目录
- 引言
- 前期准备
-
- [Step1 创建工程](#Step1 创建工程)
- [Step2 创建接口](#Step2 创建接口)
- [Step3 创建基类](#Step3 创建基类)
- [Step4 添加海康SDK](#Step4 添加海康SDK)
- [Step5 实现海康SDK的操作相机实例和设置相机参数接口方法](#Step5 实现海康SDK的操作相机实例和设置相机参数接口方法)
-
- [5.1 获取相机SN枚举(枚举相机)](#5.1 获取相机SN枚举(枚举相机))
- 5.2初始化相机(创建相机实例打开相机)
- [5.3 回调函数(图像采集Event)](#5.3 回调函数(图像采集Event))
- [Step6 调用封装的DLL实现取图](#Step6 调用封装的DLL实现取图)
引言
机器视觉实际应用场景广泛,连接的相机品牌多样化,本教程旨在演示如何利用C#语言中类的继承与多态的特性实现多种工业相机的SDK调用快速封装,可适用于海康威视/Basler/Cognex/华睿科技/迈德威视等各种品牌。
本教程先演示如何封装海康工业相机。
前期准备
下载并安装海康工业相机客户端MVS
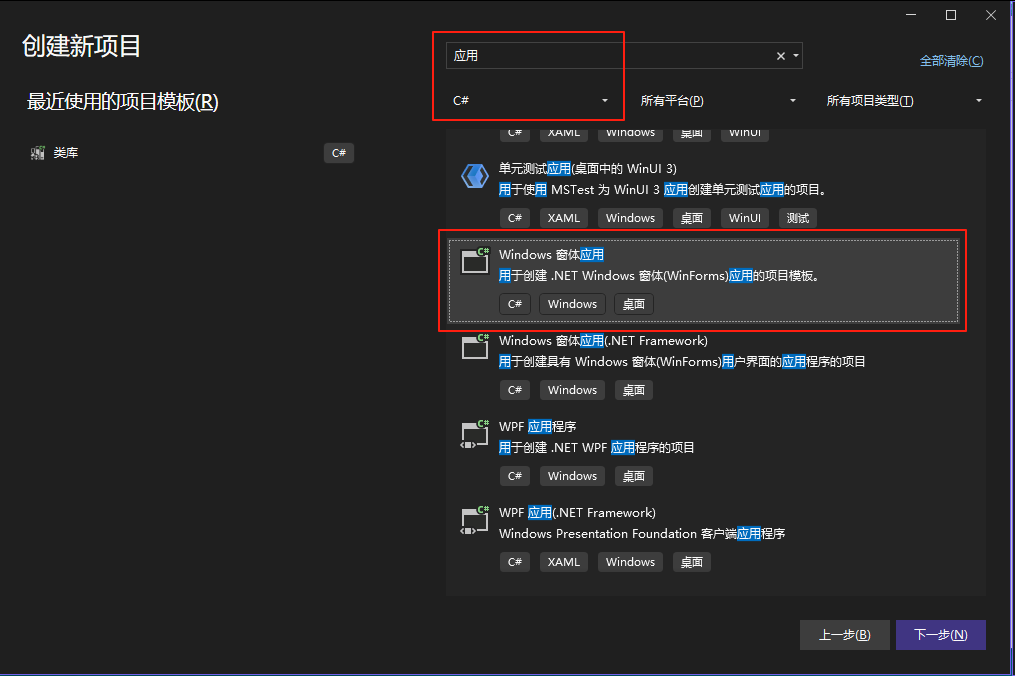
Step1 创建工程
利用Visual Studio创建.NET6.0工程
根据实际情况选择.NET/.NET Framework/WPF
Step2 创建接口
创建相机接口ICamera
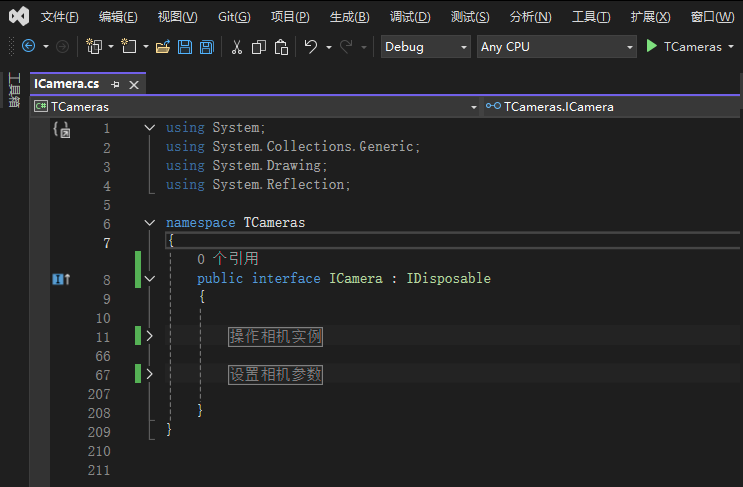
2.1定义操作相机实例接口方法
| 接口 | 传参 | 说明 |
|---|---|---|
| List< string > GetListEnum() | / | 获取相机SN枚举 |
| bool InitDevice(string SN, object Handle = null) | 相机SN && 窗口句柄 | 初始化相机 |
| bool CloseDevice() | / | 关闭相机 |
| bool StartBySoftTriggerModel() | / | 相机开始采集并设置为软触发模式 |
| bool StartByHardTriggerModel(TriggerSource triggerSource = TriggerSource.Line0) | 触发源 | 相机开始采集并设置为硬触发模式 |
| bool SoftTrigger() | / | 软触发一次 |
2.2定义设置相机参数接口方法(部分)
| 接口 | 传参 | 说明 |
|---|---|---|
| bool SetTriggerMode(TriggerMode mode, TriggerSource source = TriggerSource.Line0) | 触发模式&&触发源 | 设置触发模式及触发源 |
| bool SetExpouseTime(double value) | 曝光时长 | 设置曝光时长 |
Step3 创建基类
这里涉及到类的继承与多态,读者不了解可自行扩展学习 之所以定义相机基类是为了规范该接口适用于其他品牌相机的SDK例如巴斯勒/康耐视/华睿/迈德威视等
3.1定义操作相机实例&&设置相机参数的抽象层
