焦距的像素单位标定
- **一、焦距的物理意义与数学表达**
-
- [**1. 物理焦距(毫米单位)**](#1. 物理焦距(毫米单位))
- [**2. 像素单位焦距的转换**](#2. 像素单位焦距的转换)
- [**3. 小孔成像模型与成像公式**](#3. 小孔成像模型与成像公式)
- **二、焦距标定的方法与工具**
-
- [**1. 为什么需要标定?**](#1. 为什么需要标定?)
- [**2. 常用标定方法**](#2. 常用标定方法)
- [**3. 标定工具**](#3. 标定工具)
- **三、像素单位焦距在深度估计中的应用**
-
- [**1. 基于物体大小的深度计算**](#1. 基于物体大小的深度计算)
- [**2. 双目视觉中的深度计算**](#2. 双目视觉中的深度计算)
- [**3. 深度学习中的应用**](#3. 深度学习中的应用)
- **四、常见问题与注意事项**
-
- [**1. 焦距与视角的关系**](#1. 焦距与视角的关系)
- [**2. 径向畸变的影响**](#2. 径向畸变的影响)
- [**3. 标定精度对深度估计的影响**](#3. 标定精度对深度估计的影响)
- **五、总结**
在计算机视觉中,摄像头的**焦距(f)**是一个核心参数,它描述了光学系统将光线聚焦到成像平面的能力。
在单目深度估计中, 焦距的像素单位标定 是连接物理世界与图像像素的桥梁,直接影响从图像反推真实世界尺寸和距离的精度。
以下是对其含义、标定方法及应用的详细解释:
一、焦距的物理意义与数学表达
1. 物理焦距(毫米单位)
在传统光学中,焦距(f)是指镜头光心到成像平面(传感器)的距离,单位通常为毫米(mm)。例如,手机摄像头的焦距可能为5mm,而单反相机长焦镜头的焦距可达200mm。焦距越长,视角越窄,物体在图像中显得越大。
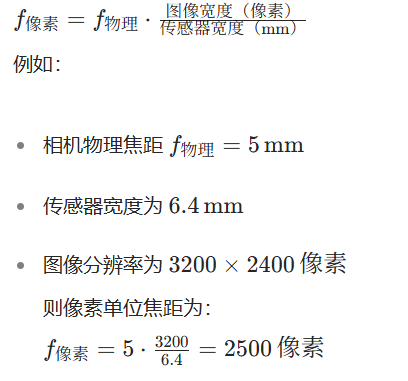
2. 像素单位焦距的转换
在计算机视觉中,我们需要将物理焦距转换为像素单位,以便与图像像素坐标进行运算。这一转换通过以下公式实现:
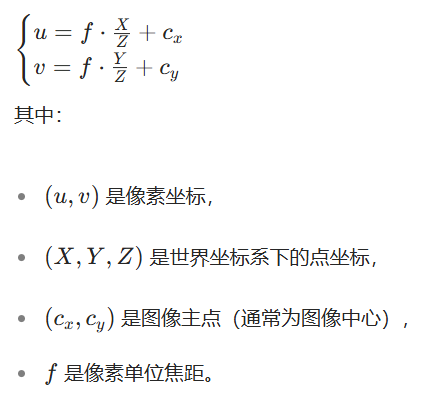
3. 小孔成像模型与成像公式
像素单位焦距在小孔成像模型 中尤为重要。该模型描述了三维空间中的点 ( P(X, Y, Z) ) 如何投影到图像平面上的像素点 ( p(u, v) ):
二、焦距标定的方法与工具
1. 为什么需要标定?
- 不同摄像头的焦距不同,即使同一型号的摄像头也可能存在制造误差。
- 镜头畸变(如径向畸变)会导致实际成像与理想小孔模型存在偏差,需通过标定校正。
2. 常用标定方法
-
张正友标定法 :
使用棋盘格标定板,从不同角度拍摄多张图像,通过角点检测和最小化重投影误差求解相机内参(包括焦距 ( f_x, f_y )、主点 ( c_x, c_y ) 和畸变系数)。-
OpenCV实现 :
pythonimport cv2 import numpy as np # 准备标定板角点坐标 objp = np.zeros((6*7, 3), np.float32) objp[:, :2] = np.mgrid[0:7, 0:6].T.reshape(-1, 2) # 存储对象点和图像点的数组 objpoints = [] # 3D点 imgpoints = [] # 2D点 # 加载图像并检测角点 img = cv2.imread('calibration_image.