目录
[(1)Atlas 工作流](#(1)Atlas 工作流)
[(2)UE Plugin 工作流](#(2)UE Plugin 工作流)
随着自动驾驶技术走向高阶智能化 以及法律法规的逐渐完善,仿真测试 将会成为ADAS/AD 研发流程的必不可少的环节。标准化接口 与数据格式不仅提升了测试效率,更成为推动产业协同的关键基石。
康谋 aiSim 深度集成ASAM OpenX 系列标准 ,构建了高度兼容、高度还原的自动驾驶仿真平台。本文将从五大核心标准切入,系统解读 aiSim 如何通过标准化接口,全面支持自动驾驶仿真各环节。
一、OpenDRIVE:兼容多版本地图标准
ASAM OpenDRIVE 是自动驾驶仿真中最常用的道路拓扑标准, 用于描述路网结构、几何形态及拓扑关系,采用 XML 格式,扩展名为 .xodr。aiSim 支持 OpenDRIVE 1.4 至 1.7 版本 ,并提供双工作流以满足不同使用场景:
(1)Atlas 工作流
基于自研 Atlas 工具链 ,适用于快速搭建交通场景及行为测试流程,道路信息以逻辑形式加载,不参与实时渲染,能够实现高效构建、快速测试。
(2)UE Plugin 工作流
面向UE开发的aiSim插件,适用于数字孪生仿真 与可视化场景搭建 ,地图导入时完成高保真渲染,便于添加静态资产与视觉验证,真实感强、适合高精还原。
aiSim的灵活地图导入能力,不仅提升仿真效率,更帮助用户在开发早期快速实现从测试到交付的闭环。
二、OpenSCENARIO:标准化动态行为建模
**ASAM OpenSCENARIO(.xosc)**定义了交通参与者的行为、事件与触发机制,是仿真场景动态建模的核心标准。
aiSim 支持 OpenSCENARIO 1.2,具备以下优势:
a. 桌面版与云端 GUI 场景编辑器支持交互式构建,所见即所得;
b. 可描述复杂的车、人、交通灯、静态物体之间的行为交互;
c. 支持导出每次仿真过程的 EvaluationResult,便于结果记录与对比。
如构建一个典型的 cut-in 场景,用户只需在编辑器中完成参数配置,即可自动生成可复现场景文件,大幅简化开发流程。
aiSim用标准构建动态场景、用结果衡量系统能力,助力自动驾驶功能闭环验证
三、OpenCRG:还原毫米级路面细节
OpenCRG提供标准化方式描述道路表面细节,支持毫米级不规则地形建模,用于动力学仿真与轮胎接触等精细化测试。CRG 文件使用二维 UV 网格系统,描述每个点的精确高程信息。
aiSim 在导入OpenDRIVE 地图时自动解析 符合条件(purpose = elevation,mode = global)的 CRG 元素,提升仿真中的道路表面真实度。
a. 用户导入地图时可启用"应用 CRG 元素"选项,自动映射高程信息。
b. 支持设置横纵向最小增量值,控制网格精度,最小支持毫米级,显著提升仿真保真度。精准路面建模,进一步增强地形还原与物理行为一致性。
从低到高增量值下OpenDRIVE地形的变化
