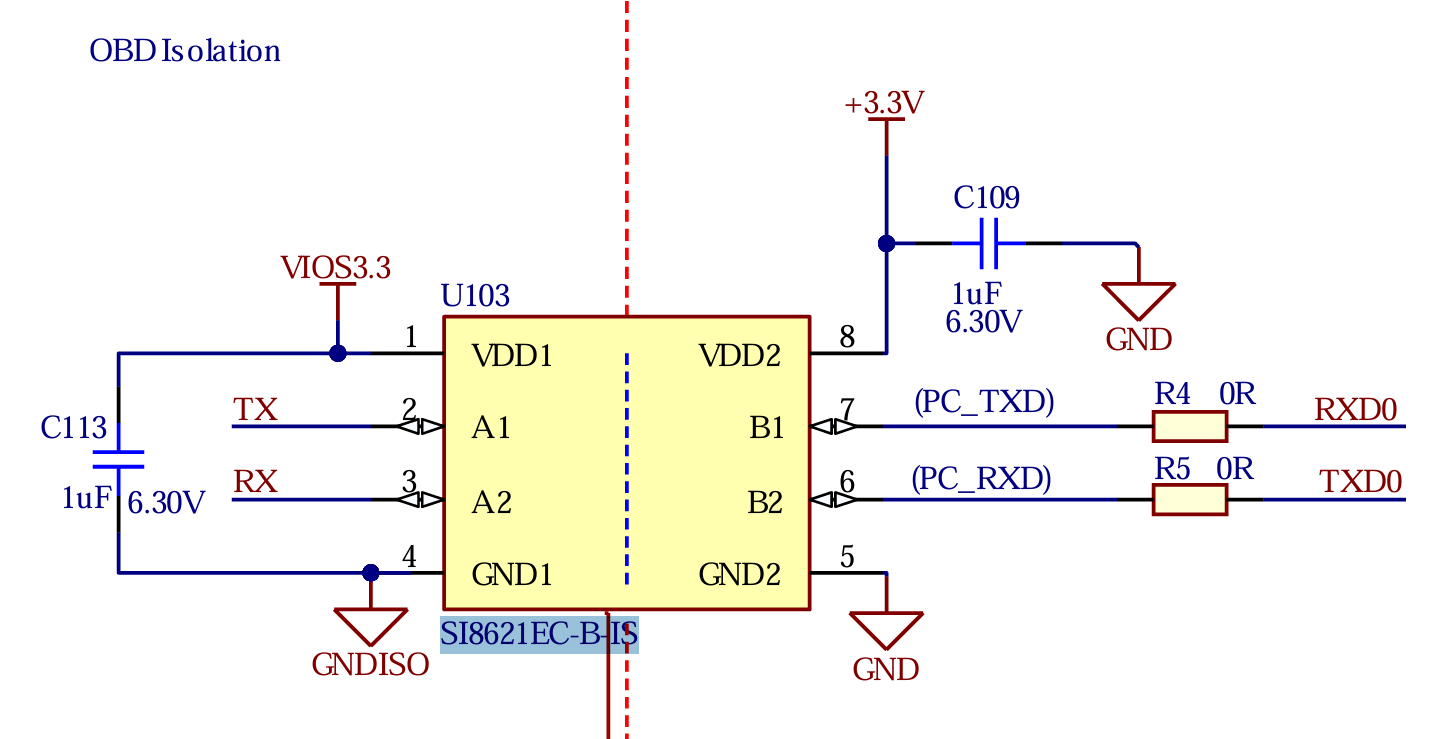
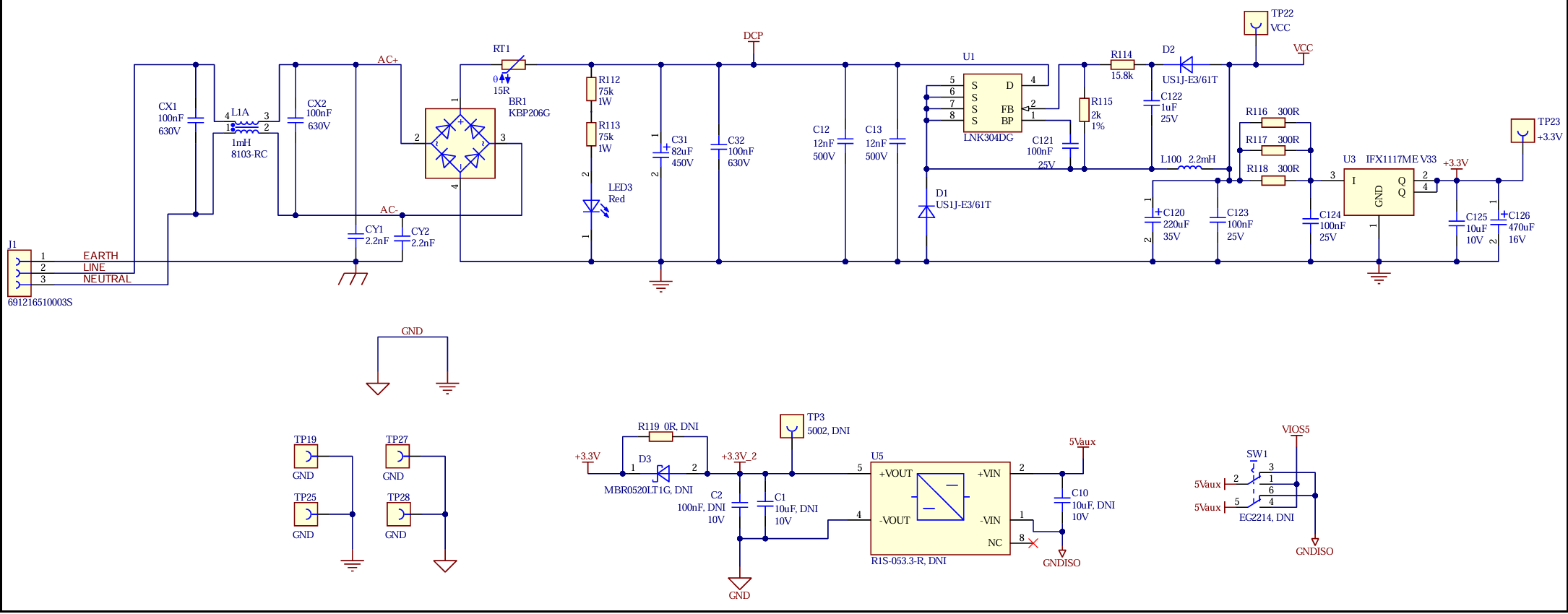
原理图:
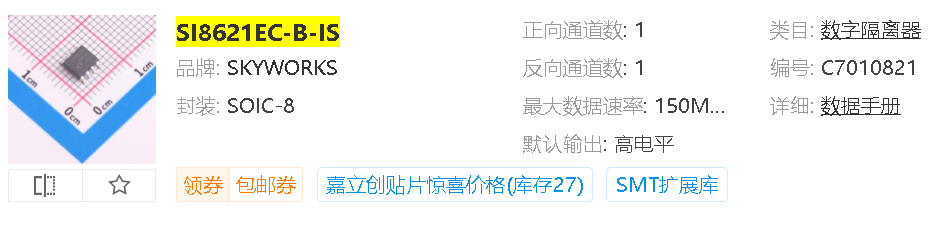
数字隔离器:
|------|-----------------|
| 隔离电压 | 2.5 kVrms(60 秒) |