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, corners = cv2.findChessboardCorners(gray, (7, 6), None) if ret: objpoints.append(objp) corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria) imgpoints.append(corners2) # 标定相机 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # mtx 即为相机内参矩阵,其中 mtx[0, 0] 和 mtx[1, 1] 分别为 fx 和 fy
-
-
自标定方法 :
在未知场景中,通过分析视频序列中的运动(如光流)或场景中的几何约束(如平行线)估计焦距。
3. 标定工具
- OpenCV :提供
calibrateCamera函数,支持棋盘格、圆形标定板等。 - Matlab Camera Calibrator:图形界面工具,操作简单,适合初学者。
- Kalibr:ROS环境下的多传感器标定工具,支持相机-IMU联合标定。
三、像素单位焦距在深度估计中的应用
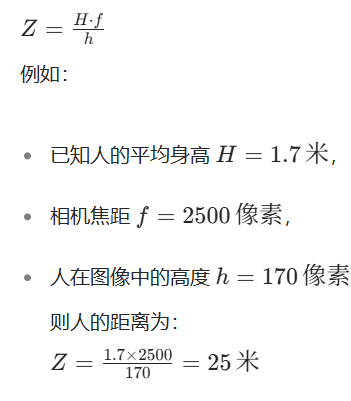
1. 基于物体大小的深度计算
在单目深度估计中,若已知物体的实际高度 ( H ) 和图像中的像素高度 ( h ),可通过以下公式计算距离 ( Z ):
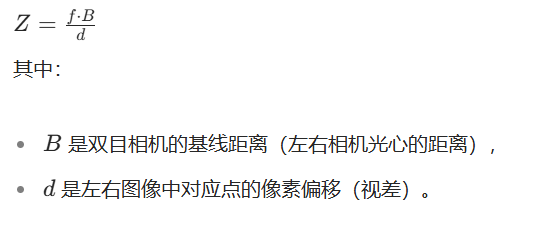
2. 双目视觉中的深度计算
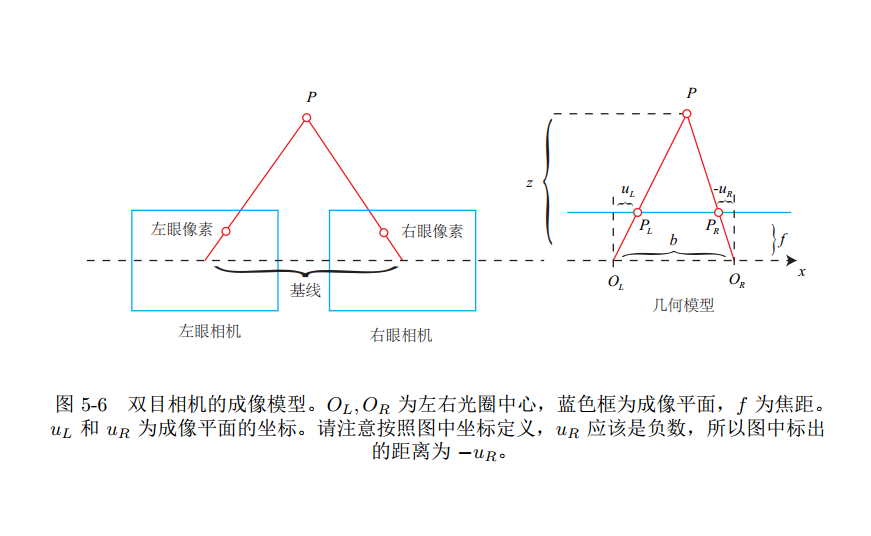
两个相机的光圈中心都位于 x 轴上。它们的距离称为双目相机的基线 (Baseline, 记作 b),是双目的重要参数;
d 为左右图的横坐标之差,称为视差(Disparity)
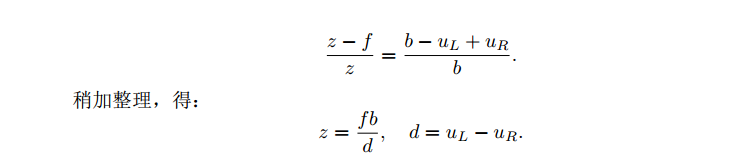
在双目相机系统中,像素单位焦距用于计算视差(disparity)与深度的关系:
3. 深度学习中的应用
在基于深度学习的单目深度估计中,虽然网络可直接预测深度图,但某些方法(如MonoDepth2)仍会利用标定的内参矩阵增强几何约束,提高深度预测的尺度一致性。
四、常见问题与注意事项
1. 焦距与视角的关系
- 短焦距(如手机相机)对应广角镜头,视角大,适合拍摄风景。
- 长焦距(如长焦相机)对应窄视角,适合拍摄远处物体(如野生动物)。
- 在标定中,焦距与图像宽度的比值决定了相机的水平视角:

2. 径向畸变的影响
- 鱼眼镜头或广角镜头会引入明显的径向畸变,导致边缘区域的像素位置偏离理想模型。
- 标定时需同时估计畸变系数(如k1, k2, p1, p2),并使用
undistort函数校正图像。
3. 标定精度对深度估计的影响
- 焦距误差直接导致深度计算误差(如焦距高估10%,深度也会高估10%)。
- 建议使用至少10张不同角度的标定图像,以提高标定精度。
五、总结
像素单位焦距是连接三维物理世界与二维图像的关键参数,它使我们能够通过成像公式将像素尺寸转换为真实世界的距离。在单目深度估计中,准确标定焦距是实现基于几何方法(如物体大小、运动视差)的前提条件。对于深度学习方法,虽然网络可学习隐式的深度关系,但标定内参仍有助于提升尺度一致性和跨场景泛化能力。