机器人手术历经多阶段技术演进,已成为现代医疗重要方向。其需求增长源于医疗机构对高精度低风险手术方案的需求、微创手术普及及技术进步带来的复杂场景适应性提升。Kinova 轻型机械臂凭借模块化设计与即插即用功能,可快速适配不同手术环境,为行业发展提供新助力。
灵活性与精准性
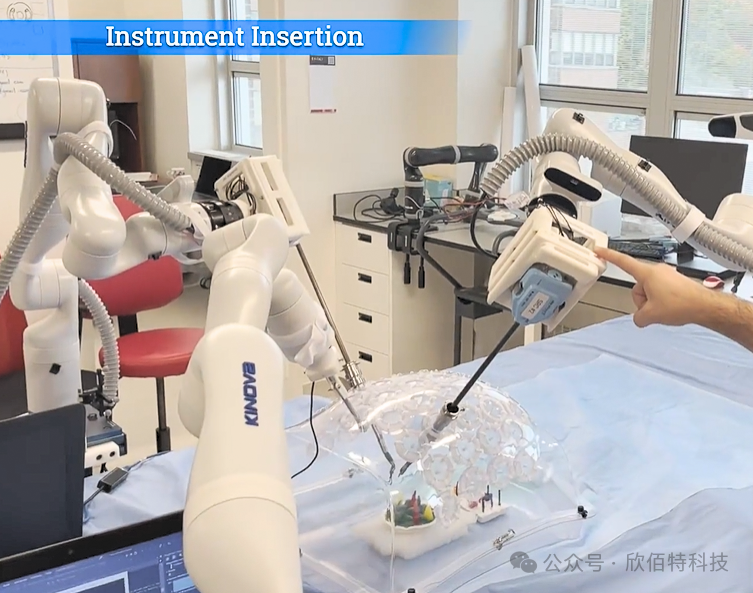
Kinova轻型机械臂拥有7自由度设计,能够在狭小空间内灵活操作,满足多角度需求。优化的关节运动范围确保了动作自然流畅,使其在复杂的手术环境中表现出色。高分辨率传感器和先进运动控制算法满足了微创手术的高标准要求,实时数据反馈机制保证了手术过程中的稳定性和安全性。
模块化设计与即插即用功能
采用模块化架构,Kinova轻型机械臂支持单独更换或升级各组件,降低了维护成本并提升了设备扩展性。医疗机构可以根据需要灵活配置功能模块,实现个性化解决方案。标准化接口使得Kinova能够快速集成到不同手术系统中,减少了安装时间和学习曲线,提高了手术室的工作效率。
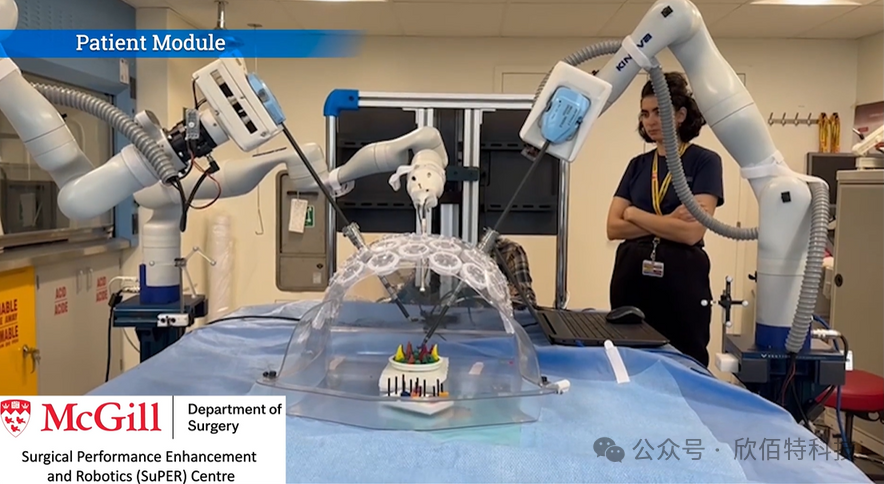 麦吉尔大学外科相关中心研发的手术机器人多机械臂协同模拟手术场景。
麦吉尔大学外科相关中心研发的手术机器人多机械臂协同模拟手术场景。
材料优势
