集成D435i和px4无人机、安装VINS-Fusion
PX4 + D435i 进行gazebo仿真
Ubuntu安装Vins-Fusion(2) ------ Ubuntu20.04安装vins-fusion
设置一下参数前需进行备份
设置相机内参
启动无人机仿真,查看ros话题rostopic list

查看相机内参(仿真相机的左右目参数是一样的)
powershell
rostopic echo /camera/infra1/camera_info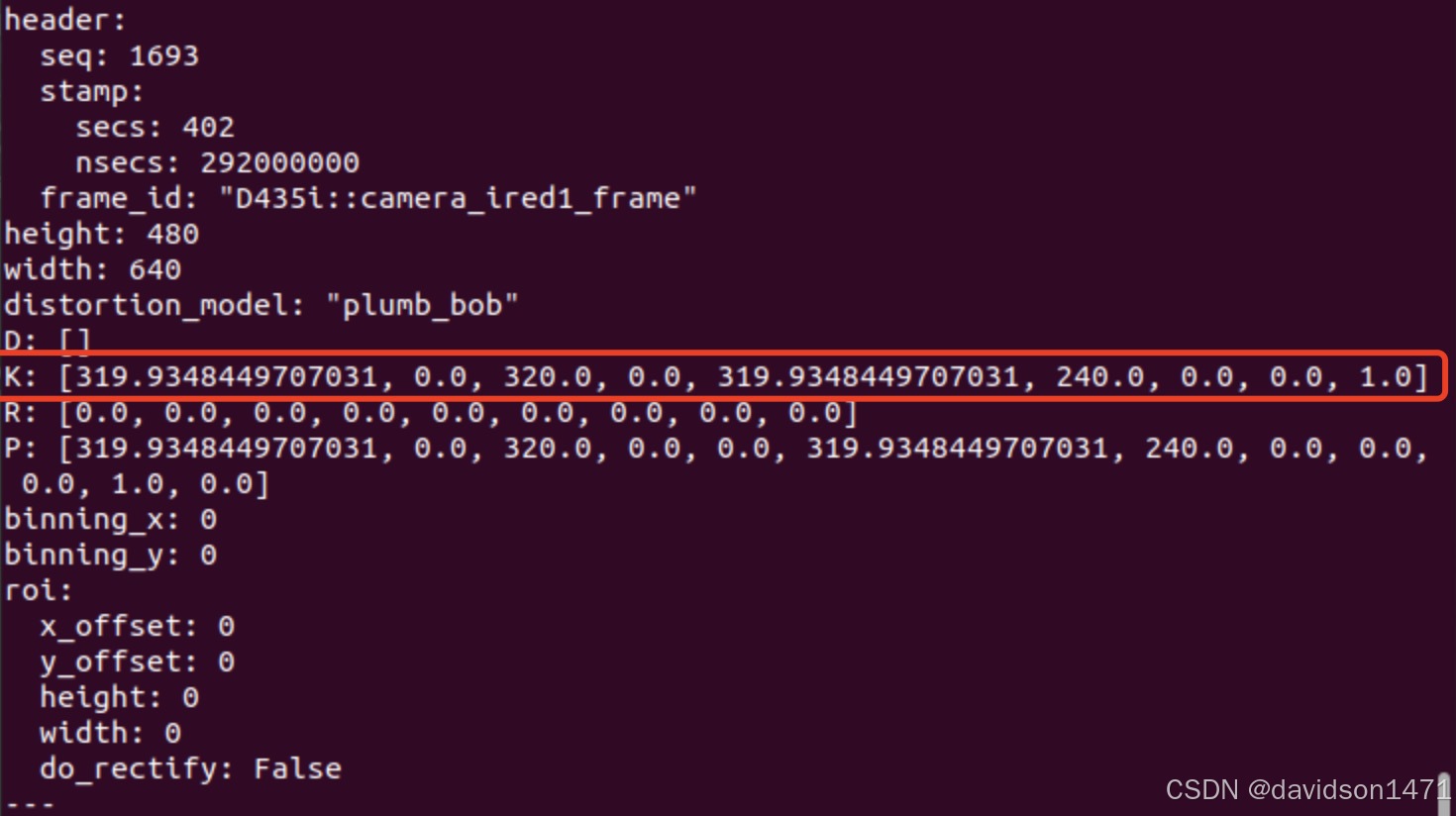
powershell
# 根据下面这个矩阵填写相机的内参
# K = [ fx 0 cx ]
# [ 0 fy cy ]
