目录
[1. CAN总线(Controller Area Network)](#1. CAN总线(Controller Area Network))
[2. LIN总线(Local Interconnect Network)](#2. LIN总线(Local Interconnect Network))
[3. FlexRay总线](#3. FlexRay总线)
[4. MOST总线(Media Oriented Systems Transport)](#4. MOST总线(Media Oriented Systems Transport))
[5. 车载以太网(Automotive Ethernet)](#5. 车载以太网(Automotive Ethernet))
[6. 其他专用总线](#6. 其他专用总线)
一、汽车总线技术概述
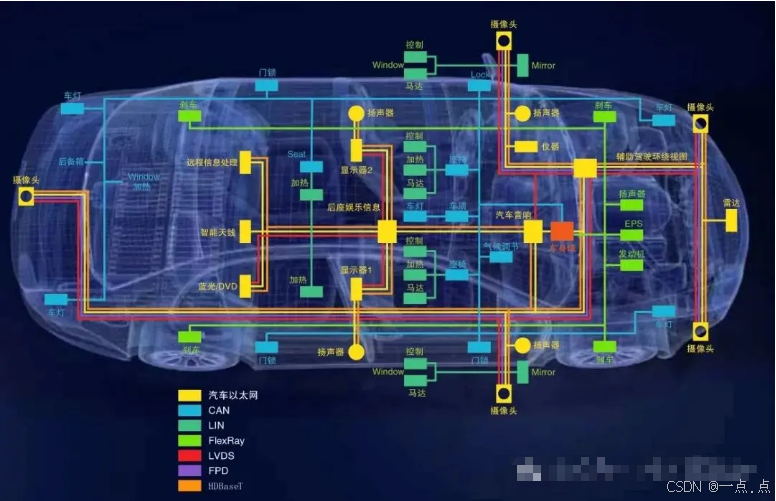
汽车总线是车载电子系统的通信骨架,用于实现ECU(电子控制单元)之间的数据传输。随着汽车电子化、智能化发展,总线技术逐步演进,形成多种协议并存的分层架构。
二、主流汽车总线技术对比分析
1. CAN总线(Controller Area Network)
-
技术特性:
-
物理层:双绞线差分信号,支持总线型拓扑。
-
数据速率:经典CAN(CAN 2.0)最高1 Mbps,CAN FD(灵活数据速率)可达5 Mbps。
-
访问机制:基于优先级的CSMA/CA(载波侦听多路访问/冲突避免)。
-
帧结构:标准帧(11位ID)和扩展帧(29位ID)。
-
-
优点:
-
高可靠性:内置错误检测与重传机制。
-
低成本:广泛普及,硬件成本低。
-
实时性:满足多数控制场景需求。
-
-
缺点:
-
带宽受限,难以支持大数据量传输。
-
无时间同步机制,不适合高精度控制。
-
-
应用场景:
- 动力系统(发动机、变速箱)、车身控制(车门、灯光)、诊断系统(OBD)。
-
变种技术:
- CAN FD:提升数据场长度(64字节)和速率,用于ADAS传感器数据。
2. LIN总线(Local Interconnect Network)
-
技术特性:
-
物理层:单线传输,UART通信简化版。
-
数据速率:最高20 Kbps。
-
拓扑结构:主从模式,单一主节点控制通信。
-
-
优点:
-
超低成本,布线简单。
-
低功耗设计,适合低复杂度节点。
-
-
缺点:
-
带宽极低,仅支持简单控制指令。
-
无容错机制,可靠性较低。
-
-
应用场景:
- 车窗、雨刷、座椅调节等非关键子系统。
3. FlexRay总线
-
技术特性:
-
物理层:双通道冗余设计,支持星型或总线型拓扑。
-
数据速率:每通道10 Mbps,双通道可达20 Mbps。
-
访问机制:时间触发(TDMA)与事件触发混合模式。
-
-
优点:
-
高实时性:确定性的时间触发通信。
-
高可靠性:冗余通道支持故障容错。
-
-
缺点:
-
成本高,协议复杂度高。
-
配置复杂,开发周期长。
-
-
应用场景:
- 线控系统(Brake-by-Wire)、高端动力总成、主动悬架。
4. MOST总线(Media Oriented Systems Transport)
-
技术特性:
-
物理层:光纤或电气传输,环形拓扑。
-
数据速率:MOST25(25 Mbps)、MOST50(50 Mbps)、MOST150(150 Mbps)。
-
访问机制:同步时间槽分配。
-
-
优点:
-
高带宽,支持多媒体数据流。
-
低延迟,音视频同步能力强。
-
-
缺点:
-
成本高昂,扩展性受限。
-
环形拓扑单点故障影响全局。
-
-
应用场景:
- 车载信息娱乐系统(音频、视频)、导航系统。
5. 车载以太网(Automotive Ethernet)
-
技术特性:
-
物理层:双绞线(100BASE-T1、1000BASE-T1)或光纤。
-
数据速率:100 Mbps~10 Gbps(如10BASE-T1S)。
-
协议栈:基于TCP/IP,支持DoIP(诊断协议)。
-
-
优点:
-
超高带宽,支持自动驾驶大数据传输。
-
开放标准,兼容性强。
-
支持软件定义网络(SDN)。
-
-
缺点:
-
实时性需通过TSN(时间敏感网络)增强。
-
电磁兼容性(EMC)要求高。
-
-
应用场景:
- ADAS(摄像头、雷达)、智能座舱、OTA升级。
-
关键协议:
-
TSN:提供时间同步和低延迟保障。
-
AVB(音视频桥接):用于多媒体传输。
-
6. 其他专用总线
-
LVDS(低压差分信号):
- 用于摄像头/显示屏高速点对点传输(1-3 Gbps)。
-
SENT(单边半字传输协议):
- 低成本传感器数据传输(如压力、温度)。
三、总线技术对比总结
| 特性 | CAN | LIN | FlexRay | MOST | 车载以太网 |
|---|---|---|---|---|---|
| 速率 | ≤5 Mbps | ≤20 Kbps | ≤20 Mbps | ≤150 Mbps | ≤10 Gbps |
| 成本 | 低 | 极低 | 高 | 高 | 中等-高 |
| 实时性 | 中等 | 低 | 高 | 中等 | 高(TSN) |
| 可靠性 | 高 | 低 | 极高 | 中等 | 高 |
| 拓扑 | 总线型 | 主从链 | 星型/总线 | 环形 | 星型/混合 |
| 典型应用 | 车身控制 | 简单执行器 | 线控系统 | 多媒体 | ADAS/智能座舱 |
四、应用场景与选型建议
-
低复杂度控制:LIN > CAN(成本优先)。
-
高可靠性控制:FlexRay > CAN FD(动力/底盘)。
-
多媒体传输:MOST(传统车型)→ 车载以太网(新型架构)。
-
自动驾驶与智能网联:车载以太网 + TSN。
-
传感器网络:SENT(低速)、LVDS(高速)。
五、未来发展趋势
-
以太网主导:逐步替代CAN/LIN,成为主干网络。
-
TSN普及:解决实时性与带宽矛盾。
-
区域架构:Zonal架构简化布线,依赖高速总线。
-
无线通信:5G/V2X与有线总线协同。
通过以上分析可见,汽车总线技术呈现分层化、多元化的特点,未来将以以太网为核心,结合传统总线形成混合网络,以满足智能化、网联化的需求。
果此文章对您有所帮助,那就请点个赞吧,收藏+关注 那就更棒啦,十分感谢!!!