选用碳纤维材料,Kinova轻型机械臂实现了轻量化与载荷均匀性的高效协同,相比传统铝合金和钢铁材料性能更优。

安全与协作
Kinova通过AI驱动的碰撞检测算法和高精度传感器,在多机器人协作中实现了实时碰撞预警和动态调整,保护了患者和其他设备的安全。自主研发的触觉反馈系统为医生提供了真实的操作体验,增强了决策速度和协作效率。
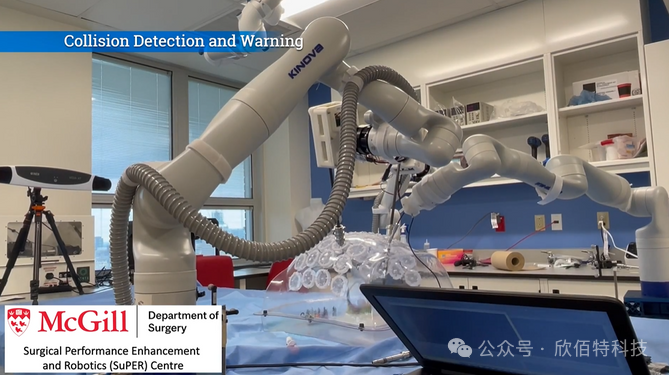 Kinova机械臂在手术模拟场景下,通过先进算法和传感器实现碰撞检测与预警,保障手术操作安全。
Kinova机械臂在手术模拟场景下,通过先进算法和传感器实现碰撞检测与预警,保障手术操作安全。
应用实例
在腹腔镜手术中,多个Kinova轻型机械臂可以同时执行不同的任务,如组织牵引、切割和缝合,显著提高了手术效率,并减轻了医生的负担。云端平台的支持实现了远程更新和维护,确保设备始终处于良好运行状态,降低了维护成本。
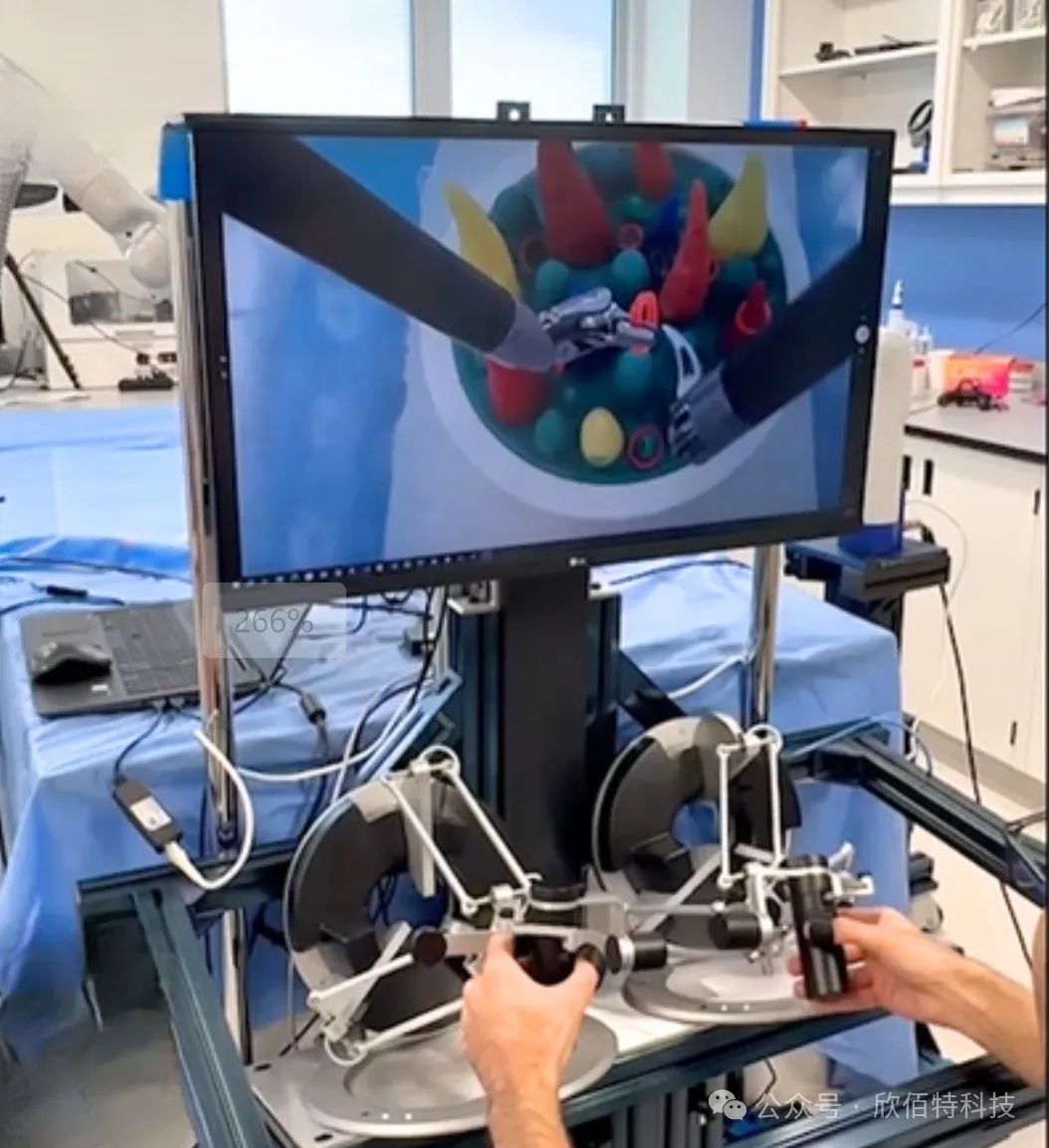 操作人员通过控制设备远程操控手术机器人,屏幕实时呈现手术内部视野
操作人员通过控制设备远程操控手术机器人,屏幕实时呈现手术内部视野
Kinova轻型机械臂在微创手术中的表现,展现了其在灵活性、精确性和安全性方面的实力。随着技术的发展,它将继续推动医疗领域的革新,特别是在多机器人协作方面。