# [ 0 0 1 ]
#
# fx: 319.9348449707031
# fy: 319.9348449707031
# cx: 320.0
# cy: 240.0right.yaml
yaml
%YAML:1.0
---
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 480
distortion_parameters:
k1: 0.0
k2: 0.0
p1: 0.0
p2: 0.0
projection_parameters:
fx: 319.9348449707031
fy: 319.9348449707031
cx: 320.0
cy: 240.0设置相机外参
设置VINS话题输入
rostopic list中无人机或相机的imu话题、相机左右目话题
相机外参(gazebo中的imu很飘,不建议使用双目 + IMU进行定位)
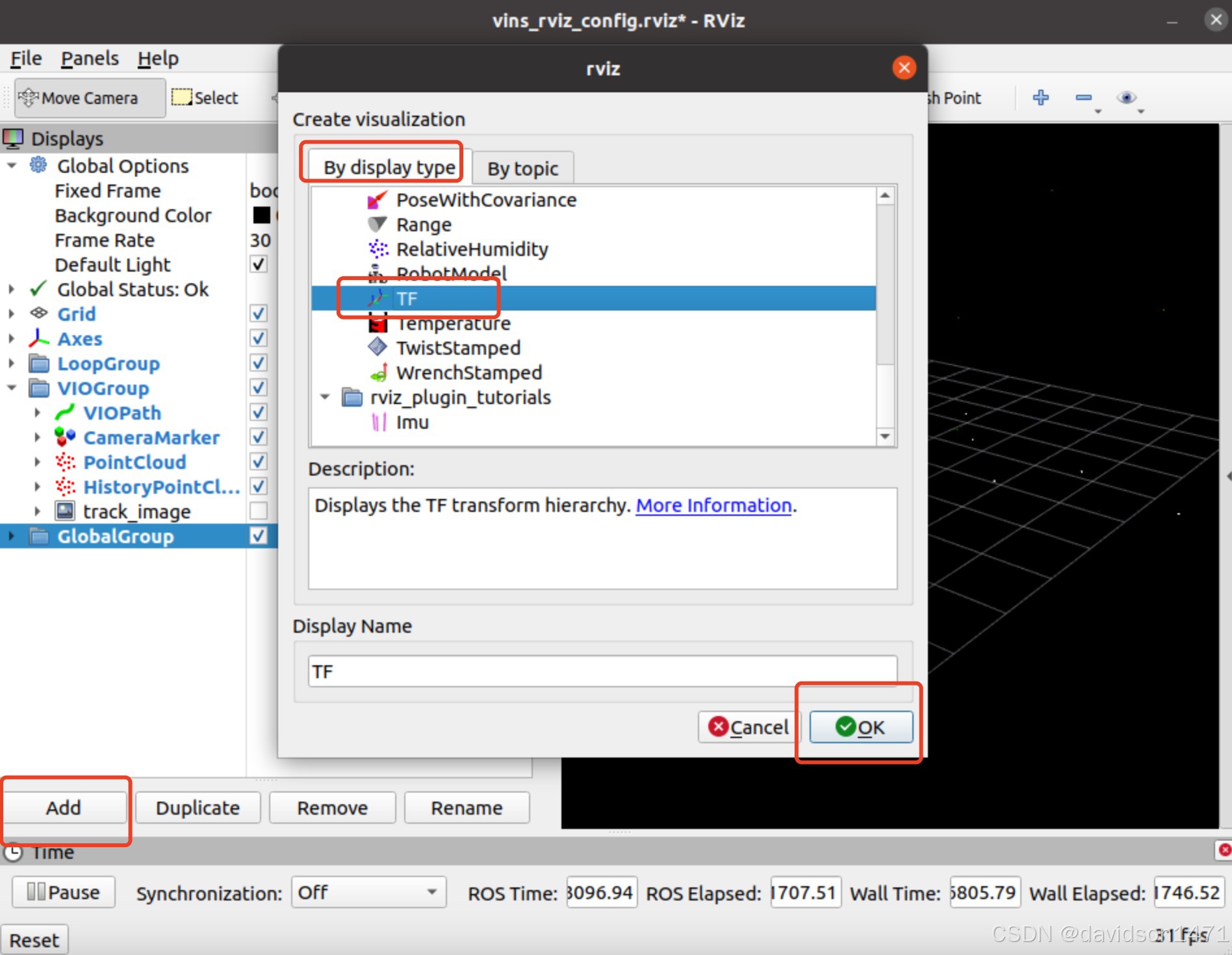
打开无人机gazebo仿真、打开rviz、启用VINS核心节点
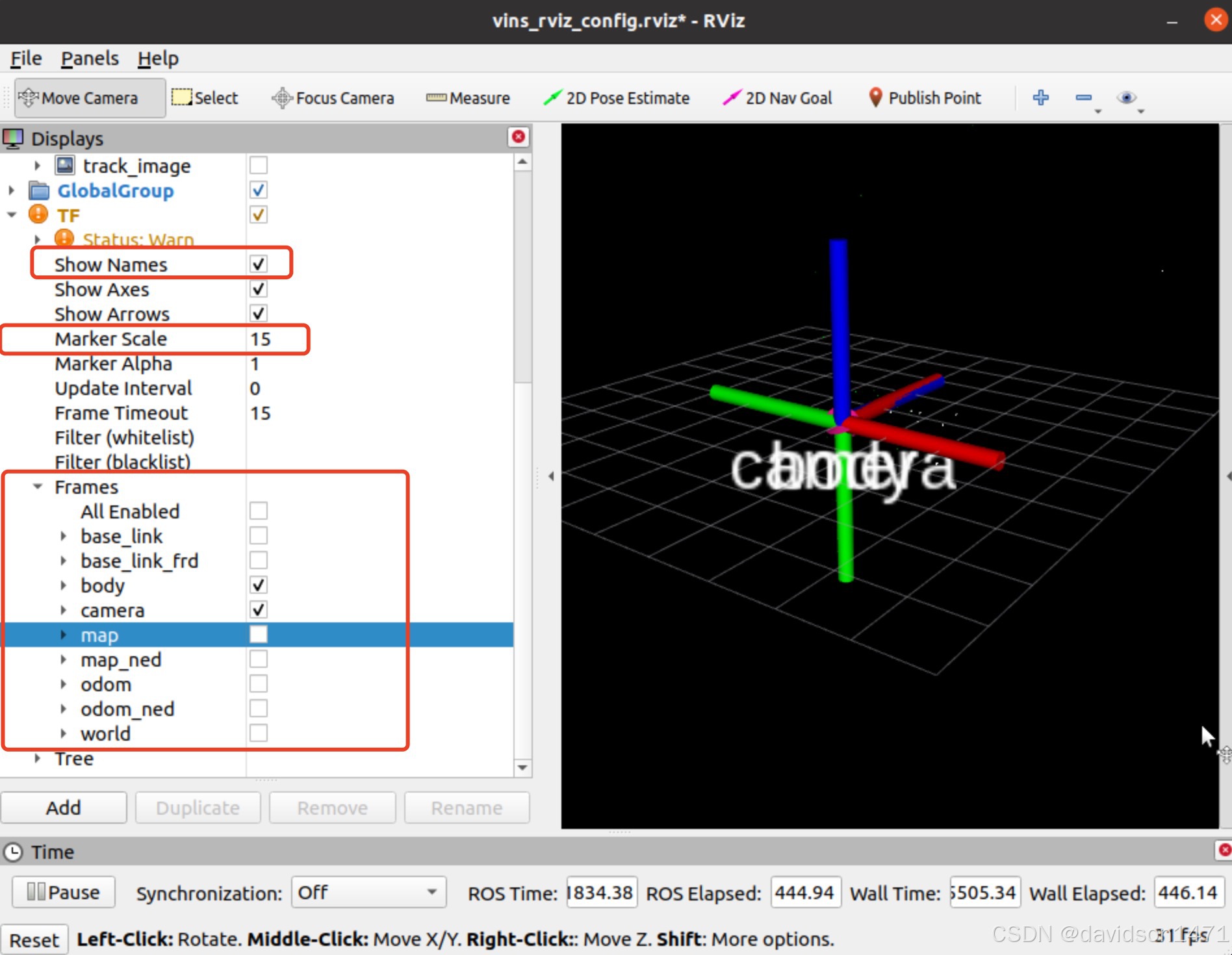
添加tf
查看相对坐标
这里使用的是无人机的imu,故而使用body、camera计算外参
显示偏移和四元数
powershell
rosrun tf tf_echo body camera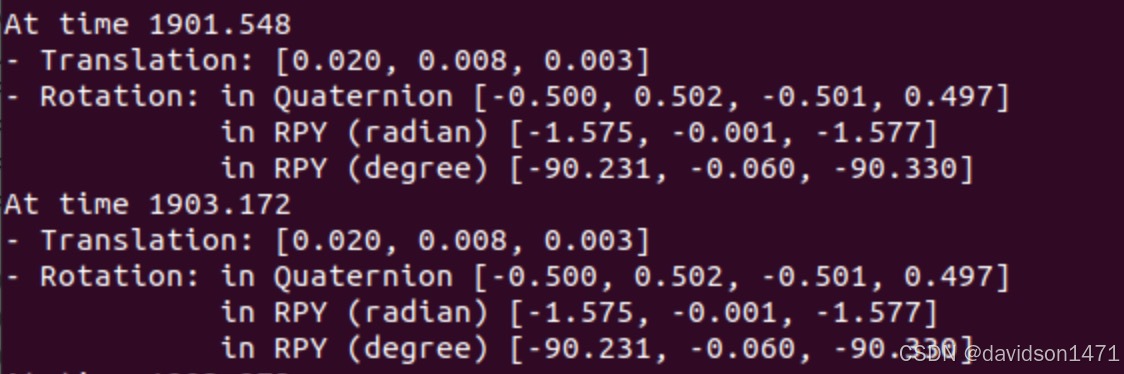
通过偏移量和四元数计算外参矩阵
注: 此处的四元数q = x、y、z、w
PS:可以直接找AI算,输入一下信息进行计算
powershell
生成相机的外参矩阵
At time 1903.172
- Translation: [0.020, 0.008, 0.003]
- Rotation: in Quaternion [-0.500, 0.502, -0.501, 0.497]
in RPY (radian) [-1.575, -0.001, -1.577]
in RPY (degree) [-90.231, -0.060, -90.330]
姿态四元数中w为0.497将生成的外参替换掉data中的数据
修正相机外参
设置VINS的输出路径,需要是绝对路径
必须要自己设置!!!