| 接口 | 传参 | 说明 |
|---|---|---|
| public abstract List< string > GetListEnum() | / | 获取相机SN枚举 |
| public abstract bool InitDevice(string SN, object Handle = null) | 相机SN && 窗口句柄 | 初始化相机 |
| public abstract bool CloseDevice() | / | 关闭相机 |
| public abstract bool StartBySoftTriggerModel() | / | 相机开始采集并设置为软触发模式 |
| public abstract bool StartByHardTriggerModel(TriggerSource triggerSource = TriggerSource.Line0) | 触发源 | 相机开始采集并设置为硬触发模式 |
| public abstract bool SoftTrigger() | / | 软触发一次 |
| public abstract bool SetTriggerMode(TriggerMode mode, TriggerSource source = TriggerSource.Line0) | 触发模式&&触发源 | 设置触发模式及触发源 |
| public abstract bool SetExpouseTime(double value) | 曝光时长 | 设置曝光时长 |
3.2定义操作相机实例&&设置相机参数的公用方法
1.获取当前帧图片
所有的相机取图都通过回调的方式获取
通过获取相机回调的CallBackImg来实现
该方法不能用于实时取图存在多线程问题
csharp
/// <summary>
/// 获取当前帧图像
/// </summary>
/// <param name="bitmap"></param>
/// <param name="outtime"></param>
/// <returns></returns>
public bool GetImage(out Bitmap bitmap, int outtime = 50)
{
bitmap = null;
if (CallBackImg == null)
return false;
lock (CallBackImg)
{
//bitmap = this.CallBackImg.Clone() as Bitmap;
bitmap = CallBackImg;
Bitmap = bitmap;
//必须清空CallBackImg
CallBackImg = null;
return true;
}
}在相机的图像回调函数中需要将当前帧取图的结果暂存在CallBackImg变量中,具体解释可见Step5-5.3 回调函数
2.软触发获取图像
软触发取图前将暂存原触发方式在本地便于硬触发工况下取图测试
实际操作为发送一次软触发指令通过获取回调返回的单帧图像
csharp
/// <summary>
/// 软触发获取图像
/// </summary>
/// <param name="bitmap"></param>
/// <param name="outtime"></param>
