视频讲解:
复刻低成本机械臂 SO-ARM100 单关节控制(附代码)
代码仓库:GitHub - LitchiCheng/SO-ARM100: Some Test code on SO-ARM100
昨天用bambot的web的方式调试了整个机械臂,对于后面的仿真的sim2real来说,还是需要单独封装好这些控制,方便后面迁移到其他的测试平台中。
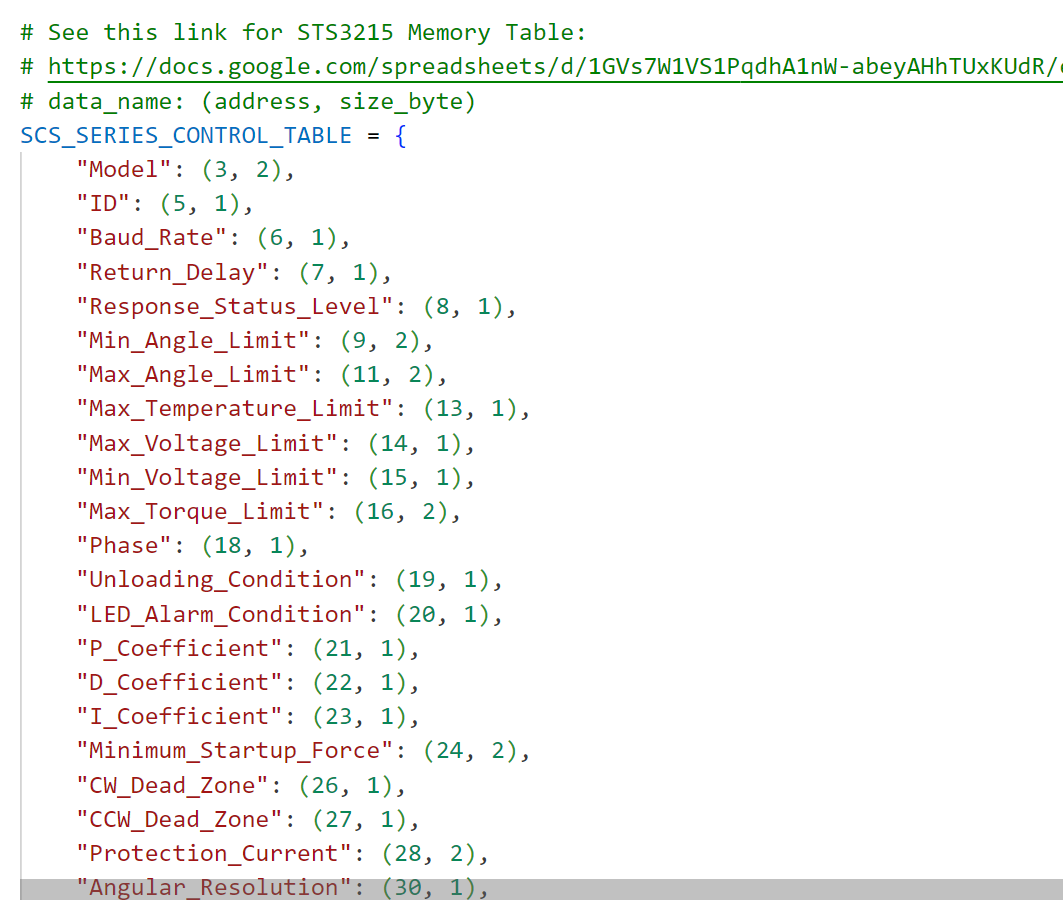
翻了lerobot的代码,可以看到对于feetech舵机的控制等封装已经挺完善,本质就是通过串口和舵机进行协议通信,这个在 lerobot/lerobot/common/robot_devices/motors/feetech.py 中可以看下相应的寄存器定义
接下来我们就针对lerobot这部分代码进行测试,测试单个关节的运动,首先是创建一个FeetechMotor的类,传入port和id就就可以方便的调试某个电机
import sys
import os
import time
parent_dir = os.path.dirname(os.path.dirname(os.path.abspath(__file__)))
sys.path.append(parent_dir)
from feetech import FeetechMotorsBusConfig
from feetech import FeetechMotorsBus
class FeetechMotor:
def __init__(self, motor_id, port="/dev/ttyACM0"):
motors={
# name: (index, model)
"shoulder_pan": [1, "sts3215"],
"shoulder_lift": [2, "sts3215"],
"elbow_flex": [3, "sts3215"],
"wrist_flex": [4, "sts3215"],
"wrist_roll": [5, "sts3215"],
"gripper": [6, "sts3215"],
},
self.motor_id = motor_id
self.motors_bus = FeetechMotorsBus(FeetechMotorsBusConfig(
port=port,
motors=motors,
))
self.motors_bus.connect()
def setPosition(self, position):
self.motors_bus.write_with_motor_ids(self.motors_bus.motor_models, self.motor_id, "Goal_Position", position)