|------|--------------------------|
| 工作电压 | VDD1 和 VDD2:2.5V ~ 5.5V |
|------|-------------|
| 数据速率 | 最大 150 Mbps |
|-------------------------|-------------|
| 传播延迟(Propagation Delay) | 2.5 ns(典型值) |
|---------------|-------------------------|
| 信号边沿延迟差(Skew) | 通道间:< 1 ns;器件间:< 3 ns |
|---------------|--------------|
| 共模瞬变抗扰度(CMTI) | > 100 kV/μs |
开关电源:
LNK304DG(工作模式):
Buck(降压):适用于输出电压低于输入电压的情况。
Buck-Boost(升降压):适用于输入电压可能高于或低于输出电压的情况。
集成 MOSFET :内置 700V 功率 MOSFET,减少外部元件需求。
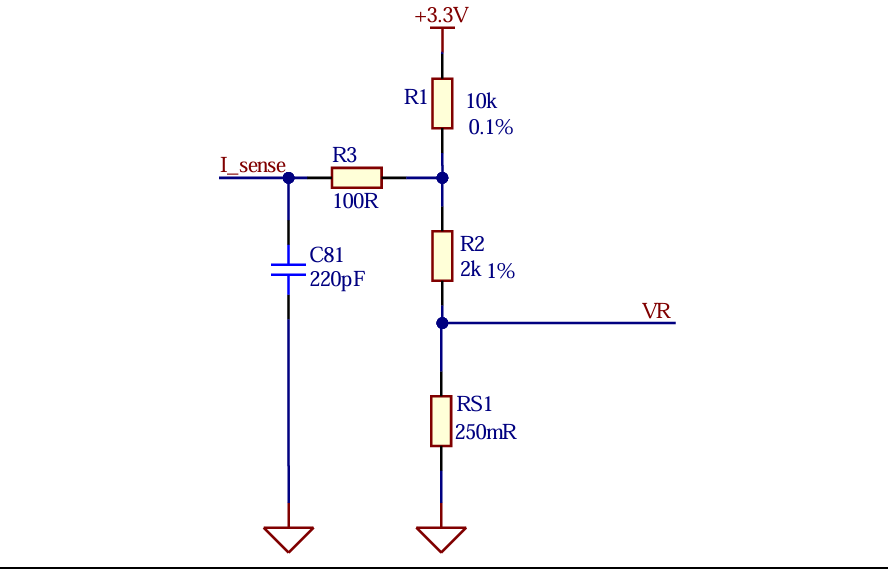
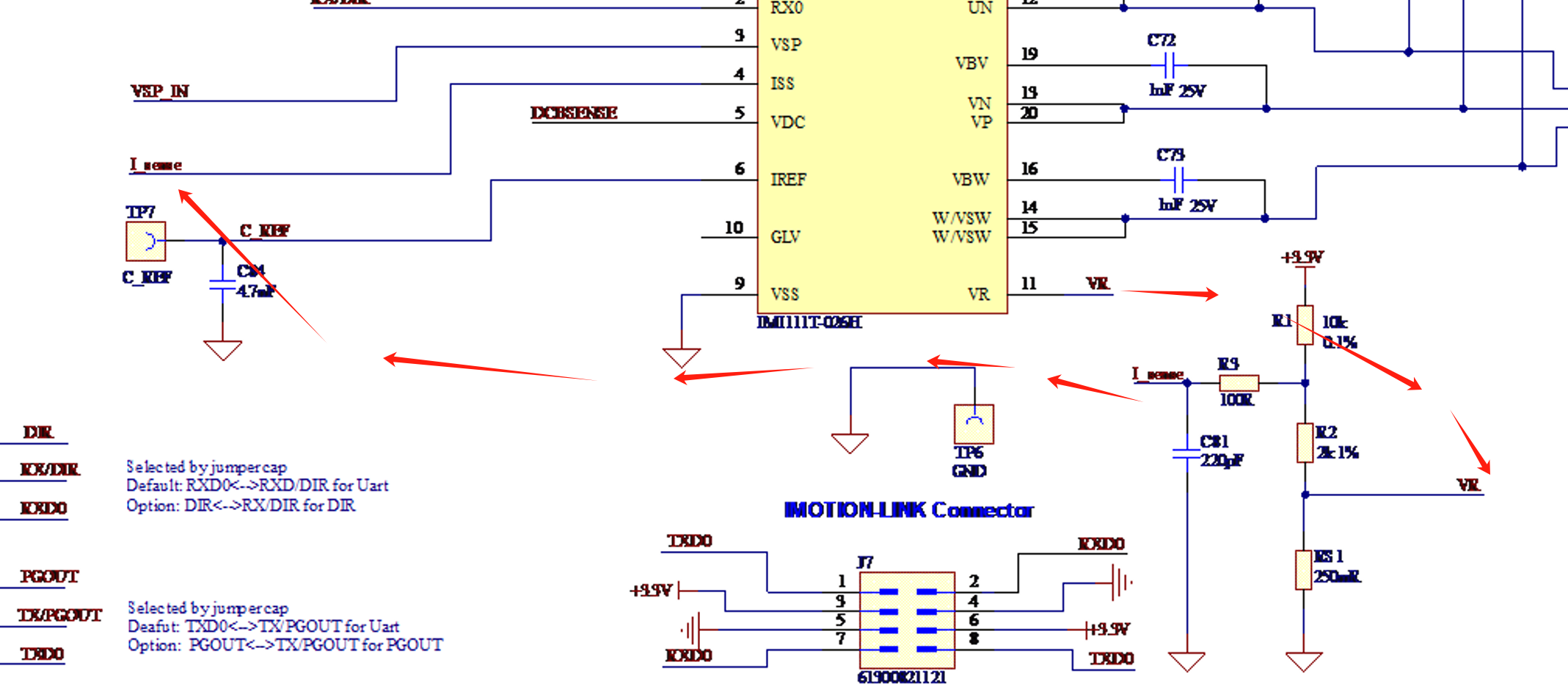
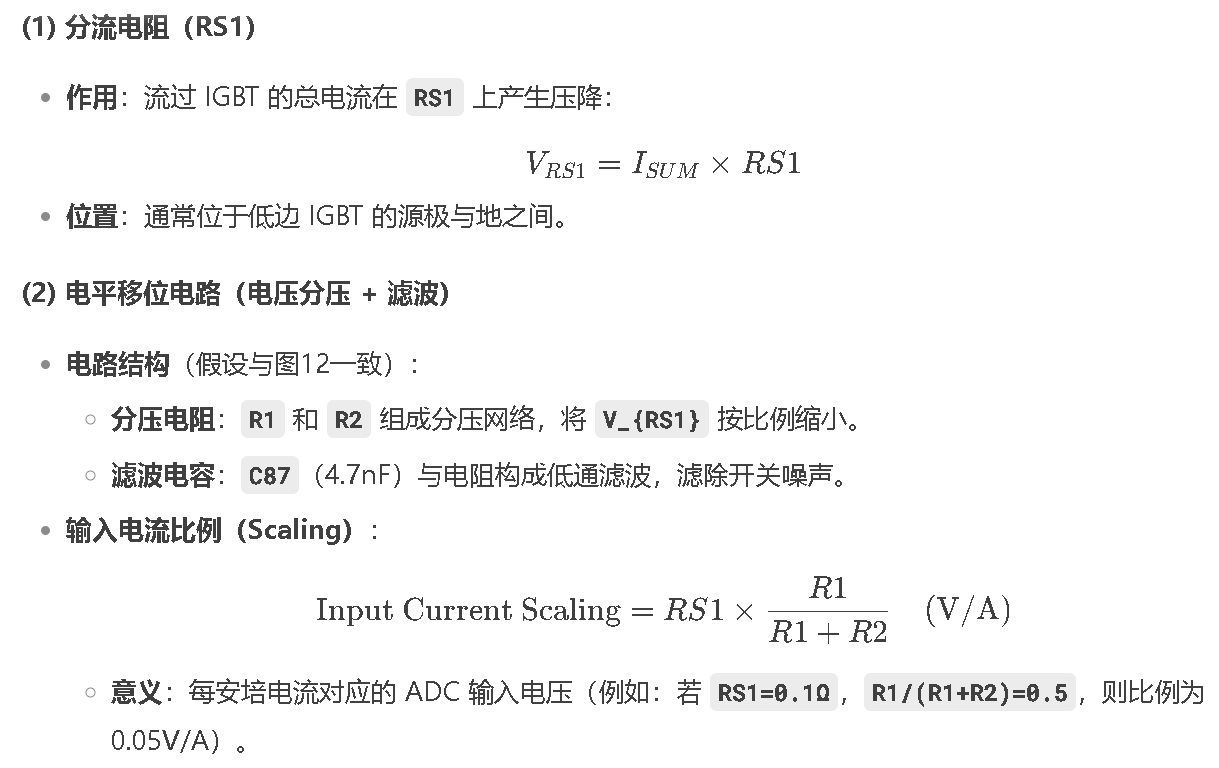
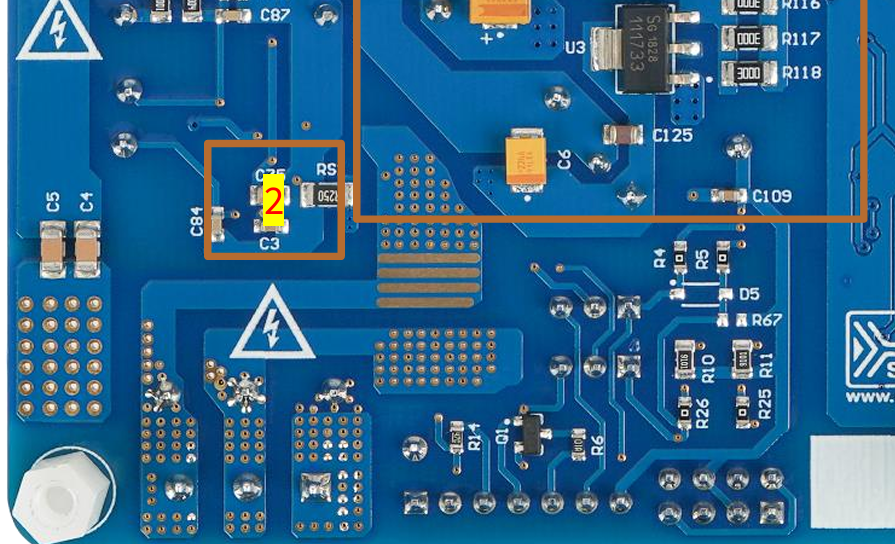
