视频讲解:RISC-V 开发板 MUSE Pi Pro OpenCV结合Gstreamer实时显示CSI摄像头_哔哩哔哩_bilibili
RISC-V 开发板 MUSE Pi Pro OpenCV结合Gstreamer实时显示CSI摄像头
安装opencv相关库
sudo apt install libopencv-dev python3 python3-opencv测试使用的CSI摄像头为ov5647,官方示例如下,其中json包括csi型号不同需要修改下
import cv2
gst_str = 'spacemitsrc location=/home/bianbu/camtest_ov16a10.json close-dmabuf=1 ! video/x-raw,format=NV12,width=1280,height=720 ! appsink'
cap = cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER) # 打开默认的摄像头
while True:
ret, frame = cap.read() # 读取视频帧
frame = cv2.cvtColor(frame, cv2.COLOR_YUV2BGR_NV12)
cv2.imshow('Video', frame) # 显示视频帧
if cv2.waitKey(1) & 0xFF == ord('q'): # 按下 'q' 键退出循环
break
cap.release() # 释放摄像头
cv2.destroyAllWindows() # 关闭所有窗口需要将gst_str中json文件的位置修改为如下:
gst_str = 'spacemitsrc location=/usr/share/camera_json/csi3_camera_auto.json close-dmabuf=1 ! video/x-raw,format=NV12,width=1920,height=1080 ! appsink'完整修改如下:
import cv2
gst_str = 'spacemitsrc location=/usr/share/camera_json/csi3_camera_auto.json close-dmabuf=1 ! video/x-raw,format=NV12,width=1920,height=1080 ! appsink'
cap = cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER) # 打开默认的摄像头
while True:
ret, frame = cap.read() # 读取视频帧
frame = cv2.cvtColor(frame, cv2.COLOR_YUV2BGR_NV12)
cv2.imshow('Video', frame) # 显示视频帧
if cv2.waitKey(1) & 0xFF == ord('q'): # 按下 'q' 键退出循环
break
cap.release() # 释放摄像头
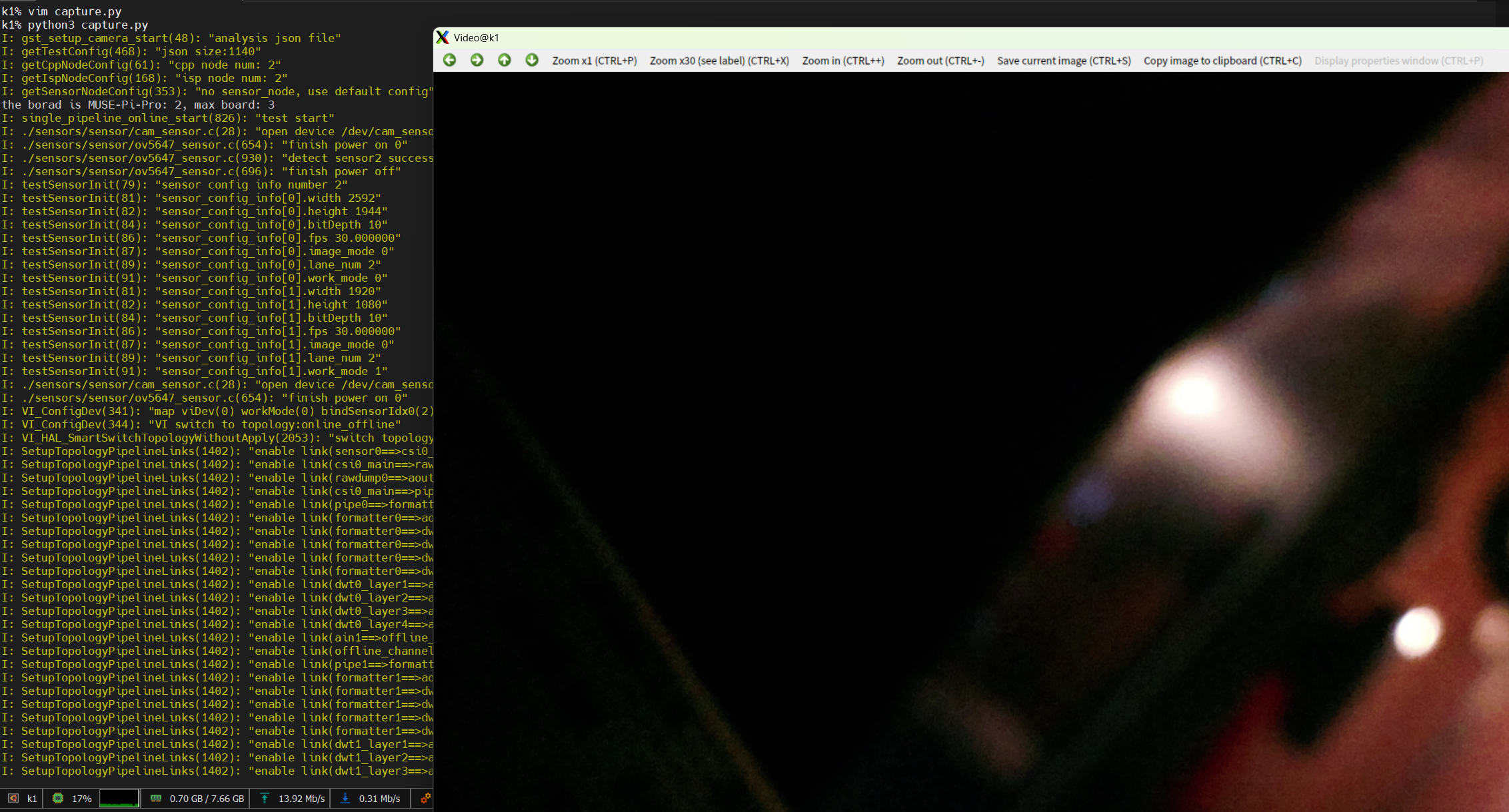
cv2.destroyAllWindows() # 关闭所有窗口非桌面段的话,会起一个Remote X窗口用来显示,虽然有点卡