/// <returns></returns>
public bool GetImageWithSoftTrigger(out Bitmap bitmap, int outtime = 3000)
{
if (!isGrabbing)
StartGrabbing();
// 开始时间
DateTime startTime = DateTime.Now; // 当前时间
// 设置超时时间
DateTime lastTime = startTime.AddMilliseconds(outtime);
// 判断是否超时
while (lastTime > DateTime.Now)// 设置超时时间为 3 秒
{
if (isGrabbing)
break;
}
GetTriggerMode(out TriggerMode triggerMode, out TriggerSource triggerSource);
SetTriggerMode(TriggerMode.On, TriggerSource.Software);
bitmap = null;
// 开始时间
startTime = DateTime.Now; // 当前时间
// 设置超时时间
lastTime = startTime.AddMilliseconds(outtime);
if (!SoftTrigger()) return false;
// 判断是否超时
while (lastTime > DateTime.Now)// 设置超时时间为 3 秒
{
GetImage(out bitmap, outtime);
if (bitmap != null)
break;
}
if (triggerMode == TriggerMode.On)
SetTriggerMode(triggerMode, triggerSource);
return (bitmap != null);
}3.获取和设置相机参数
csharp
public void SetCamConfig(CameraConfig config)
{
SetTriggerMode(config.TriggerMode, config.TriggerSource);
SetTriggerPolarity(config.TriggerPolarity);
SetTriggerDelay(config.TriggerDelay);
SetTriggerFliter(config.TriggerFilter);
SetExpouseTime(config.ExpouseTime);
SetGain(config.Gain);
}
public void GetCamConfig(out CameraConfig config)
{
string SN = this.SN;
CameraBrand Brand = this.Brand;
GetTriggerMode(out TriggerMode triggerMode, out TriggerSource triggerSource);
GetTriggerPolarity(out TriggerPolarity triggerPolarity);
GetTriggerFliter(out double triggerfilter);