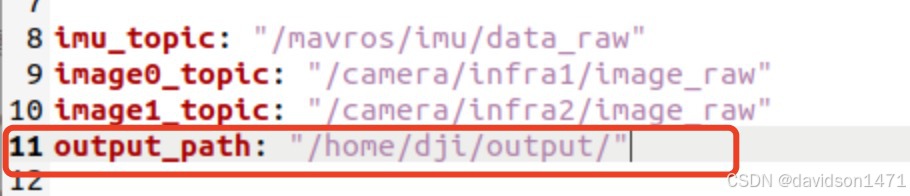
output文件夹中会生成 extrinsic_parameter.csv 文件,使用文本编辑器打开,将生成的外参复制到yaml文件中。
显示track_image、设置特征点
在 realsense_stereo_imu_config.yaml 中设置(我这个是realsense_d435i,不同相机文件名不一定相同)
powershell
# 显示track_image
show_track 设为 1
# 设置最大特征点
max_cnt: 150 # max feature number in feature tracking
# 设置特征点之间的距离
min_dist: 30 # min distance between two features gazebo建图
PS:建议使用砖墙进行建图
- 保存路径:
powershell
PX4-Autopilot/Tools/sitl_gazebo/models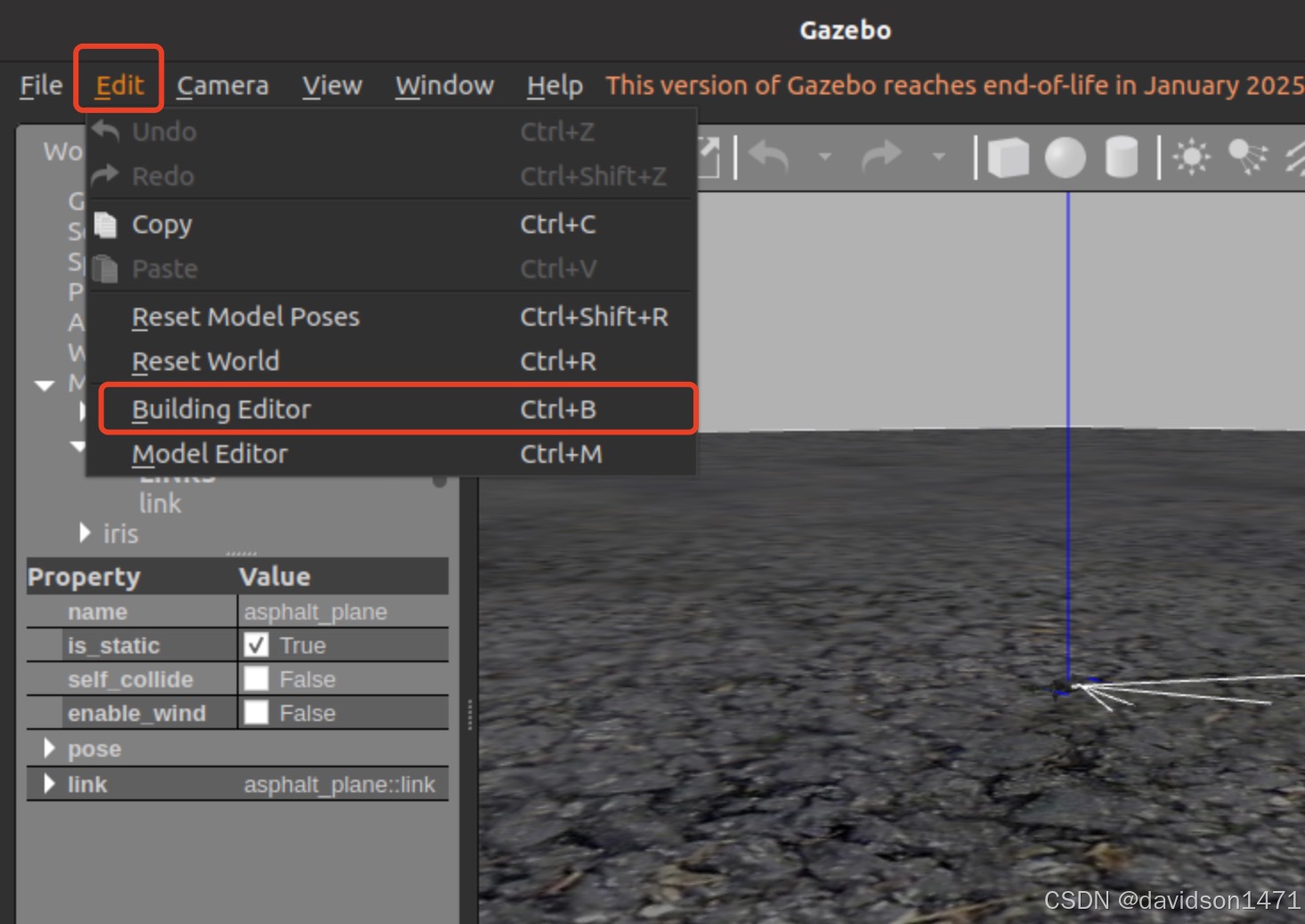
仅使用双目进行定位(无imu)
powershell
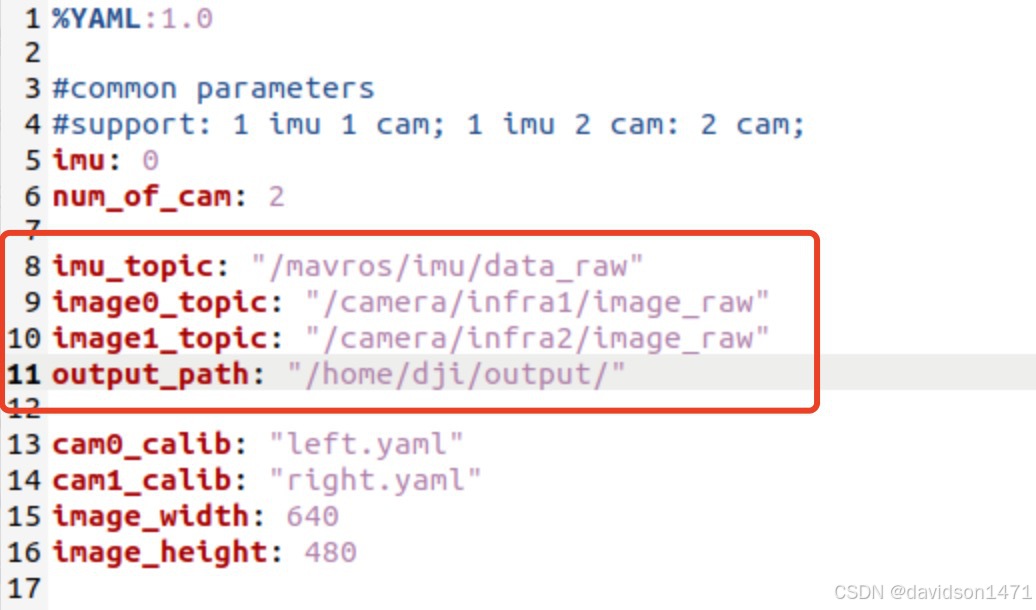
%YAML:1.0
#common parameters
#support: 1 imu 1 cam; 1 imu 2 cam: 2 cam;
# 禁掉imu
imu: 0
num_of_cam: 2
# 修改ros话题输入
imu_topic: "/mavros/imu/data_raw"
image0_topic: "/camera/infra1/image_raw"
image1_topic: "/camera/infra2/image_raw"
output_path: "/home/feng/Vision/output/"
