C# 基于OpenCv的视觉工作流-章50-霍夫找圆
本章目标:
一、单通道灰度图;
二、霍夫圆检测;
一、单通道灰度图
将图像转为单通道灰度图,章3-转灰度图已介绍,不再详述。
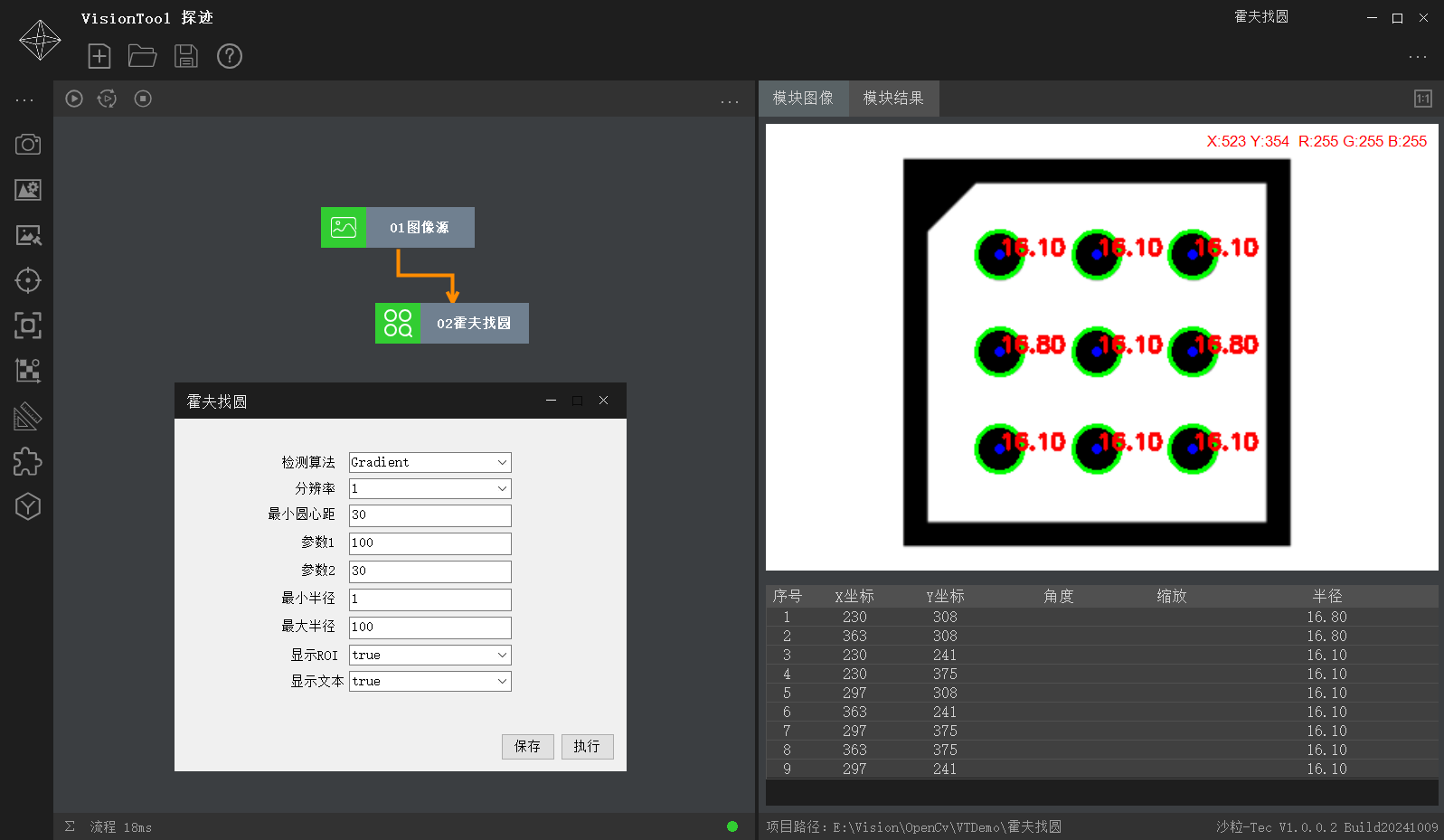
二、霍夫圆检测
OpenCv霍夫圆检测可如下使用:
CircleSegment\[\] circle = Cv2.HoughCircles(grayMat, HoughModes.Gradient, dp, minDist, param1, param2, minRadius, maxRadius);
其中:参数1,为输入灰度图像;
参数2,为检测方法;
参数3,为累加器分辨率与图像分辨率的反比;
参数4,为最小圆心距;
参数5,为边缘检测梯度值;
参数6,为方法特定参数:HOUGH_GRADIENT:圆心检测的累加器阈值,值越小检测到的圆越多但假圆也越多;HOUGH_GRADIENT_ALT:圆的"完美度"度量,越接近 1 算法选择的圆形形状越好,一般设置 0.9,检测小圆可降至 0.85 或 0.8;
参数7,为最小半径;
参数8,为最大半径;
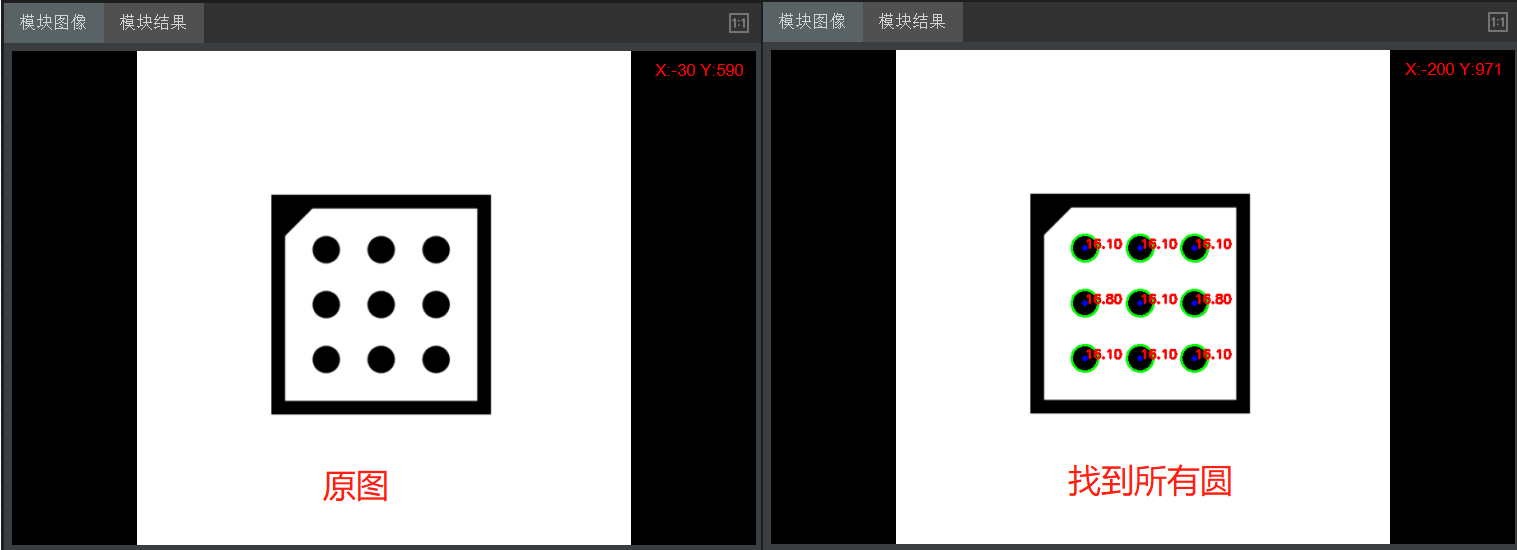
效果如下图
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
"VisionTool Halcon"付费视觉工具,淘宝可搜
下载地址:https://pan.baidu.com/s/1v832KTonDYS6oNnWG2iZtQ?
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!