GetTriggerDelay(out double triggerdelay);
GetExpouseTime(out double expouseTime);
GetGain(out double gain);
config = new CameraConfig()
{
CameraSN = SN,
Brand = Brand,
TriggerMode = triggerMode,
TriggerSource = triggerSource,
TriggerPolarity = triggerPolarity,
TriggerFilter = triggerfilter,
TriggerDelay = triggerdelay,
ExpouseTime = expouseTime,
Gain = gain
};
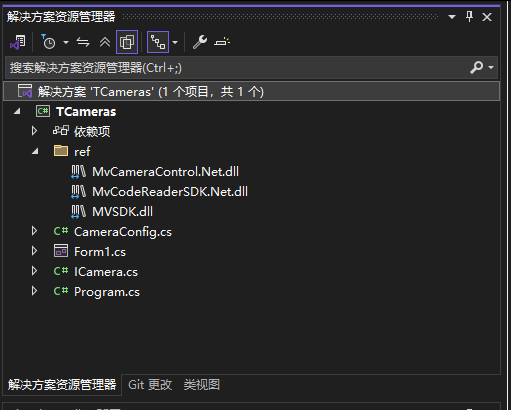
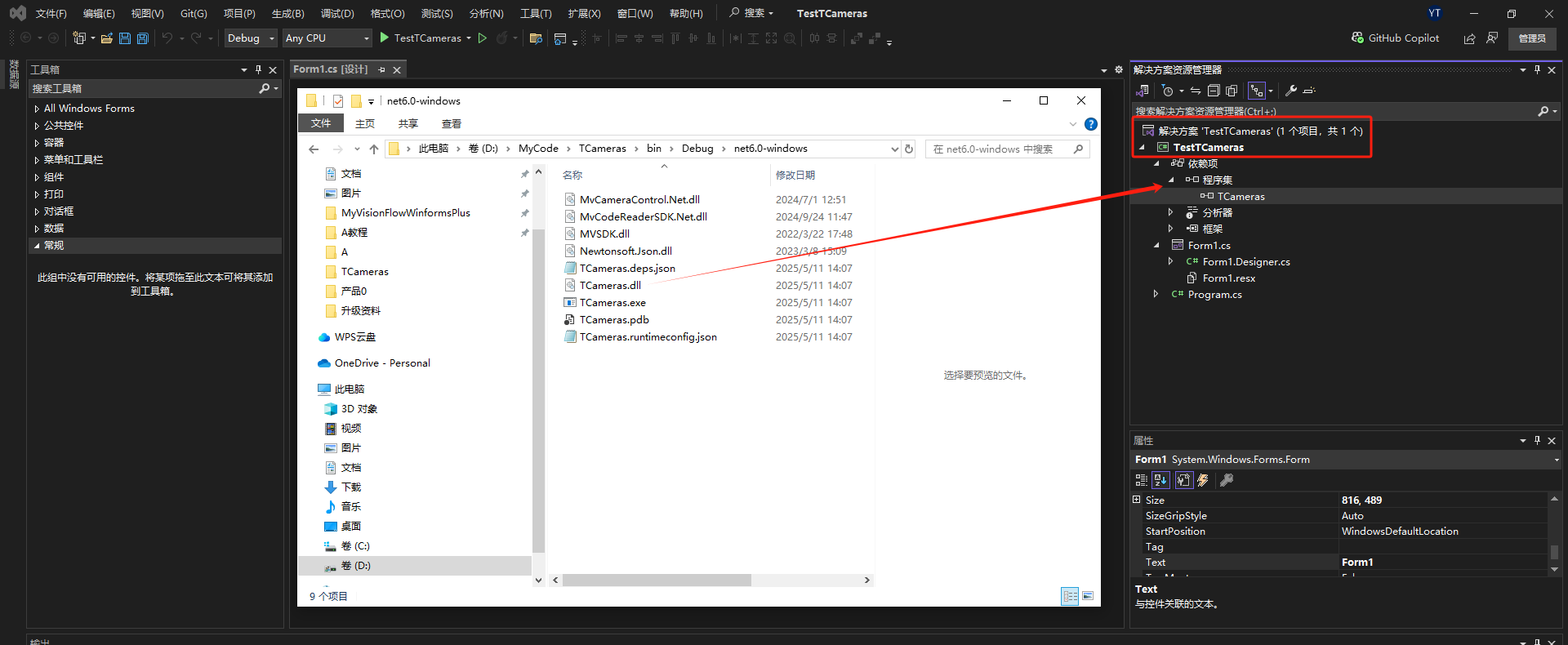
}Step4 添加海康SDK
4.1在工程文件中创建ref文件夹
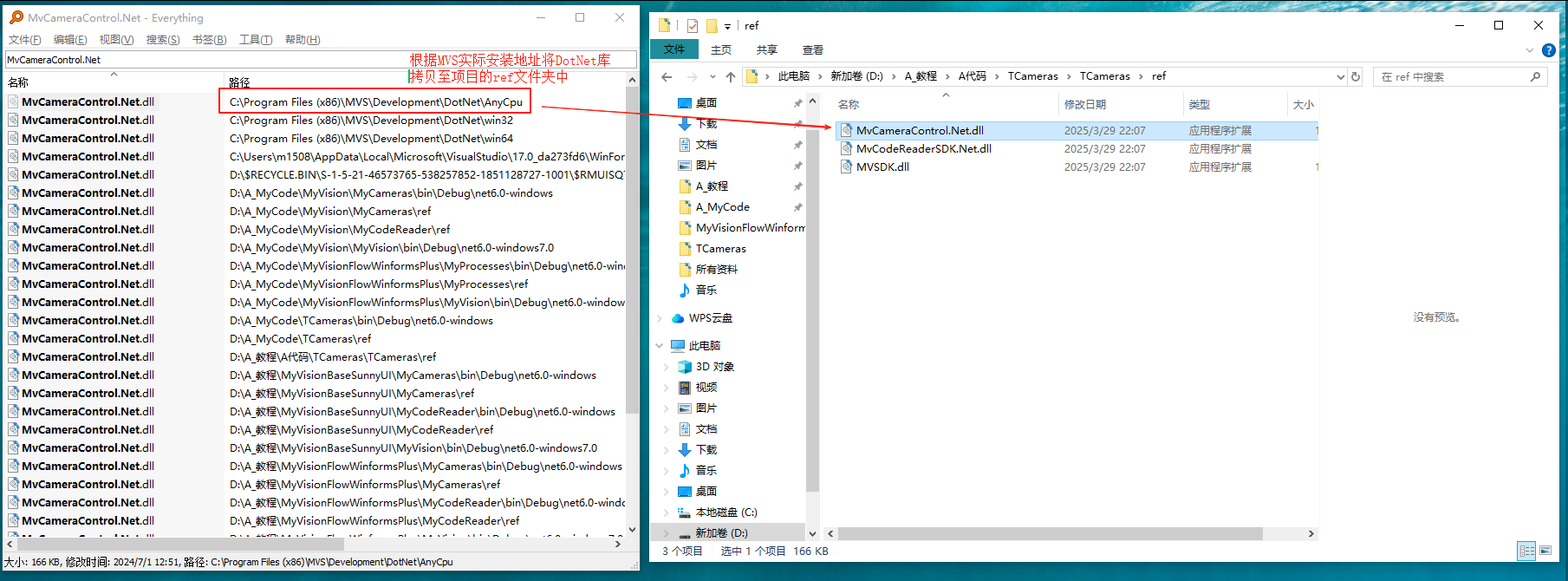
拷贝成功后在解决方案资源管理器中ref下会有对于的dll(没有则手动添加)
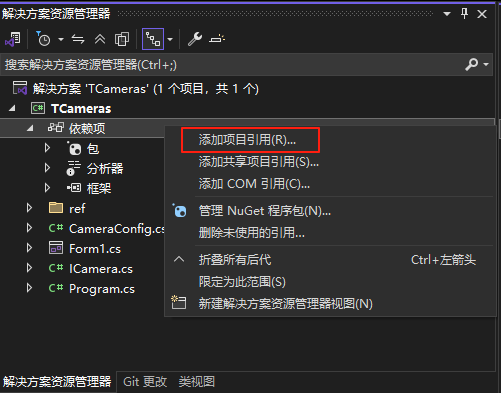
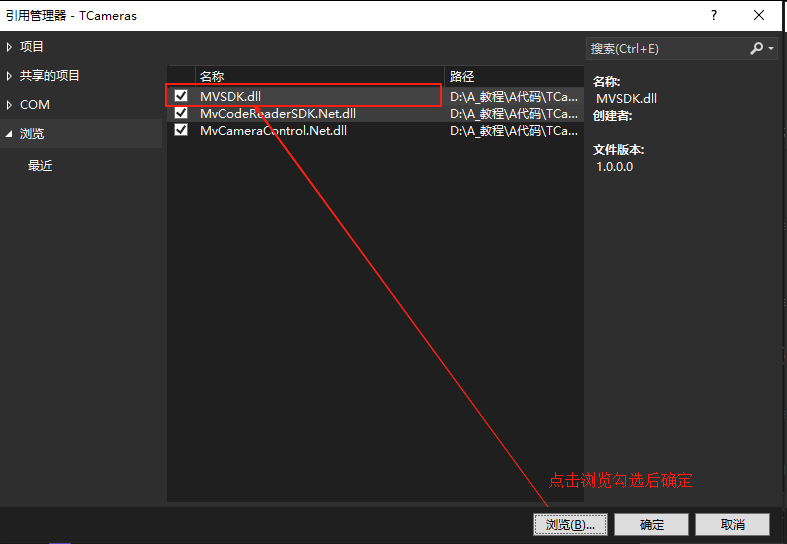
4.2解决方案添加引用
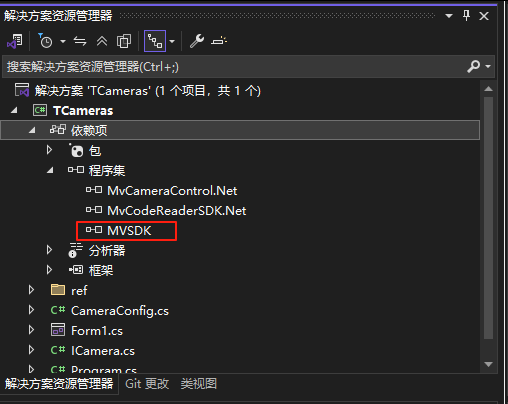
程序集下有MVSDK即代表添加DLL完成
Step5 实现海康SDK的操作相机实例和设置相机参数接口方法
所有相机厂家的SDK都会有接口文档提供,海康工业相机SDK的接口文档路径如下,下面会介绍如何通过接口文档实现自己的接口方法
5.1 获取相机SN枚举(枚举相机)
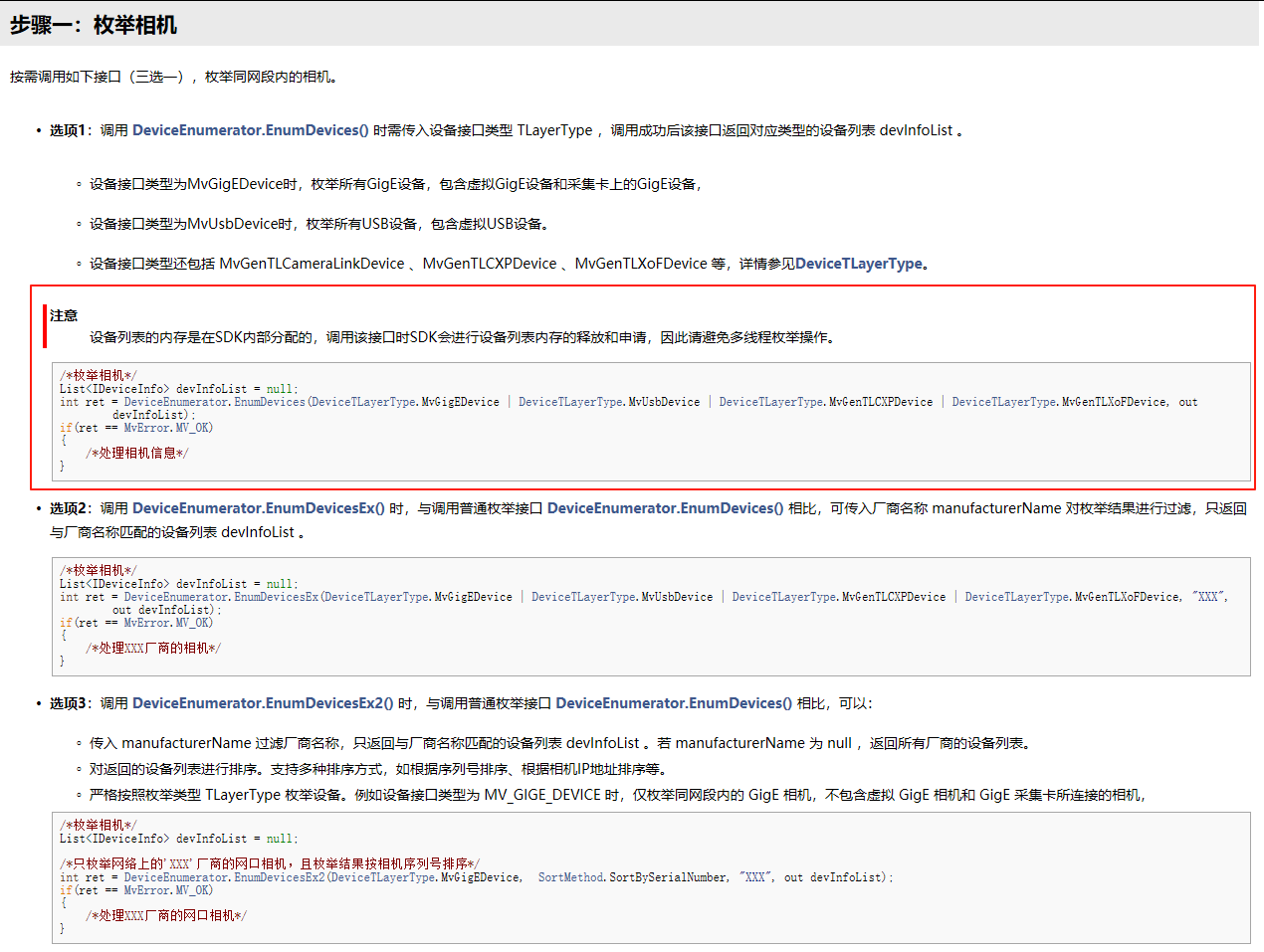
参考SDK接口文档的选项1枚举相机,返回相机SN队列List< string >
csharp
public override List<string> GetListEnum()
{
List<string> deviceList = new List<string>();
foreach (var item in GetListInfoEnum())
{
IDeviceInfo deviceInfo = item;
if (deviceInfo.UserDefinedName != "")
deviceList.Add(deviceInfo.SerialNumber);
else
deviceList.Add(deviceInfo.SerialNumber);
}
return deviceList;
}
private List<IDeviceInfo> GetListInfoEnum()
{
System.GC.Collect();
deviceInfoList.Clear();
// ch:创建设备列表 | en:Create Device List
int nRet = DeviceEnumerator.EnumDevices(enumTLayerType, out deviceInfoList);
if (nRet != MvError.MV_OK)
{
ShowErrorMsg("Enumerate devices fail!", nRet);
return new List<IDeviceInfo>();
}
return deviceInfoList;
}IDeviceInfo中包含了相机的SerialNumber序列号(SN)
为了方便调用只将相机的SN进行了返回
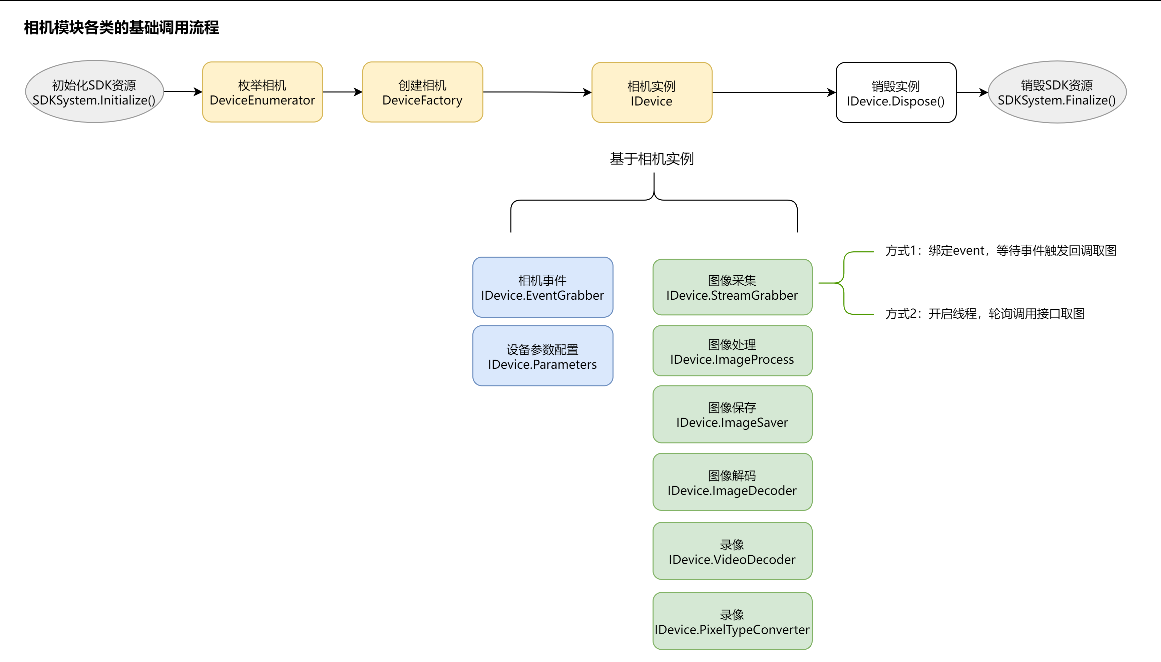
5.2初始化相机(创建相机实例打开相机)
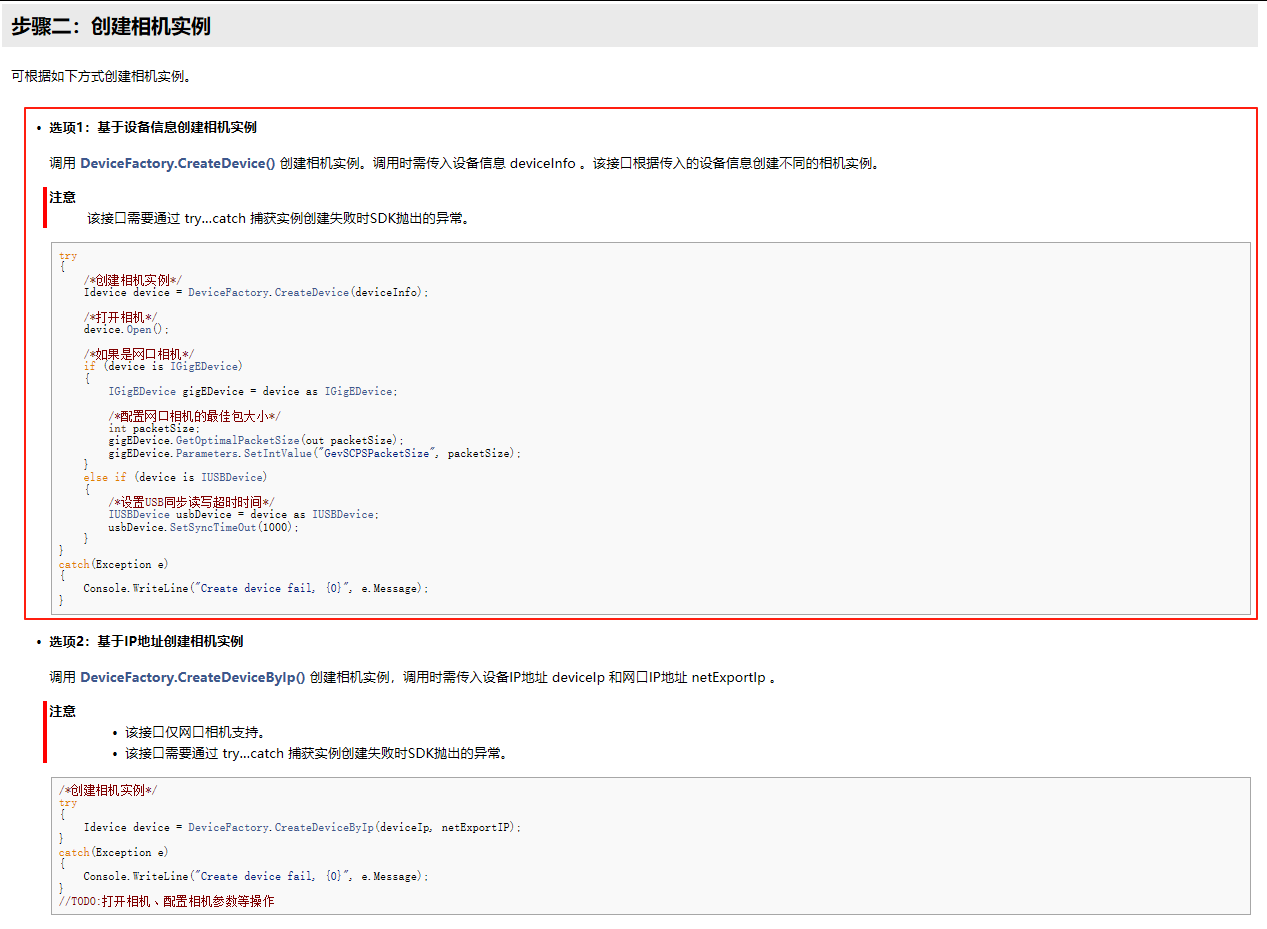
创建相机实例也就是打开相机并且占用相机资源
csharp
public override bool InitDevice(string CamSN, object handle = null)
{
try
{
int nRet;
if (string.IsNullOrEmpty(CamSN)) return false;
var infolist = GetListInfoEnum();
if (infolist.Count < 1) return false;
IDeviceInfo deviceInfo = infolist[0];
bool selectSNflag = false;
foreach (var item in infolist)
{
if (item.SerialNumber.Equals(CamSN))
{
deviceInfo = item;
selectSNflag = true;
break;
}
}
if (!selectSNflag) return false;
try
{
// ch:打开设备 | en:Open device
device = DeviceFactory.CreateDevice(deviceInfo);
}
catch (Exception ex)
{
MessageBox.Show("Create Device fail!" + ex.Message);
return false;
}
nRet = device.Open();
if (nRet != MvError.MV_OK)
{
ShowErrorMsg("Open Device fail!", nRet);
return false;
}
// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
if (device is IGigEDevice)
{
int packetSize;
nRet = (device as IGigEDevice).GetOptimalPacketSize(out packetSize);
if (packetSize > 0)
{
nRet = device.Parameters.SetIntValue("GevSCPSPacketSize", packetSize);
if (nRet != MvError.MV_OK)
Console.WriteLine("Warning: Set Packet Size failed {0:x8}", nRet);
else
Console.WriteLine("Set PacketSize to {0}", packetSize);
}
else
Console.WriteLine("Warning: Get Packet Size failed {0:x8}", nRet);
}
// ch:设置触发模式为On || en:set trigger mode as On
// 设置为Off会一直触发回调
SetTriggerMode(TriggerMode.On, TriggerSource.Software);
device.Parameters.SetEnumValueByString("AcquisitionMode", "Continuous");
// ch:注册回调函数 | en:Register image callback
// 注册回调函数操作应放在打开采集流操作之前
device.StreamGrabber.FrameGrabedEvent += CallBackEventHandler;
if (nRet != MvError.MV_OK)
{
Console.WriteLine("Set TriggerMode failed:{0:x8}", nRet);
return false;
}
if (!StartGrabbing())
{
Console.WriteLine("开始采集失败");
return false;
}
//ch: 设置合适的缓存节点数量 | en: Setting the appropriate number of image nodes
device.StreamGrabber.SetImageNodeNum(5);
SN = CamSN;
Brand = CameraBrand.HikCamera;
return true;
}
catch { return false; }
}1.初始化相机最主要的就是SN,通过枚举相机匹配到对应相机的IDeviceInfo
2.创建并打开相机后进行设备参数配置和图像采集绑定Event
3.设备参数配置将设置为软触发模式
4.图像采集绑定Event订阅了CallBackEventHandler函数
5.相机开始采集成功确认SN与品牌
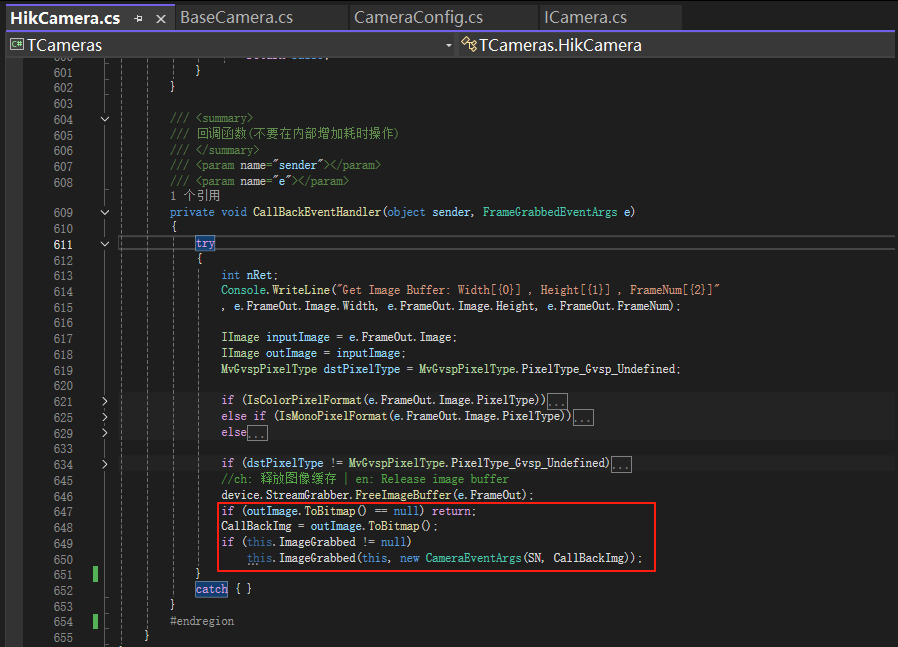
5.3 回调函数(图像采集Event)
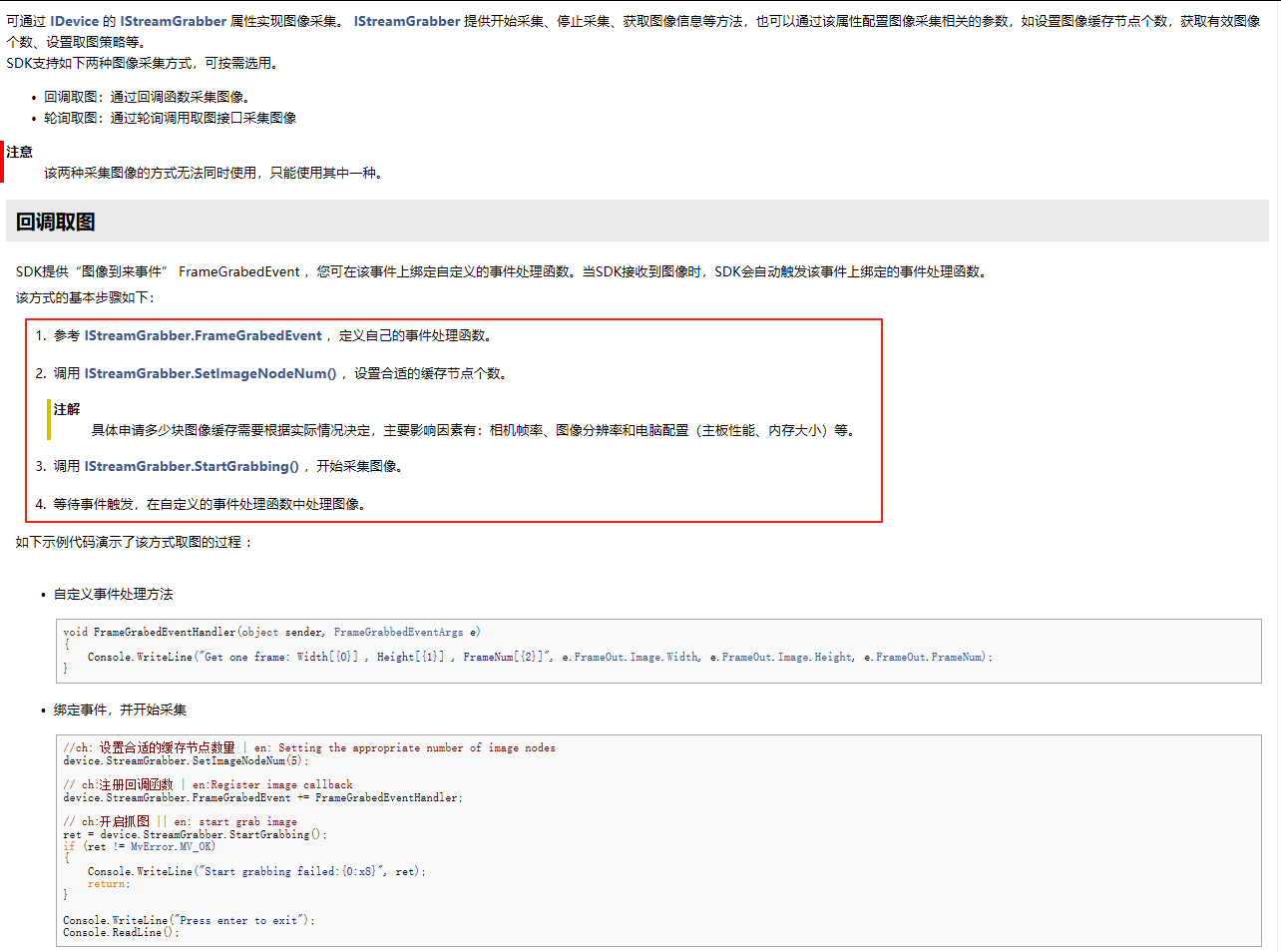
被事件订阅的回调函数在每次帧结束后被触发
/// <summary>
/// 回调函数(不要在内部增加耗时操作)
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void CallBackEventHandler(object sender, FrameGrabbedEventArgs e)
{
try
{
int nRet;
Console.WriteLine("Get Image Buffer: Width[{0}] , Height[{1}] , FrameNum[{2}]"
, e.FrameOut.Image.Width, e.FrameOut.Image.Height, e.FrameOut.FrameNum);
IImage inputImage = e.FrameOut.Image;
IImage outImage = inputImage;
MvGvspPixelType dstPixelType = MvGvspPixelType.PixelType_Gvsp_Undefined;
if (IsColorPixelFormat(e.FrameOut.Image.PixelType))
{
dstPixelType = MvGvspPixelType.PixelType_Gvsp_RGB8_Packed;
}
else if (IsMonoPixelFormat(e.FrameOut.Image.PixelType))
{
dstPixelType = MvGvspPixelType.PixelType_Gvsp_Mono8;
}
else
{
Console.WriteLine("Don't need to convert!");
}
if (dstPixelType != MvGvspPixelType.PixelType_Gvsp_Undefined)
{
// ch:像素格式转换 | en:Pixel type convert
nRet = device.PixelTypeConverter.ConvertPixelType(inputImage, out outImage, dstPixelType);
if (nRet != MvError.MV_OK)
{
Console.WriteLine("Image Convert failed:{0:x8}", nRet);
return;
}
Console.WriteLine("Image Convert success!");
}
//ch: 释放图像缓存 | en: Release image buffer
device.StreamGrabber.FreeImageBuffer(e.FrameOut);
if (outImage.ToBitmap() == null) return;
CallBackImg = outImage.ToBitmap();
if (this.ImageGrabbed != null)
this.ImageGrabbed(this, new CameraEventArgs(SN, CallBackImg));
}
catch { }
}1.BaseCamera基类中定义了事件public EventHandler< CameraEventArgs > ImageGrabbed = delegate { };
2.CameraEventArgs含有取图完成的相机SN与单帧图片等信息可自由扩展
3.回调的图片存储在CallBackImg变量中可用于软触发回调
4.返回的图片统一为Bitmap格式通用性强
Step6 调用封装的DLL实现取图
6.1创建工程并引用DLL
创建TestTCameras工程,引用TCameras工程生成的.dll
6.2设计演示窗口
演示窗口只包含了最基础的操作:
1、(Form1_Load)打开窗体时显示可用相机到combox1中
2、(button1_Click)点击button1连接相机
3、(button2_Click)点击button2软触发取图
4、(Form1_FormClosing)关闭窗口前断开已连接的相机