四、OpenMATERIAL:更真实的感知仿真
在感知仿真中,物理材质决定了相机/激光雷达的真实响应,OpenMATERIAL 提供统一材质描述标准,链接 3D 几何与真实物理属性,实现更贴近真实的感知仿真环境。
aiSim 已初步集成 OpenMATERIAL,支持在传感器仿真中对材质反射、纹理、透明度等进行高保真建模。
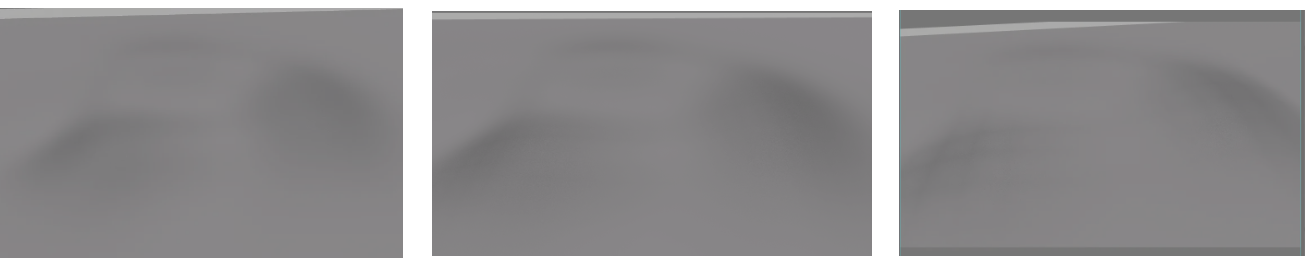
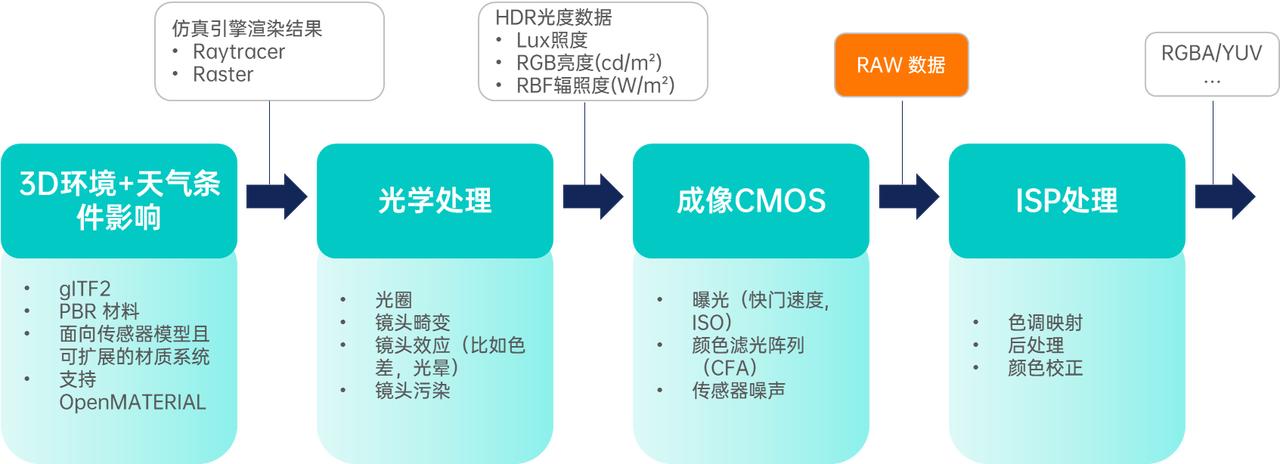
在 aiSim 中,材质信息被高度还原并用于物理传感器模拟,特别适用于摄像头模型的成像仿真。通过 OpenMATERIAL 标准,aiSim 能够提供更准确的光照 、色彩与纹理响应,为感知算法的训练与验证创造更接近真实世界的环境。
我们还开源了基于 OpenMATERIAL 构建的aiSim Archer 车辆模型,包含:
a. 超过 140k 多边形精度建模
b. 全 UV 展开与规范命名
c. 23 个可控灯光节点
d. 包含 glTF 材质与 .xoma 文件
e. 以及额外的法线贴图与细节纹理提升视觉质量

五、OSI:标准化环境接口
ASAM Open Simulation Interface(OSI) 为自动驾驶系统提供通用"环境感知输入接口",用于传输仿真中感知相关数据。标准基于 Protocol Buffers,结构清晰、模块可扩展。
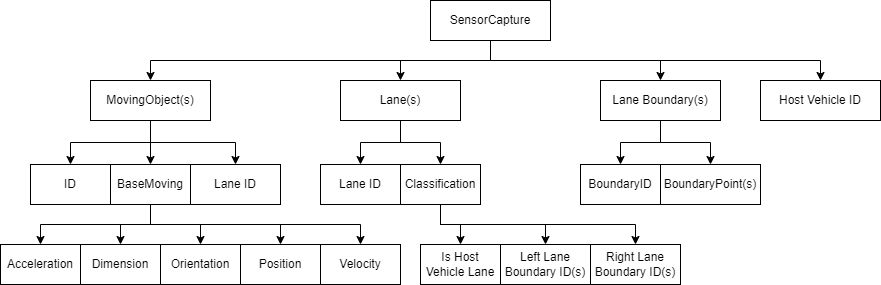
在aiSim 中,OSI 被用于输出高频率、高一致性的 Ground Truth 数据,包括:
a. 自车及他车的位置、姿态、速度、加速度等状态
b. 所在车道信息及边界点分布
c. 持续每步仿真中生成并记录,支持全流程回溯
同时,aiSim 提供两种查询方式:
**a. GetAllOSIGT:**获取全部仿真过程中的 GT 数据(带时间戳)
**b. GetLastStepsOSIGT:**仅获取最新一步仿真数据,便于实时监控
aiSim的模块化输出 + 高效接口,从仿真生成到算法验证的无缝衔接,大幅提升测试流程的规范化与自动化程度。
六、总结
在自动驾驶迈向规模化落地的关键阶段,开放、标准化、可复现的仿真能力是保障算法稳定性与法规符合性的核心基础。
aiSim 将持续深度适配ASAM OpenX 生态,联动OpenDRIVE构图、OpenSCENARIO 场景定义、OpenMATERIAL 材质标准、OSI 接口协议等核心能力,为行业客户提供更高质量、更高效率的仿真解决方案。
我是分享自动驾驶技术的康谋
期待与您的的探讨学习
欢迎关注互动
aiSim自动驾驶仿真平台 - 端到端智驾仿真工具 | 高保真环境模拟和场景重建 | 软件在环测试 | 康谋科技![]() https://keymotek.com/adas-simulator-aisim/
https://keymotek.com/adas-simulator-aisim/