FAQ
什么是Kinova轻型机械臂的主要技术优势?
Kinova轻型机械臂具备7自由度设计、模块化架构和即插即用功能。其高精度传感器和先进的运动控制算法确保了亚毫米级的定位精度。这些特点使其在复杂手术环境中表现出卓越的灵活性和精确性。
Kinova轻型机械臂如何提升微创手术的效率?
通过实时数据反馈和稳定触觉反馈技术,Kinova轻型机械臂能够快速调整操作策略。其多任务协作能力减少了手术时间,同时降低了医生的工作负担,从而显著提升了手术效率。
多机器人协作中如何确保安全性?
Kinova轻型机械臂集成了AI驱动的碰撞检测算法和高精度传感器。它能够实时检测潜在风险并动态调整运动轨迹,避免碰撞。此外,其设计符合严格的安全性能指标,确保手术过程的安全性。
Kinova轻型机械臂是否适用于所有类型的手术?
Kinova轻型机械臂主要适用于微创手术,如腹腔镜手术。其模块化设计和即插即用功能使其能够快速适应不同的手术场景,但具体适用性需根据手术类型和医疗机构需求评估。
医疗机构如何部署Kinova轻型机械臂?
Kinova轻型机械臂支持即插即用功能,部署过程简单。通过标准化接口和模块化设计,医疗机构无需复杂编程即可快速集成设备。此外,云端平台提供远程更新和维护支持,进一步简化了部署流程。