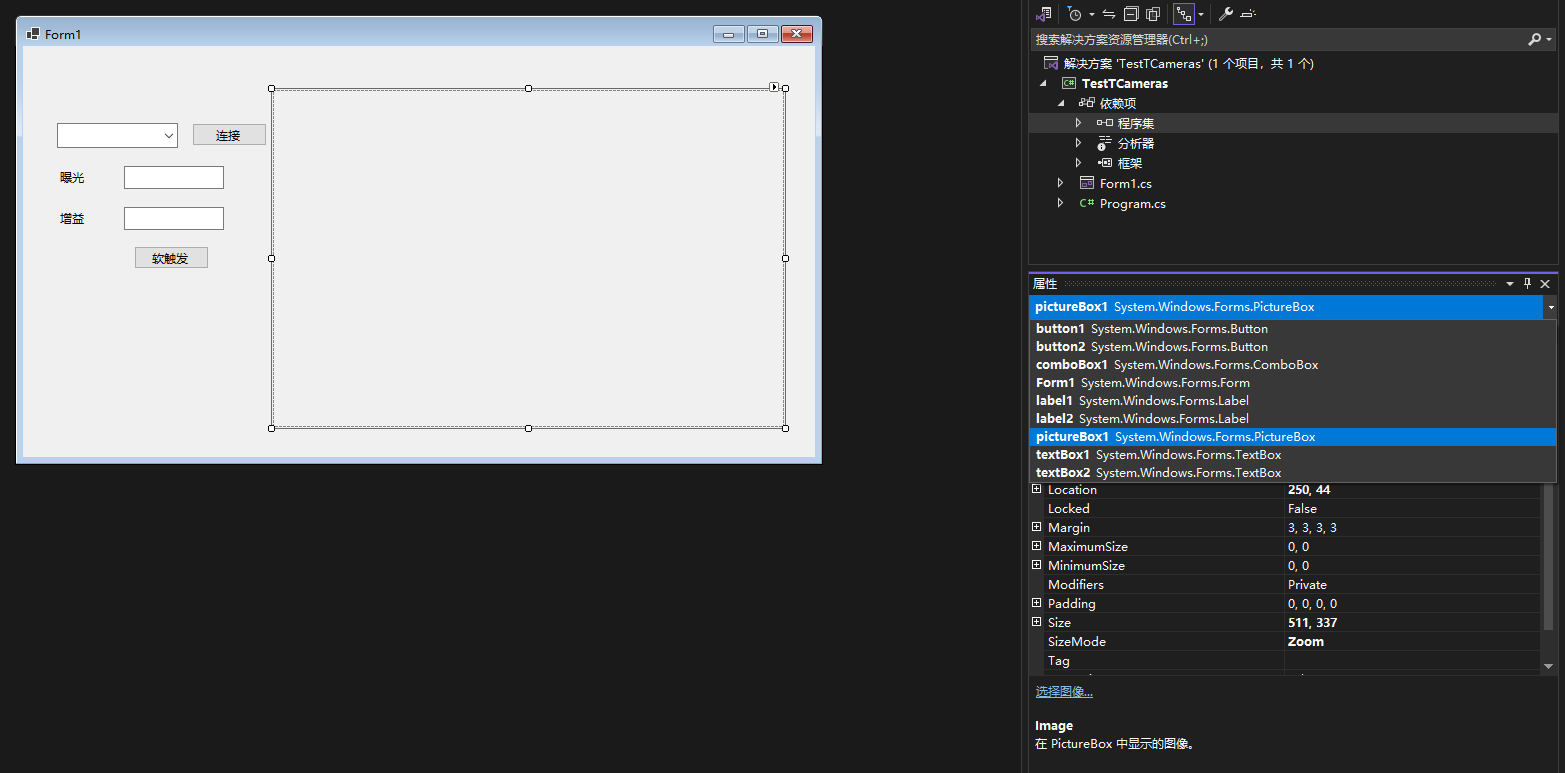
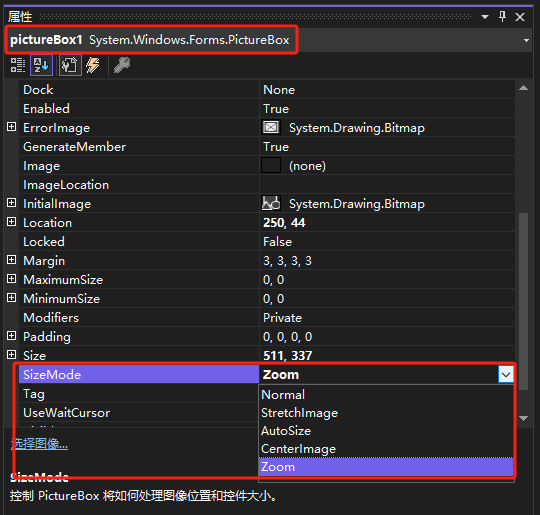
picturbox的SizeMode属性需要设置为Zoom否则无法显示完整
6.3演示窗口代码
csharp
using System.Xml.Linq;
using TCameras;
namespace TestTCameras
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
BaseCamera camera = new HikCamera();
private void Form1_Load(object sender, EventArgs e)
{
List<string> lstSN = camera.GetListEnum();
comboBox1.Items.Clear();
foreach (var sn in lstSN)
comboBox1.Items.Add(sn);
}
private void Form1_FormClosing(object sender, FormClosingEventArgs e)
{
if (camera != null || camera.isGrabbing)
camera.Dispose();
}
private void button1_Click(object sender, EventArgs e)
{
if (camera != null && camera.isGrabbing)
{
camera.CloseDevice();
camera = new HikCamera();
}
string sn = comboBox1.Text;
if (camera.InitDevice(sn, this.Handle))
{
camera.GetExpouseTime(out float exp);
camera.GetGain(out float gain);
textBox1.Text = exp.ToString();
textBox2.Text = gain.ToString();
MessageBox.Show($"[{sn}]连接成功");
}
}
private void button2_Click(object sender, EventArgs e)
{
if (camera == null || !camera.isGrabbing)
{
MessageBox.Show($"相机未连接");
return;
}
if (float.TryParse(textBox1.Text, out float exp) && float.TryParse(textBox2.Text, out float gain))
{
camera.SetExpouseTime(exp);
camera.SetGain(gain);
if (camera.GetImageWithSoftTrigger(out Bitmap bitmap))
{
pictureBox1.Image = bitmap;
}
else
MessageBox.Show($"获取图像失败");
}
}
}
}6.4效果展示
相机SDK封装取图