KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago)数据集是计算机视觉和自动驾驶领域中最广泛使用的基准数据集之一。它由德国卡尔斯鲁厄理工学院和美国芝加哥丰田技术研究所联合发布,旨在推动自动驾驶和移动机器人感知技术的发展。 
⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻
📦 数据集概览
KITTI 数据集通过在德国卡尔斯鲁厄市及其周边地区(包括城市、乡村和高速公路)驾驶配备多种传感器的车辆采集而成,涵盖了多种真实交通场景。
📷 传感器配置
• 立体摄像头:高分辨率 RGB 和灰度图像,用于立体视觉和图像处理任务。
• 3D 激光雷达(Velodyne HDL-64E):提供精确的三维点云数据。
• GPS 和 IMU:提供高精度的定位和姿态信息。  
所有数据都经过同步和校准,确保多传感器数据的一致性。 
⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻
🧪 支持的任务与基准测试
KITTI 数据集支持多种计算机视觉任务,并为每个任务提供了标准的评估基准:
• 立体匹配(Stereo Matching):估计图像对之间的视差,用于深度计算。
• 光流估计(Optical Flow):计算图像序列中像素的运动。
• 视觉里程计(Visual Odometry):估计相机在空间中的移动轨迹。
• 2D/3D 目标检测(Object Detection):识别和定位图像中的物体,如车辆、行人等。
• 目标跟踪(Object Tracking):在视频序列中跟踪物体的运动。
• 语义分割(Semantic Segmentation):对图像中的每个像素进行分类。
每个任务都有相应的评估指标和在线评估平台,方便研究人员比较算法性能。 
⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻
📊 数据规模与注释
• 图像数量:约 15,000 张图像,分为训练集和测试集。
• 注释信息:包括 2D 和 3D 边界框、物体类别、姿态信息等。
• 物体类别:涵盖 9 个类别,如汽车、行人、骑自行车者、卡车等。  
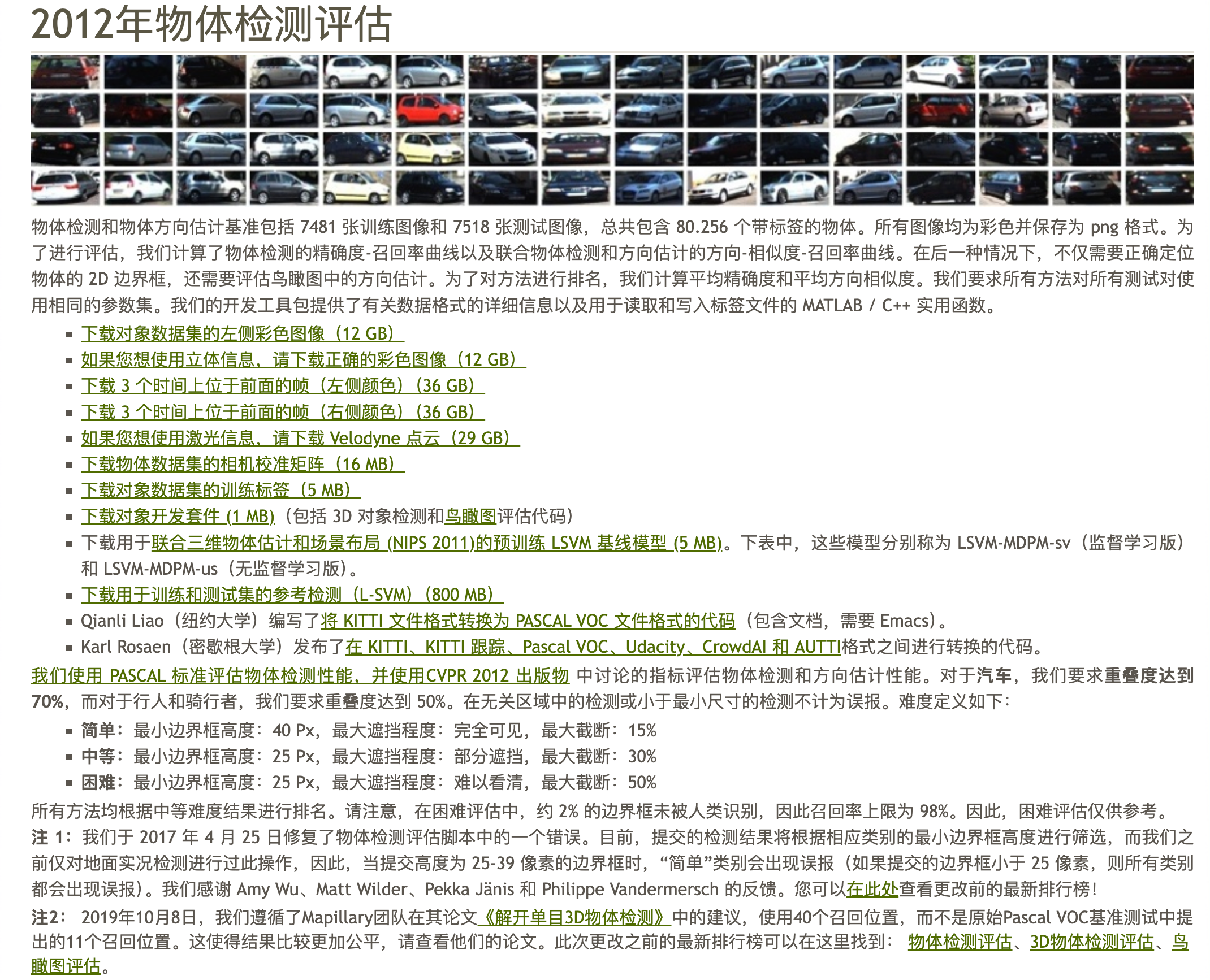
例如,目标检测任务包含 7,481 张训练图像和 7,518 张测试图像,共标注了 51,865 个物体实例。 
⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻
⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻
🔄 扩展数据集
为了满足更复杂的研究需求,KITTI 数据集还衍生出多个扩展版本:
• SemanticKITTI:在原始点云数据上添加了逐点的语义标签,支持语义分割任务。
• KITTI-360:提供更广泛的场景覆盖和更丰富的语义注释,支持 2D 和 3D 场景理解。 
这些扩展数据集进一步丰富了研究领域,促进了更高级别的感知和理解任务的发展。
⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻⸻
📥 获取方式
KITTI 数据集可通过官方网站免费下载,需先注册账号:
此外,部分数据集也可通过 AWS 开放数据注册表 访问,方便在云平台上进行处理。