IPM电路:
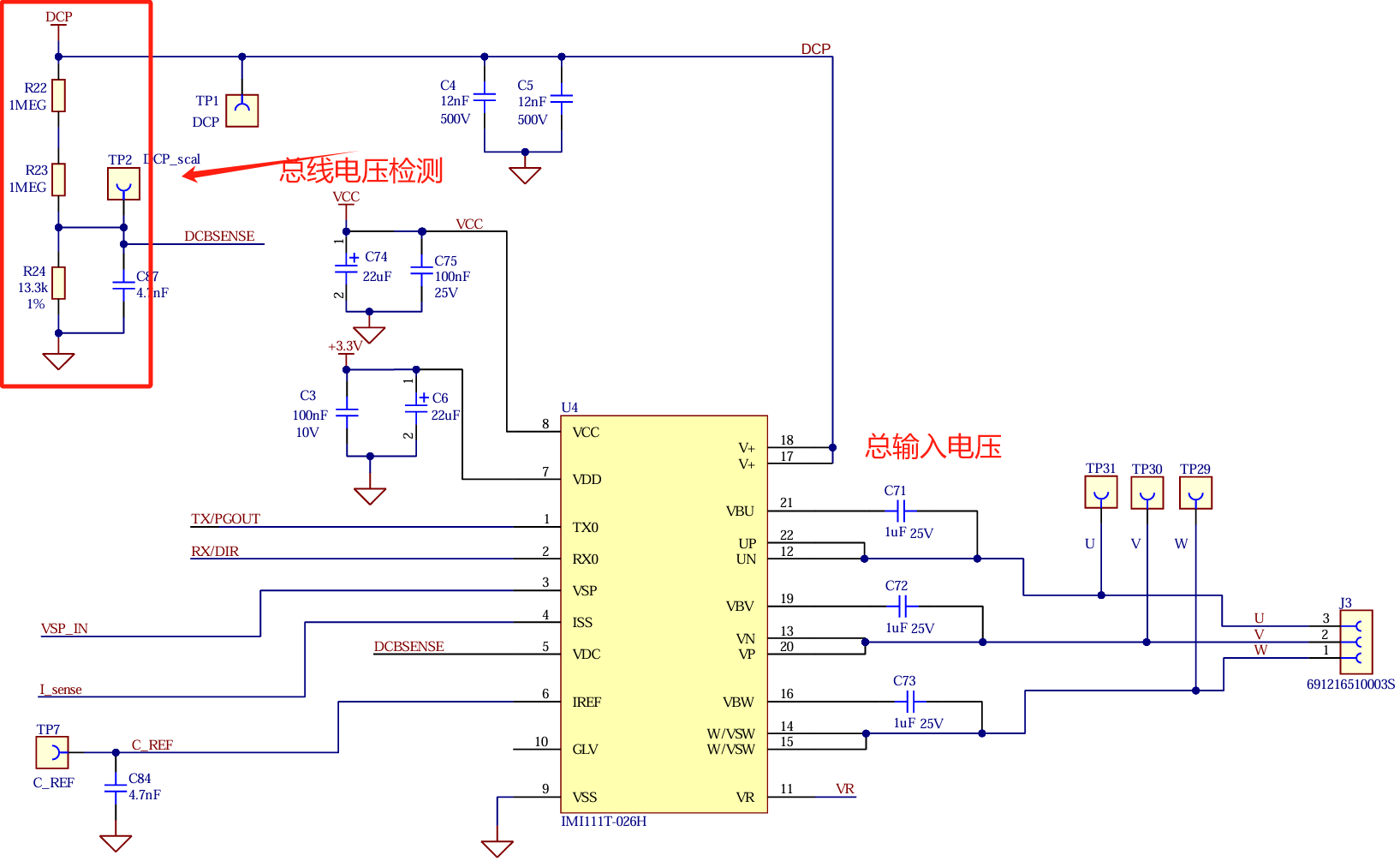
通过单个分流电阻(RS1)检测多路 IGBT 的低边总电流,转换为电压信号后,经电平移位和滤波,送入 MCU 的 ADC 或比较器进行电流监控和过流保护。
-
分流电阻(RS1):电流→电压转换。
-
电平移位电路(Shift Stage):调整电压范围以适应 ADC 输入