def getPosition(self):
return self.motors_bus.read_with_motor_ids(self.motors_bus.motor_models, self.motor_id, "Present_Position")
def close(self):
self.motors_bus.disconnect()实验测试目标,让某个关节往复运动,声明一个函数generatePositionSequence用来生成位置的序列
def generatePositionSequence(start_position, range_value, loops=1):
sequence = []
for _ in range(loops):
forward_positions = list(range(start_position, start_position + range_value + 1))
sequence.extend(forward_positions)
backward_positions = list(range(start_position + range_value - 1, start_position - 1, -1))
sequence.extend(backward_positions)
return sequence执行部分,指定电机id和串口名称,开始让电机运动到2048也就是中间的位置,然后再开始往复运动
if __name__ == "__main__":
motor = FeetechMotor(5, "/dev/ttyACM0")
motor.setPosition(2048)
time.sleep(1)
start_position = motor.getPosition()
print(f"Start position: {start_position}")
range_val = 600
loop_count = 10
result = generatePositionSequence(start_position, range_val, loop_count)
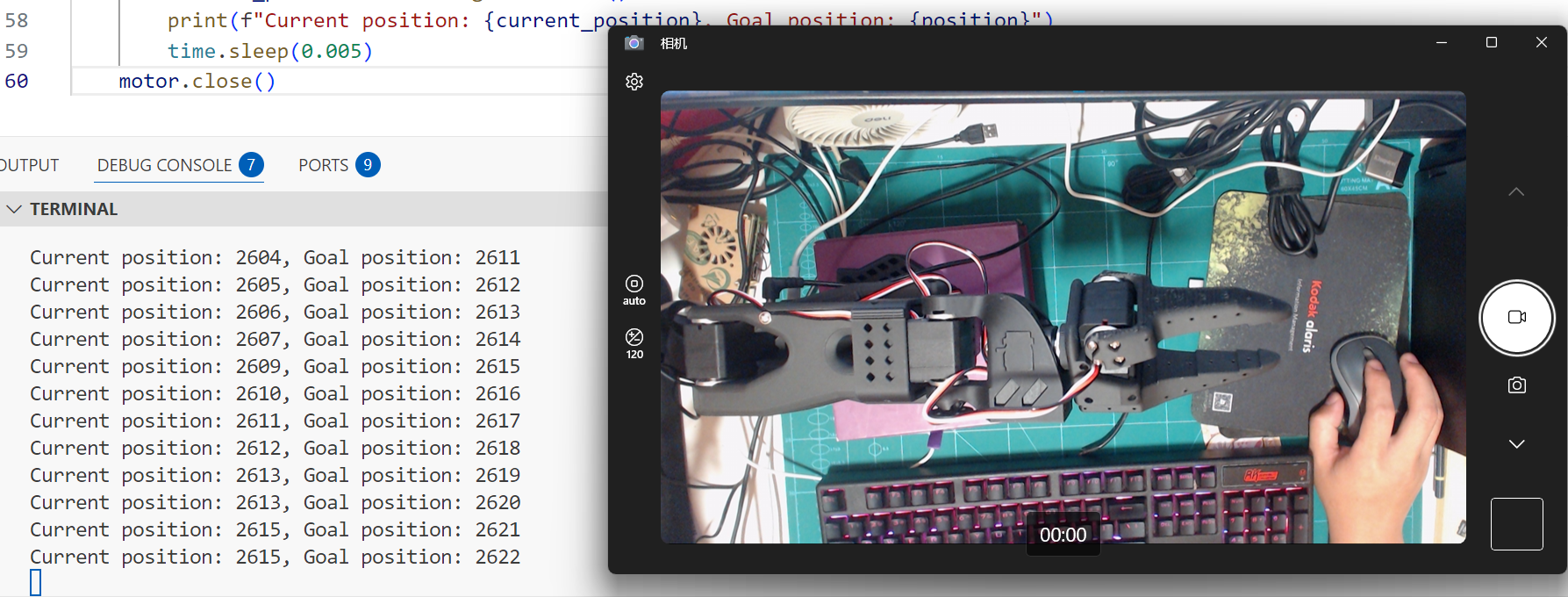
for position in result:
motor.setPosition(position)
current_position = motor.getPosition()
print(f"Current position: {current_position}, Goal position: {position}")
time.sleep(0.005)
motor.close()