cam0_calib: "left.yaml"
cam1_calib: "right.yaml"
image_width: 640
image_height: 480
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 0 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
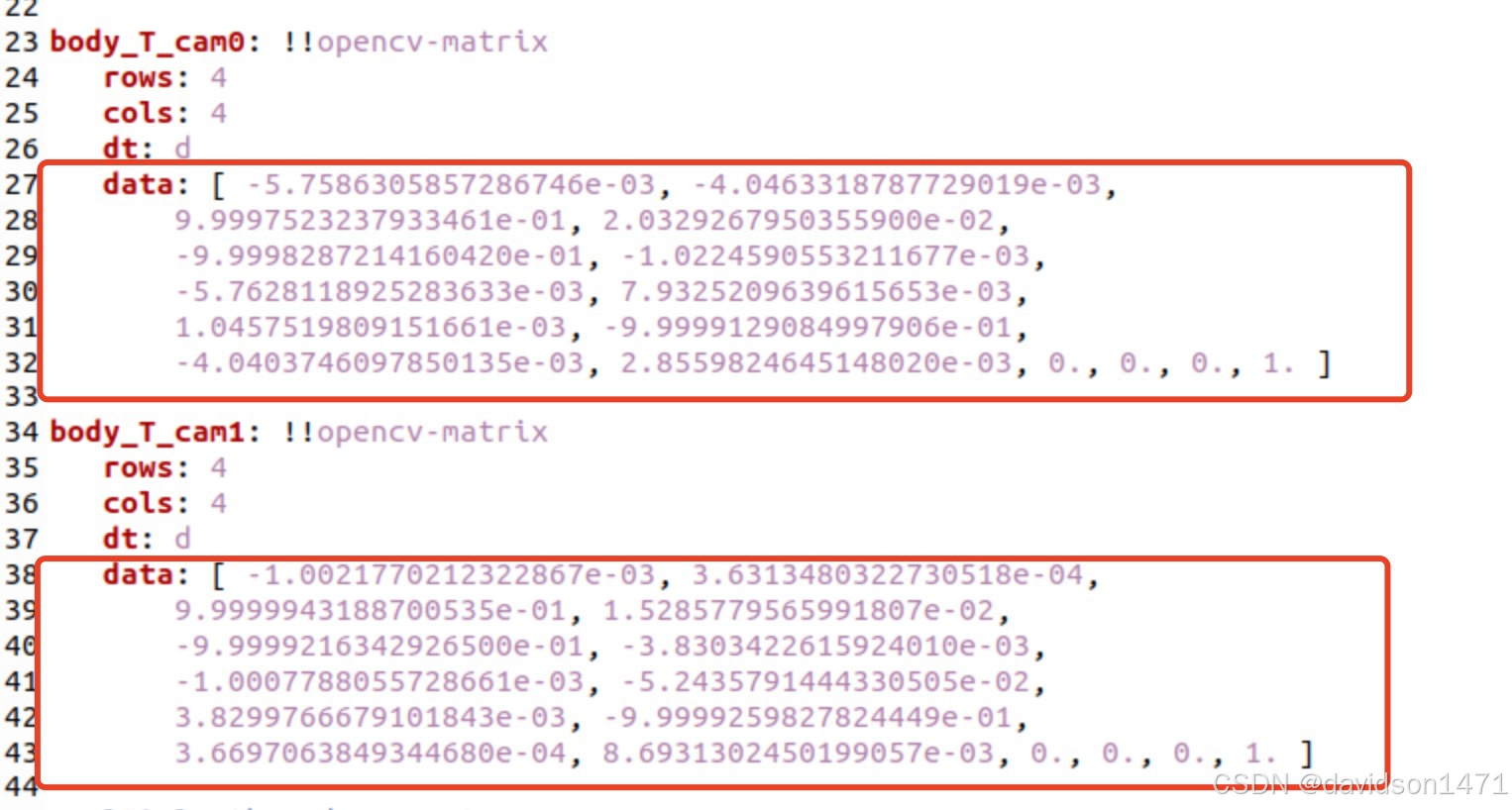
// 外参使用初始参数不做更改
body_T_cam0: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [ -5.7586305857286746e-03, -4.0463318787729019e-03,
9.9997523237933461e-01, 2.0329267950355900e-02,
-9.9998287214160420e-01, -1.0224590553211677e-03,
-5.7628118925283633e-03, 7.9325209639615653e-03,
1.0457519809151661e-03, -9.9999129084997906e-01,
-4.0403746097850135e-03, 2.8559824645148020e-03, 0., 0., 0., 1. ]
body_T_cam1: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [ -1.0021770212322867e-03, 3.6313480322730518e-04,
9.9999943188700535e-01, 1.5285779565991807e-02,
-9.9999216342926500e-01, -3.8303422615924010e-03,
-1.0007788055728661e-03, -5.2435791444330505e-02,
3.8299766679101843e-03, -9.9999259827824449e-01,
3.6697063849344680e-04, 8.6931302450199057e-03, 0., 0., 0., 1. ]
#Multiple thread support
multiple_thread: 1
#feature traker paprameters
# 设置特征点
max_cnt: 300 # max feature number in feature tracking
min_dist: 10 # min distance between two features
freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
# 显示双目图像
show_track: 1 # publish tracking image as topic
flow_back: 1 # perform forward and backward optical flow to improve feature tracking accuracy
#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)QGC限制无人机飞行速度
- MPC_XY_VEL_MAX
- MPC_Z_VEL_MAX_DN
- MPC_Z_VEL_MAX_UP
参考文档
gazebo中vins-fusion在仿真小车上的部署
gazebo仿真跑VINS-Fusion双目视觉惯性SLAM
QGC地面站对PX4无人机速度进行限制