1.安装turtlebot3运行gazebo仿真
在turtlebot3工程中执行
bash
roslaunch turtlebot3_gazebo turtlebot3_house.launch2.安装运行gmapping
在turtlebot3工程中执行
bash
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping3.启动move_base实现已知地图导航
安装move_base
bash
sudo apt install ros-noetic-navigation在turtlebot3工程中执行
bash
roslaunch turtlebot3_navigation move_base.launch验证是否可以用,在rviz中点2D Nav GOAL 选择一个已经探测到的区域。发现机器人开始运动。
4.安装运行explore_lite
bash
git clone https://github.com/hrnr/m-explore.git
catkin_make在explore_lite工程中执行
bash
roslaunch explore_lite explore.launch发现机器人能开始自动探索了。
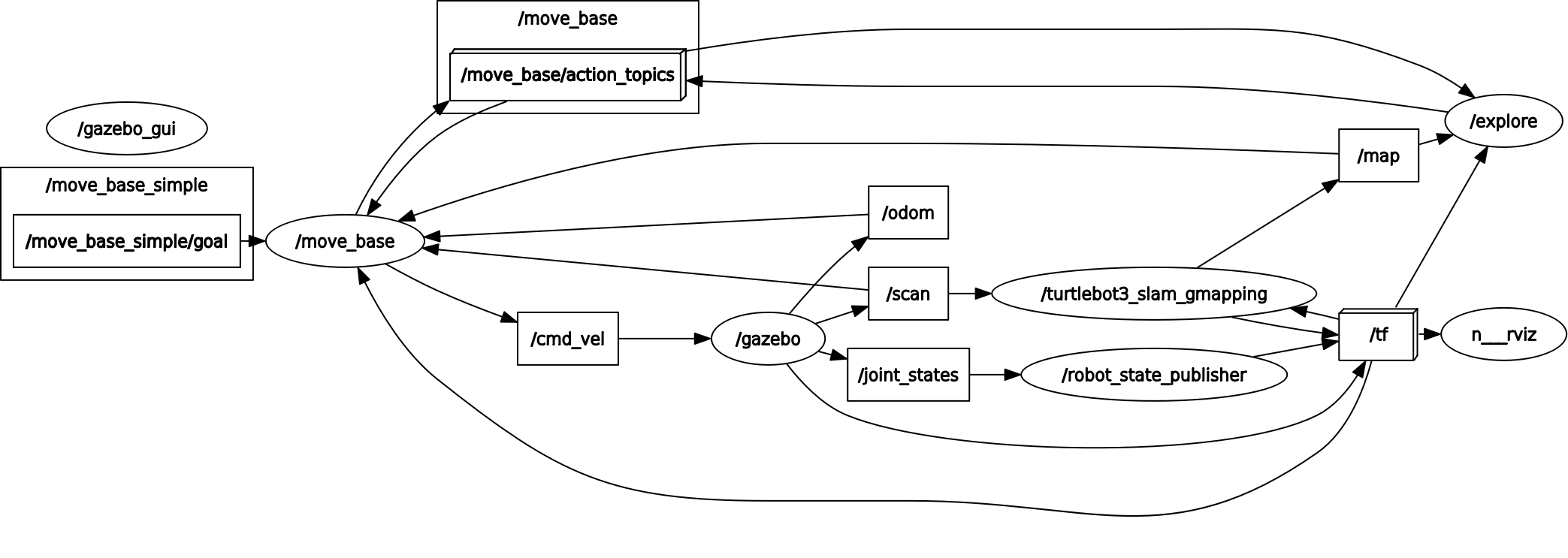
rqt_graph查看节点图如下
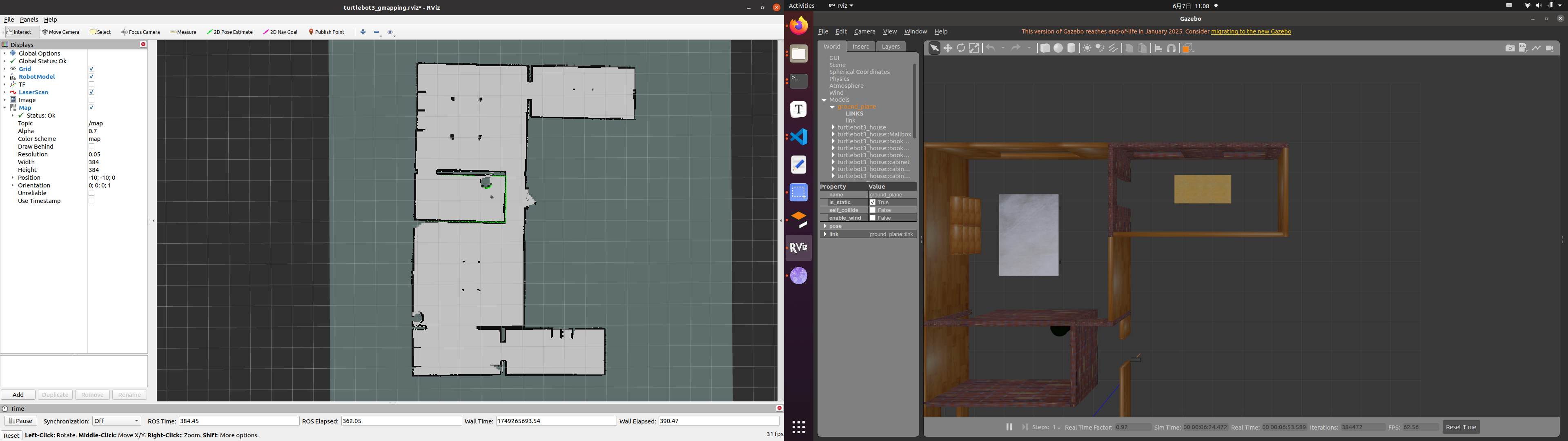
最后探索完成后如图所示
完整演示视频如下: